| Citation: | FU J B,ZHANG D,ZHAO J M,et al. On-line co-location method of distributed missile swarms for maneuvering targets[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):1027-1036 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0361

|
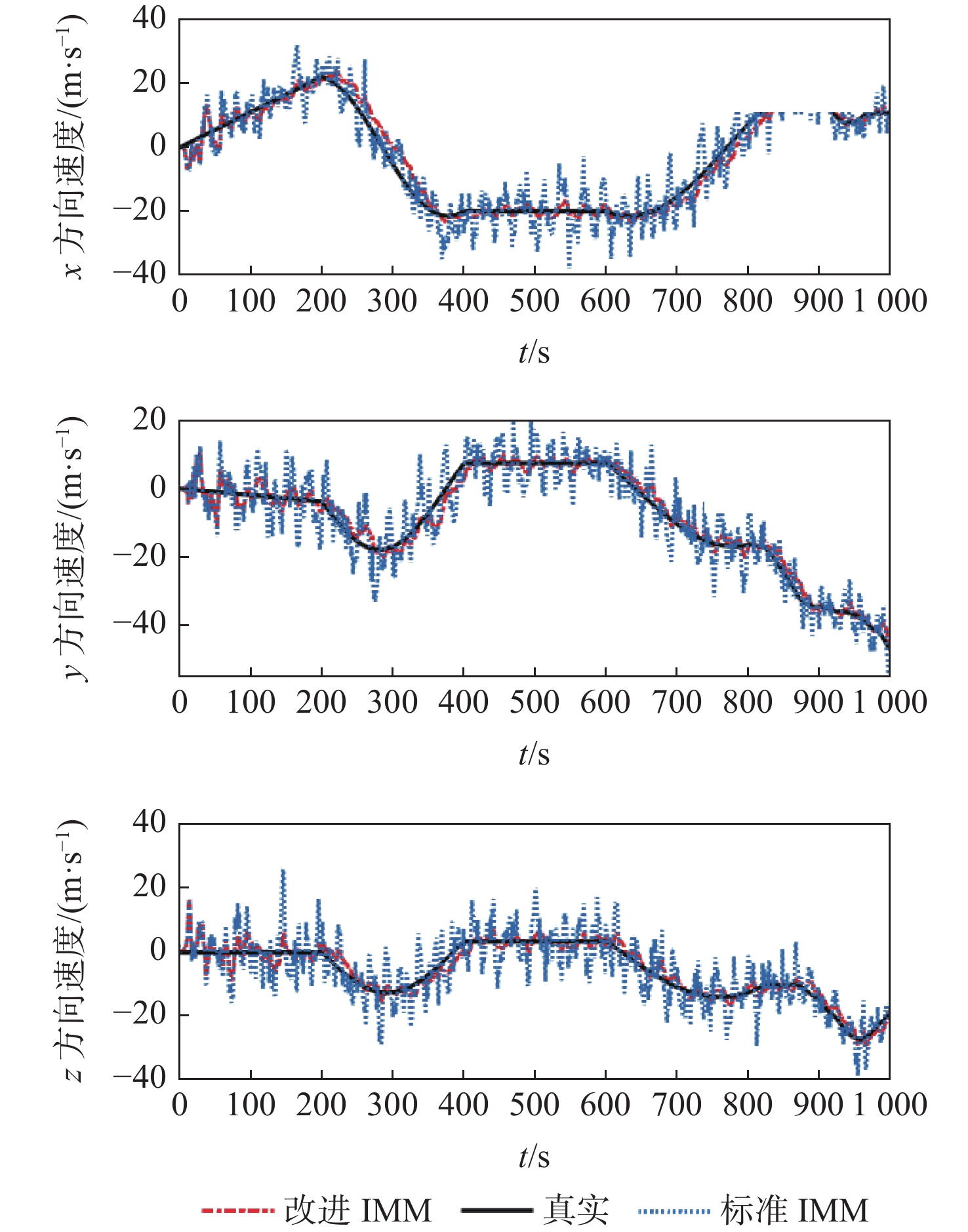
High-precision co-location of maneuvering targets is the key to coordinated strikes, and co-location through distributed bomb swarms is a current research hotspot. This paper proposes a distributed online co-location strategy for swarms to solve the real-time problem of co-location under the condition of limited swarm communication. Aiming at the characteristics of model nonlinearity and non-Gaussian distribution of noise in target state estimation, a volumetric Kalman is proposed. Particle filter algorithm, a constant-speed turning model (constant turn, CT) with adaptive turning rate is designed, and the existing 2D CT model is extended to 3D, which solves the problem of inconsistency in positioning accuracy caused by the fixed turning rate of the existing CT model. An interactive multi-model method of adaptive model transition probability is designed, and the Markov transition probability is corrected in real time, which solves the problem of low positioning accuracy of single-model filtering. The effectiveness and accuracy of the method proposed in this paper are verified by simulation.

| [1] |
魏明英, 崔正达, 李运迁. 多弹协同拦截综述与展望[J]. 航空学报, 2020, 41(S1): 29-36. doi: 10.7527/S1000-6893.2020.23804
WEI M Y, CUI Z D, LI Y Q. Review and future development of multi-missile coordinated interception[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 29-36(in Chinese). doi: 10.7527/S1000-6893.2020.23804
|
| [2] |
徐胜利, 张迪, 赵宏宇. 基于体系对抗的多弹协同制导技术研究[J]. 战术导弹技术, 2019, 193(1): 85-92. doi: 10.16358/j.issn.1009-1300.2019.8.054
XU S L, ZHANG D, ZHAO H Y. Research on multimissile cooperative guidance technology based on system confrontation[J]. Tactical Missile Technology, 2019, 193(1): 85-92(in Chinese). doi: 10.16358/j.issn.1009-1300.2019.8.054
|
| [3] |
赵建博, 杨树兴. 多导弹协同制导研究综述[J]. 航空学报, 2017, 38(1): 020256.
ZHAO J B, YANG S X. Review of multi-missile cooperative guidance research[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(1): 020256(in Chinese).
|
| [4] |
任鹏飞, 马启欣. 导弹编队协同作战过程及关键问题分析[J]. 战术导弹技术, 2016(4): 82-87. doi: 10.16358/j.issn.1009-1300.2016.04.15
REN P F, MA Q X. Process and key problems analysis of missile formation cooperative combat[J]. Tactical Missile Technology, 2016(4): 82-87(in Chinese). doi: 10.16358/j.issn.1009-1300.2016.04.15
|
| [5] |
冯道旺, 李宗华, 周一宇. 一种单站无源定位方法及其可观测性分析[J]. 国防科技大学学报, 2004, 26(1): 68-71.
FENG D W, LI Z H, ZHOU Y Y. A new single observer passive location and tracking technology and its observability analysis[J]. Journal of National University of Defense Technology, 2004, 26(1): 68-71(in Chinese).
|
| [6] |
GREGORY P, PEDRO D, DANIEl P. Target localization using multiple UAVs with sensor fusion via sigma-point Kalman filtering[C]//AIAA Infotech@Aerospace 2007 Conference and Exhibit. Reston: AIAA , 2007: 2845.
|
| [7] |
张治, 卢鸿谦, 班晓军, 等. 基于MEMS/GNSS的多机协同无源定位[J]. 光学精密工程, 2021, 29(12): 2844-2854. doi: 10.37188/OPE.2021.0285
ZHANG Z, LU H Q, BAN X J, et al. Multi-machine cooperative passive positioning based on MEMS/GNSS[J]. Optics and Precision Engineering, 2021, 29(12): 2844-2854(in Chinese). doi: 10.37188/OPE.2021.0285
|
| [8] |
张杰, 李婧华, 胡超. 基于容积卡尔曼滤波的卫星导航定位解算方法[J]. 中国科学院大学学报, 2021, 38(4): 532-537. doi: 10.7523/j.issn.2095-6134.2021.04.013
ZHANG J, LI J H, HU C. Satellite navigation and positioning solution based on volumetric Kalman filtering[J]. Journal of University of Chinese Academy of Sciences, 2021, 38(4): 532-537(in Chinese). doi: 10.7523/j.issn.2095-6134.2021.04.013
|
| [9] |
徐诚, 黄大庆, 孔繁锵. 一种小型无人机无源目标定位方法及精度分析[J]. 仪器仪表学报, 2015, 36(5): 1115-1122. doi: 10.3969/j.issn.0254-3087.2015.05.019
XU C, HUANG D Q, KONG F Q. A passive target positioning method and accuracy analysis of a small unmanned aerial vehicle[J]. Journal of Instrumentation, 2015, 36(5): 1115-1122(in Chinese). doi: 10.3969/j.issn.0254-3087.2015.05.019
|
| [10] |
DHITAL A. Bayesian filtering for dynamic systems with applications to tracking[D]. Barcelona: Universitat Politecnica de Ctalunya, 2010.
|
| [11] |
王宏健, 李村, 么洪飞, 等. 基于高斯混合容积卡尔曼滤波的UUV自主导航定位算法[J]. 仪器仪表学报, 2015, 36(2): 254-261. doi: 10.19650/j.cnki.cjsi.2015.02.002
WANG H J, LI C, YAO H F, et al. UUV autonomous navigation and localization algorithm based on Gaussian mixed volume Kalman filter[J]. Journal of Instrumentation, 2015, 36(2): 254-261(in Chinese). doi: 10.19650/j.cnki.cjsi.2015.02.002
|
| [12] |
周帆, 江维, 李树全, 等. 基于粒子滤波的移动物体定位和追踪算法[J]. 软件学报, 2013, 24(9): 2196-2213.
ZHOU F, JIANG W, LI S Q, et al. A moving object localization and tracking algorithm based on particle filter[J]. Journal of Software, 2013, 24(9): 2196-2213(in Chinese).
|
| [13] |
王美健. 基于多模型(MM)的机动目标跟踪算法研究[D]. 无锡: 江南大学, 2016.
WANG M J. Research on maneuvering target tracking algorithm based on multi-model (MM) [D]. Wuxi: Jiangnan University, 2016(in Chinese).
|
| [14] |
夏佩伦. 目标跟踪与信息融合[M]. 北京: 国防工业出版社, 2010: 146-160.
XIA P L. Target tracking and information fusion [M]. Beijing: National Defense Industry Press, 2010: 146-160(in Chinese).
|
| [15] |
BAR-SHALOM Y , BIRMIWAL K. Variable dimension filter for maneuvering target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 1982, 18(5): 621-629.
|
| [16] |
ZHOU W D, LIU M M. Robust interacting multiple model algorithms based on multi-sensorfusion criteria[J]. International Journal of Systems Science, 2015, 47(1): 92-106.
|
| [17] |
LI W L, JIA Y M. An information theoretic approach to interacting multiple model estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 1811-1825. doi: 10.1109/TAES.2015.140542
|
| [18] |
DENG Z L, ZHANG P, QI W J. Sequential covariance intersection fusion Kalman filter[J]. Information Sciences, 2012, 189(7): 293-309.
|
| [19] |
蔡李根. 基于多模型的地面机动目标协同定位方法[D]. 哈尔滨: 哈尔滨工业大学, 2020.
CAI L G. Coordinated localization method of ground maneuvering targets based on multi-model [D]. Harbin: Harbin Institute of Technology, 2020(in Chinese).
|
| [20] |
徐小良, 汤显峰, 葛泉波, 等. 基于量化新息的容积粒子滤波融合目标跟踪算法[J]. 自动化学报, 2014, 40(9): 1867-1874.
XU X L, TANG X F, GE Q B, et al. Volumetric particle filter fusion target tracking algorithm based on quantitative innovation[J]. Journal of Automatica Sinica, 2014, 40(9): 1867-1874(in Chinese).
|
Figures(14) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: