



Momentum equalization control of space robot with control moment gyroscopes for joint actuation
-
摘要:
针对Ⅴ构型控制力矩陀螺(CMGs)驱动的冗余空间机器人的CMGs角动量饱和问题,提出一种角动量平衡控制方法。该方法从平衡使用机械臂各臂杆CMGs角动量的思想出发,定义了角动量平衡指标,并使用加速度分解技术和逆动力学方法设计了角动量平衡控制器。该控制器可在保证机械臂跟踪工作空间轨迹的同时,利用机械臂的空转运动使得角动量平衡指标尽量减小,即各臂CMGs的角动量使用趋于平均,从而降低某些臂杆的CMGs先行饱和的可能性,充分利用CMGs的控制能力。基于平面三自由度冗余机械臂的数值仿真结果验证了所设计的控制器的有效性。
Abstract:An angular momentum equalization control method was proposed for redundant space robot with scissored-pair control moment gyroscopes (CMGs) for joint actuation. This method utilizes the space robot's extra degrees of freedom to equalize momentum usage among arm links, thus achieving CMGs' simultaneous saturation and better trajectory tracking ability. A momentum equalization index was defined following the idea of equal momentum usage to achieve simultaneous CMGs saturation. A control technique was developed based on acceleration-level redundancy resolution and inverse dynamics control, with precious operational space tracking ability and momentum equalization index local minimization functionality. The local minimization of momentum equalization index serves as a means to use angular momenta as equally as possible, which decreases the possibility of non-simultaneous saturation and takes full advantage of the CMGs' angular momentum capacity. A planar three degree-of-freedom redundant manipulator was used in numerical simulation to verify the effectiveness of the control technique.
-
Key words:
- space application /
- robot /
- gyroscopes /
- redundant manipulator /
- angular momentum /
- optimization
-

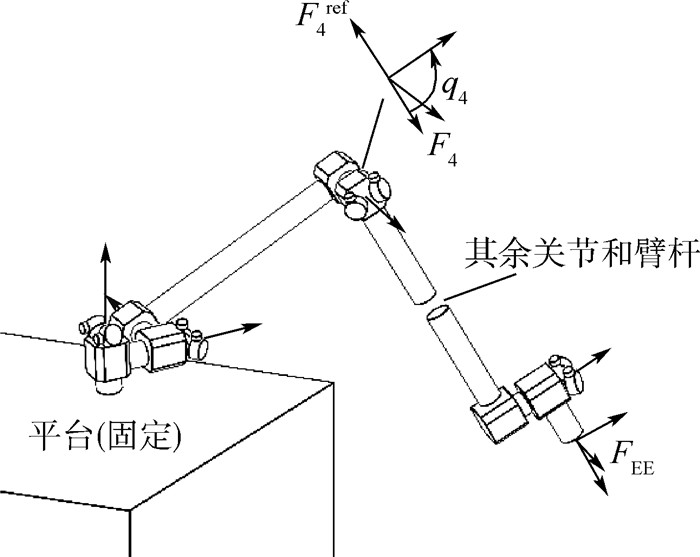
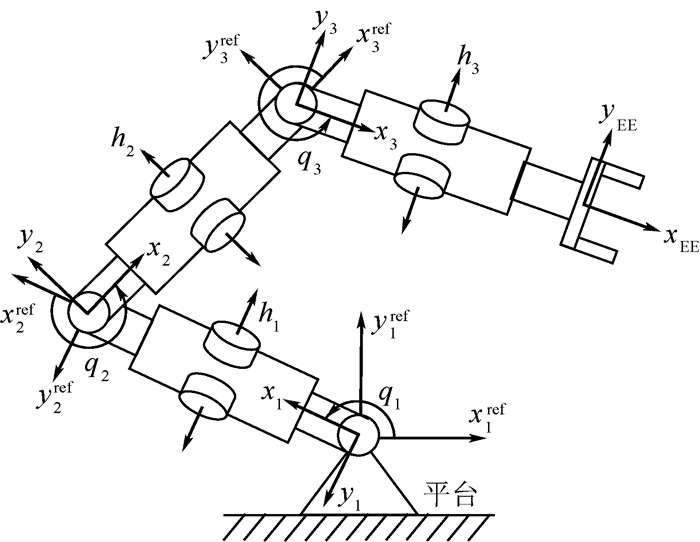
图 1 控制力矩陀螺驱动的冗余机械臂示意图
Figure 1. Schematic diagram of redundant manipulator with CMGs for joint actuation
表 1 安装参数
Table 1. Installation parameters
臂杆编号 安装位置/m 安装方向 1 [0 0 0]T 单位阵 2 [1 0 0]T 单位阵 3 [1 0 0]T 单位阵  下载: 导出CSV
下载: 导出CSV
表 2 惯性参数
Table 2. Inertial parameters
臂杆编号 质量/kg 静矩/(kg·m) 惯量/(kg·m2) 1 25 [12.5 0 0]T [0.0313 8.349 8.349] 2 25 [12.5 0 0]T [0.0313 8.349 8.349] 3 25 [12.5 0 0]T [0.0313 8.349 8.349]
下载: 导出CSV
-
[1] FLORES-ABAD A, MA O, PHAM K, et al.A review of space robotics technologies for on-orbit servicing[J].Progress in Aerospace Sciences, 2014, 68:1-26. doi: 10.1016/j.paerosci.2014.03.002 [2] XU W, LIANG B, XU Y.Survey of modeling, planning, and ground verification of space robotic systems[J].Acta Astronautica, 2011, 68(11):1629-1649. https://www.researchgate.net/publication/251506854_Survey_of_modeling_planning_and_ground_verification_of_space_robotic_systems [3] VAFA Z.On the dynamics of space manipulators using the virtual manipulator, with applications to path planning[J].The Journal of the Astronautical Sciences, 1990, 38(4):441-472. https://www.researchgate.net/publication/4699146_On_the_Dynamics_of_Space_Manipulators_Using_the_Virtual_Manipulator_with_Applications_to_Path_Planning [4] TORRES M A, DUBOWSKY S.Minimizing spacecraft attitude disturbances in space manipulator systems[J].Journal of Guidance, Control, and Dynamics, 1992, 15(4):1010-1017. doi: 10.2514/3.20936 [5] YOSHIDA K, HASHIZUME K, ABIKO S.Zero reaction maneuver:Flight validation with ETS-Ⅶ space robot and extension to kinematically redundant arm[C]//IEEE International Conference on Robotics and Automation, 2001 ICRA.Piscataway, NJ:IEEE Press, 2001, 1:441-446. [6] NENCHEV D N.Reaction null space of a multibody system with applications in robotics[J].Mechanical Sciences, 2013, 4(1):97-112. doi: 10.5194/ms-4-97-2013 [7] PECK M, PALUSZEK M, THOMAS S, et al.Control-moment gyroscopes for joint actuation:A new paradigm in space robotics[C]//1st Space Exploration Conference:Continuing the Voyage of Discovery, American Institute of Aeronautics and Astronautics Inc.Reston:AIAA, 2005, 1:204-233. [8] PECK M A.Low-power, high-agility space robotics[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit.Reston:AIAA, 2005:1-12. [9] OSUKA K, YOSHIDA K, ONO T.New design concept of space manipulator:A proposal of torque-unit manipulator[C]//Proceedings of the 33rd IEEE Conference on Decision and Control.Piscataway, NJ:IEEE Press, 1994, 2:1823-1825. [10] HOKAMOTO S.Torque unit manipulator driven by control moment gyros[J].Advances in the Astronautical Sciences, 1997, 96:865-876. https://www.researchgate.net/publication/271412630_Torque-Unit-Manipulator_Driven_by_Control_Moment_Gyros [11] CARPENTER M D, PECK M A.Reducing base reactions with gyroscopic actuation of space-robotic systems[J].IEEE Transactions on Robotics, 2009, 25(6):1262-1270. doi: 10.1109/TRO.2009.2032953 [12] CARPENTER M D, PECK M A.Minimum-power robotic maneuvering using control-moment gyroscopes[C]//AIAA Guidance, Navigation, and Control Conference 2007.Reston:AIAA, 2007:210-222. [13] CARPENTER M D, PECK M A.Power-optimal steering of a space robotic system driven by control-moment gyroscopes[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit.Reston:AIAA, 2008. [14] BROWN D.Control moment gyros as space-robotics actuators[C]//AIAA Guidance, Navigation and Control Conference and Exhibit.Reston:AIAA, 2008. [15] BROWN D, PECK M.Energetics of control moment gyroscopes as joint actuators[J].Journal of Guidance, Control, and Dynamics, 2009, 32(6):1871-1883. doi: 10.2514/1.42313 [16] 贾英宏, 赵楠, 徐世杰.控制力矩陀螺驱动的空间机器人轨迹跟踪控制[J].北京航空航天大学学报, 2014, 41(3):285-291. http://bhxb.buaa.edu.cn/CN/abstract/abstract12863.shtmlJIA Y H, ZHAO N, XU S J.Trajectory tracking control of space robot actuated by control moment gyroscopes[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 41(3):285-291(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12863.shtml [17] 赵楠, 贾英宏, 徐世杰.无反作用力矩空间机器人轨迹跟踪控制[J].中国空间科学技术, 2014, 34(2):13-21. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201402003.htmZHAO N, JIA Y H, XU S J.Trajectory tracking control of a reactionless space robot[J].Chinese Space Science and Technology, 2014, 34(2):13-21(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGKJ201402003.htm [18] SICILIANO B, SCIAVICCO L, VILLANI L, et al.Robotics:Modelling, planning and control[M].Berlin:Springer Science & Business Media, 2010:305, 348. [19] KANE T R, LEVINSON D A.Dynamics, theory and applications[M].New York:McGraw Hill, 1985:106, 158-159. [20] 胡权, 贾英宏, 徐世杰.多体系统动力学Kane方法的改进[J].力学学报, 2011, 43(5):968-972. doi: 10.6052/0459-1879-2011-5-lxxb2010-856HU Q, JIA Y H, XU S J.An improved Kane's method for multibody dynamics[J].Chinese Journal of Theoretical and Applied Mechanics, 2011, 43(5):968-972(in Chinese). doi: 10.6052/0459-1879-2011-5-lxxb2010-856 [21] JIA Y H, XU S J.Spacecraft attitude tracking and energy storage using flywheels[J].Chinese Journal of Aeronautics, 2005, 18(1):1-7. doi: 10.1016/S1000-9361(11)60274-4 [22] YOSHIKAWA T. Analysis and control of robot manipulators with redundancy[C]//Robotics Research:The First International Symposium.Cambridge, MA:MIT Press, 1984:735-747. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 998
- HTML全文浏览量: 97
- PDF下载量: 562
- 被引次数: 0
