



-
摘要:
针对高速柔性转子多支点支承的结构特点及转子动力特性设计的需要,分析松动支承对转子动力特性的影响,仿真研究得到多支点支承高速柔性转子系统的非线性振动响应特征。研究结果表明:工作在多阶临界转速以上的转子系统,存在松动支承时,工作中的柔性转子可能存在周期、拟周期、混沌运动。进而研究了松动支承位置、不平衡量、松动间隙等参数对多支点支承柔性转子振动响应的影响,分析结果为多支点支承高速柔性转子系统的动力学设计提供了理论方法。
Abstract:According to the multi-supported structure feature of high-speed flexible rotor and with the demand of rotor dynamic design, the influence of the bearing looseness on the rotor dynamic was analyzed. The nonlinear vibration response characteristics of the high-speed flexible rotor system were obtained through simulation. The results show that when the working speed of rotor is above the critical speed, the periodic, quasi-periodic and chaos can exist when the flexible rotor working. Furthermore, the influence of location of bearing looseness, value of unbalance and bearing clearance on the vibration response of multi-supported flexible rotor was studied. The analysis results provide theoretical method for dynamic design of multi-supported high-speed flexible rotor system.
-
Key words:
- high-speed flexible rotor /
- bearing looseness /
- nonlinear vibration /
- dynamic response /
- dynamic design
-

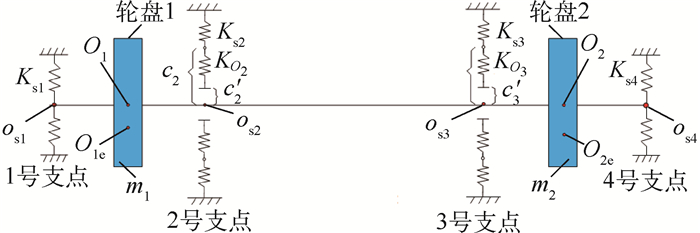
图 1 采用松动支承设计的多支点支承柔性转子模型
Figure 1. Multi-supported flexible rotor model with bearing looseness design

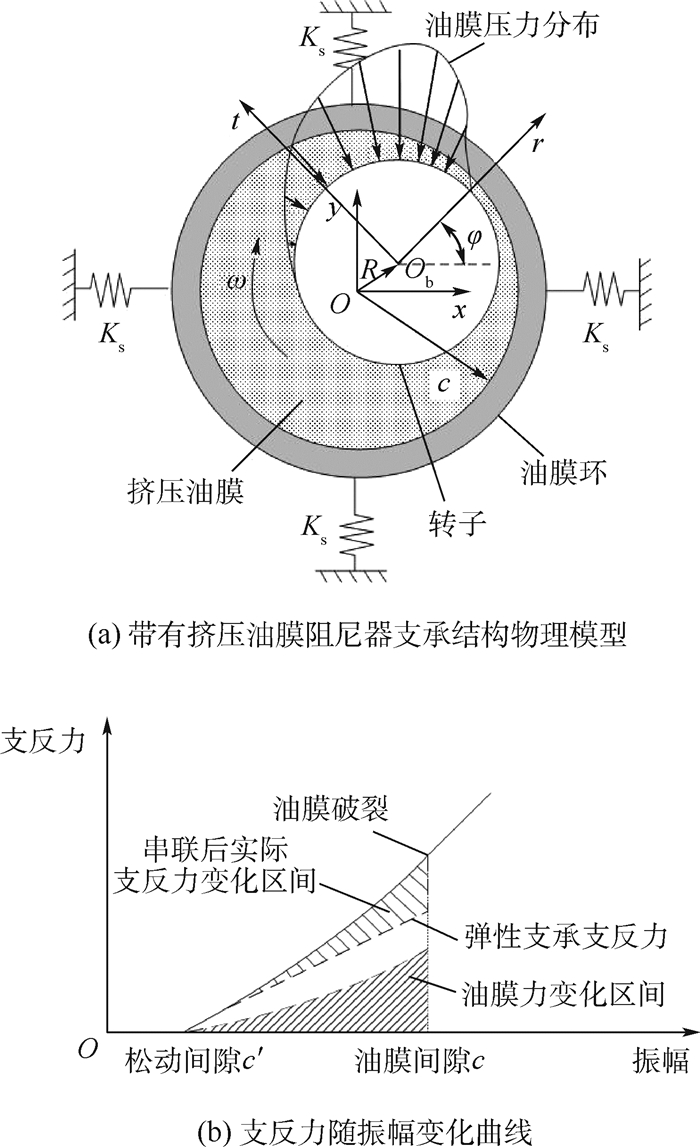
图 2 加大油膜间隙的挤压油膜阻尼器转子模型
Figure 2. Model of SFD rotor system with increased oil film clearance

图 3 多支点支承高速柔性转子系统力学模型
Figure 3. Mechanical model of multi-supported high-speed flexible rotor system

图 4 振幅随转速变化的分岔图
Figure 4. Bifurcation diagram of vibration amplitude changing with rotational speed

图 5 随转速变化的频域瀑布图
Figure 5. Waterfall curve of frequency domain changing with rotational speed

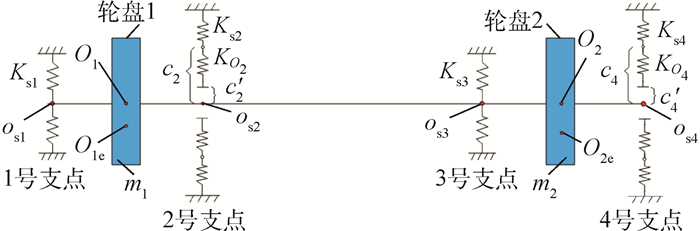
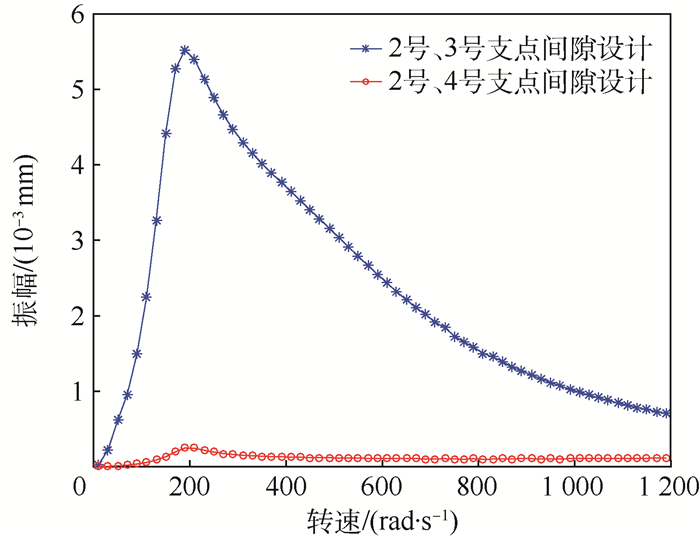
图 8 2号、4号支点采用松动支承设计的多支点支承柔性转子系统
Figure 8. Multi-supported flexible rotor system with bearing clearance designed at Support 2 and Support 4

图 9 松动支承位置不同时2号支点振幅随转速变化的分岔图
Figure 9. Bifurcation diagram of vibration amplitude of Support 2 changing with rotational speed when location of bearing looseness is different

图 10 松动支承位置不同时轮盘2振幅随转速变化的分岔图
Figure 10. Bifurcation diagram of vibration amplitude of Disk 2 changing with rotational speed when location of bearing looseness is different

图 11 松动支承位置不同时3号支点振幅随转速变化的分岔图
Figure 11. Bifurcation diagram of vibration amplitude of Support 3 changing with rotational speed when location of bearing looseness is different

图 12 不平衡量不同时2号支点振幅随转速变化的分岔图
Figure 12. Bifurcation diagram of vibration amplitude of Support 2 changing with rotational speed when unbalance value is different

图 13 支承刚度不同时2号支点振幅随转速变化的分岔图
Figure 13. Bifurcation diagram of vibration amplitude of Support 2 changing with rotational speed when bearing stiffness is different

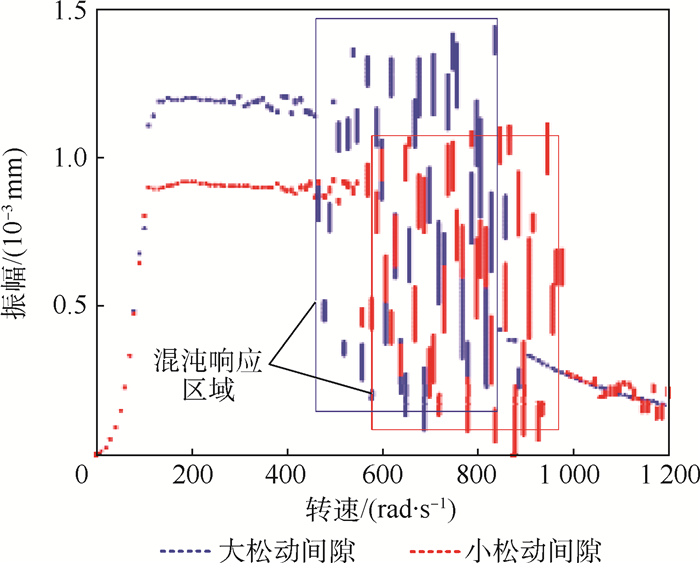
图 14 松动间隙不同时2号支点振幅随转速变化的分岔图
Figure 14. Bifurcation diagram of vibration amplitude of Support 2 changing with rotational speed when bearing clearance is different
表 1 结构参数取值
Table 1. Values of structural parameters
参数 数值 m1e1/(g·mm) 10 m2e2/(g·mm) 10 c′2/mm 7×10-4 c′4/mm 4×10-4 c2-c′2/mm 2×10-4 c4-c′4/mm 2×10-4 k1/(N·m-1) 2×105 k2/(N·m-1) 1×104  下载: 导出CSV
下载: 导出CSV
表 2 挤压油膜阻尼器参数取值
Table 2. Values of SFD parameters
参数 滑油黏度/(Pa·s) 轴向承载长度/mm 轴承半径/mm 数值 1×10-3 90 40
下载: 导出CSV
表 3 轮盘不平衡量取值
Table 3. Unbalance value of disk
不平衡量 m1e1/(g·mm) m2e2/(g·mm) 小不平衡量 10 10 大不平衡量 50 50
下载: 导出CSV
表 4 支承刚度变化区间
Table 4. Variation range of bearing stiffness
支承刚度变化范围 Ks2/(N·m-1) Ks3/(N·m-1) 支承刚度变化范围小 0~1×105 0~1×105 支承刚度变化范围大 0~1×107 0~1×107
下载: 导出CSV
表 5 松动间隙参数取值
Table 5. Parameter values of bearing clearance
松动间隙 c′2/mm c′4/mm c2/mm c4/mm 小松动间隙 1.4×10-3 8×10-4 2×10-4 2×10-4 大松动间隙 7×10-3 4×10-3 2×10-3 2×10-3
下载: 导出CSV
-
[1] 于欢, 马艳红, 肖森, 等.高速柔性转子支承松动力学特征及动力特性[J].北京航空航天大学学报, 2017, 43(8):1677-1683.YU H, MA Y H, XIAO S, et al.Mechanical and dynamic cha-racteristics of bearing with looseness on high-speed flexible rotor[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(8):1677-1683(in Chinese). [2] WANG R, GUO X, WANG Y.Nonlinear analysis of rotor system supported by oil lubricated bearings subjected to base movements[J]. Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2016, 230(4):167-172. [3] HUSSIEN M, AL-WEDYAN H, TAHAT M S, et al.The behaviour of the Jeffcott rotor under a vibrating base of fluid film bearing[J]. Suranree Journal of Science and Technology, 2008, 15(3):167-176. [4] GOLDMAN P, MUSZYNSKA A.Chaotic behavior of rotor-stator systems with rubs[J]. Journal of Engineering for Gas Turbines and Power, 1994, 116(3):692-701. [5] GOLDMAN P, MUSZYNKA A.Dynamic effects in mechanical structures with gap and impacting:Order and chaos[J]. Journal of Vibration and Acoustics, 1994, 116(4):541-547. [6] GOLDMAN P, MUSZYNKA A.Chaotic response of unbalanced rotor/bearing/stator systems with looseness or rubs[J]. Chaos, Solitons & Fractals, 1995, 5(9):1682-1704. [7] KARPENKO E V, WIERCIGROCH M, PAVLOVSKAIA E E, et al.Piecewise approximate analytical solutions for a Jeffcott rotor with a snubber ring[J]. International Journal of Mechanical Sciences, 2002, 44(3):475-488. [8] KARPENKO E V, WIERCIGROCH M, CARTMELL M P.Re-gular and chaotic dynamics of a discontinuously nonlinear rotor system[J]. Chaos, Solitons & Fractals, 2002, 13(6):1231-1242. [9] KIM Y B, NOAH S T.Quasi-periodic response and stability analysis for a non-linear Jeffcott rotor[J]. Journal of Sound and Vibration, 1996, 190(2):239-253. [10] EHRICH F F.High order subharmonic response of high speed rotors in bearing clearance[J]. Journal of Vibration and Acoustics, 1988, 110(1):9-16. [11] EHRICH F F. Subharmonic virbration of rotors in bearing clea-rance: ASME Paper No. 66-MD-1[R]. Ner York: ASME, 1966. [12] KIM Y B, NOAH S T.Bifurcation analysis for a modified Jeffcott rotor with bearing clearances[J]. Nonlinear Dynamics, 1990, 1(3):221-241. [13] CHÁVEZ J P, WIERCIGROCH M.Bifurcation analysis of periodic orbits of a non-smooth Jeffcott rotor model[J]. Communications in Nonlinear Science & Numerical Simulation, 2013, 18(9):2571-2580. [14] WIERCIGROCH M, DE KRAKER B.Applied nonlinear dynamics and chaos of mechanical systems with discontinuities[M]. Singapore:World Scientific, 2000:177-200. [15] INAYAT-HUSSAIN J I, KANKI H, MUREITHI N W.On the bifurcations of a rigid rotor response in squeeze-film dampers[J]. Journal of Fluids & Structures, 2003, 17(3):433-459. [16] INAYAT-HUSSAIN J I, KANKI H, MUREITHI N W.Stability and bifurcation of a rigid rotor in cavitated squeeze-film dam-pers without centering springs[J]. Tribology International, 2001, 34(10):689-702. [17] 刘秉正, 彭建华.非线性动力学[M].北京:高等教育出版社, 2004:132-135.LIU B Z, PNEG J H.Nonlinear dynamics[M]. Beijing:Higher Education Press, 2004:132-135(in Chinese). [18] 赖志慧. 基于Duffing振子混沌和随机共振特性的微弱信号检测方法研究[D]. 天津: 天津大学, 2014.LAI Z H. Weak-signal detection based on the chaotic and stochastic-resonance characteristics of Duffing oscillator[D]. Tianjin: Tianjin University, 2014(in Chinese). -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 1849
- HTML全文浏览量: 328
- PDF下载量: 638
- 被引次数: 0
