



Event-based cooperative control of multiple flight vehicles formation
-
摘要:
针对多飞行器系统协同控制问题,研究了基于事件驱动机制的控制设计方法。结合有向通信拓扑和编队位置描述建立了空间多飞行器系统的模型,在飞行器编队中引入事件驱动方法,设计了一般形式的事件触发函数,在非触发时间内利用触发时刻的信息生成了协同控制律,使得飞行器在非持续通信下能够形成三维空间任意给定的队形,并从理论上给出了协同控制问题的稳定性证明。提出的方法不需要飞行器系统的全局信息,飞行器只需要在触发时刻进行通信和控制器的更新,更有利于实际情形中的应用。仿真结果验证了该方法的有效性。
Abstract:This paper is concerned with the cooperative control problem of multiple flight vehicles, and an event-based control policy is investigated. The multiple flight vehicle system is modeled involving directed graph and relative position in the formation. By designing a general trigger function, the states at trigger time are employed to construct the consensus protocol for formation at non-trigger time. The three-dimensional formation can be achieved under non-continuous communication driven by events, and its stability is analyzed in this paper. The overall information is unnecessary in the proposed method. Instead, the information exchange is conducted only at trigger time. Then the controller of each flight vehicle is updated, which could be more applicable to practical situations. A flight formation example is given to illustrate the effectiveness of the proposed method.
-

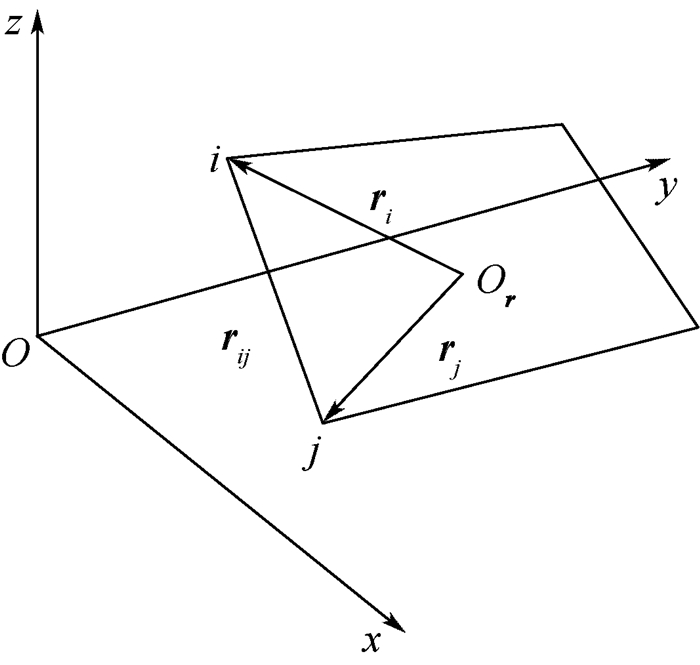
图 1 飞行器空间相对位置描述
Figure 1. Illustration of relative spatial positions between flight vehicles
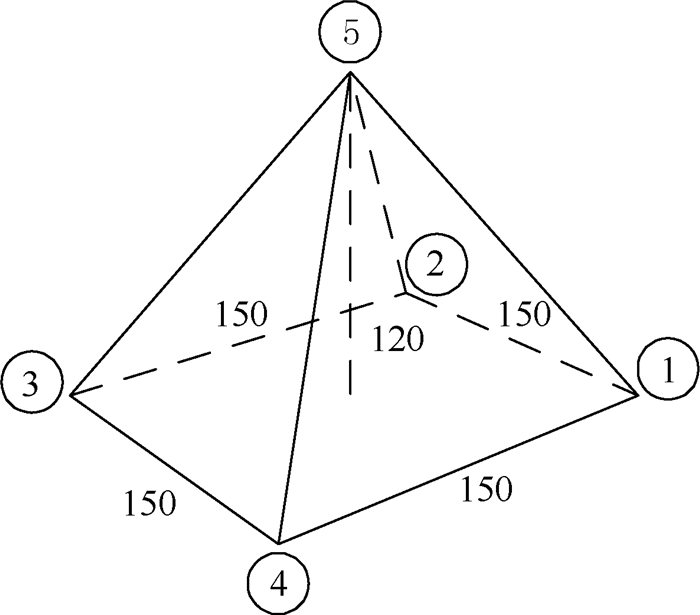
表 1 飞行器初始状态
Table 1. Initial conditions of flight vehicles
飞行器 位置/m 速度/(m·s-1) 航迹偏角/(°) 航迹倾角/(°) 1 (0, 0, 39) 63.2 5.1 18.4 2 (43, -55, 0) 59.8 21.8 25.7 3 (117, 19, -40) 72.1 56.3 0 4 (80, 0, -20) 58.4 69.6 -9.8 5 (100, -78, 0) 72.2 88.3 14.4  下载: 导出CSV
下载: 导出CSV
表 2 不同触发参数结果对比
Table 2. Results comparison of different trigger parameters
情形 触发函数参数 (δ0i, δ1i, σi) 飞行器1~5的触发次数 收敛时间/s 1 (-3, -0.7, 0.05) 43, 41, 41, 42, 42 23.76 2 (-5, -0.7, 0.05) 26, 29, 30, 30, 31 24.47 3 (-5, -0.7, 0.03) 22, 24, 25, 26, 26 24.70 4 (-3, -0.1, 0.05) 59, 55, 55, 56, 57 23.49 文献[12] 22.95
下载: 导出CSV
-
[1] 李文皓, 张珩.无人机编队飞行技术的研究现状与展望[J].飞行力学, 2007, 25(1):9-11. http://www.cnki.com.cn/Article/CJFDTOTAL-FHLX200701002.htmLI W H, ZHANG H.Reviews on unmanned aerial vehicle formation-flight[J].Flight Dynamics, 2007, 25(1):9-11(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-FHLX200701002.htm [2] OH K K, PARK M C, AHN H S.A survey of multi-agent formation control[J].Automatica, 2015, 53:424-440. [3] 樊琼剑, 杨忠, 方挺, 等.多无人机协同编队飞行控制的研究现状[J].航空学报, 2009, 30(4):683-691. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200904020.htmFAN Q J, YANG Z, FANG T, et al.Research status of coordinated formation flight control for multi-UAVs[J].Acta Aeronautica et Astronautica Sinica, 2009, 30(4):683-691(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200904020.htm [4] 罗德林, 张海洋, 谢荣增, 等.基于多agent系统的大规模无人机集群对抗[J].控制理论与应用, 2015, 32(11):1498-1504. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201511010.htmLUO D L, ZHANG H Y, XIE R Z, et al.Unmanned aerial vehicles swarm conflict based on multi-agent system[J].Control Theory & Applications, 2015, 32(11):1498-1504(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201511010.htm [5] 徐肖豪, 孟令航, 赵嶷飞.基于几何方法的洲际航空编队飞行路径规划[J].北京航空航天大学学报, 2015, 41(7):1155-1164.XU X H, MENG L H, ZHAO Y F.Geometric approach for intercontinental formation flight path planning[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(7):1155-1164(in Chinese). [6] 王祥科, 李迅, 郑志强.多智能体系统编队控制相关问题研究综述[J].控制与决策, 2013, 28(11):1601-1613. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311001.htmWANG X K, LI X, ZHENG Z Q.Survey of developments on multi-agent formation control related problems[J].Control and Decision, 2013, 28(11):1601-1613(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311001.htm [7] RUDY C G, NEJAT O.Stability of formation control using a consensus protocol under directed communications with two time delays and delay scheduling[J].International Journal of Systems Science, 2016, 47(2):433-449. [8] 邵龙飞, 师鹏, 赵育善.电磁航天器编队动力学建模与运动规划方法[J].北京航空航天大学学报, 2015, 41(4):738-743.SHAO L F, SHI P, ZHAO Y S.Dynamics modeling and motion programming for electromagnetic formation flight[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(4):738-743(in Chinese). [9] 马培蓓, 纪军.多导弹三维编队控制[J].航空学报, 2010, 31(8):1660-1666. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201008024.htmMA P B, JI J.Three-dimensional multi-missile formation control[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(8):1660-1666(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201008024.htm [10] 崔艳, 贾英民.树型变换下高阶多智能体系统鲁棒一致性方法[J].北京航空航天大学学报, 2013, 39(3):386-390.CUI Y, JIA Y M.Robust consensus approach to high-order multi-agent systems based-on tree-type transformation[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(3):386-390(in Chinese). [11] 邱华鑫, 段海滨, 范彦铭.基于鸽群行为机制的多无人机自主编队[J].控制理论与应用, 2015, 32(10):1298-1304. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201510004.htmQIU H X, DUAN H B, FAN Y M.Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J].Control Theory & Applications, 2015, 32(10):1298-1304(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201510004.htm [12] 薛瑞彬, 宋建梅, 张民强.具有时延及联合连通拓扑的多飞行器分布式协同编队飞行控制研究[J].兵工学报, 2015, 36(3):492-502. http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201503017.htmXUE R B, SONG J M, ZHANG M Q. Research on distributed multi-vehicle coordinated formation flight control with coupling time-delay and jointly-connected topologies[J].Acta Armamentarii, 2015, 36(3):492-502(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201503017.htm [13] HEEMELS W P M H, SANDEE J H, BOSCH P P J V D.Analysis of event-driven controllers for linear systems[J].International Journal of Control, 2008, 81(4):571-590. [14] AL-AREQI S, GÖRGES D, LIU S.Event-based networked control and scheduling codesign with guaranteed performance[J]. Automatica, 2015, 57:128-134. [15] 邵浩宇, 胡爱花.基于事件驱动控制的非线性多智能体的一致性[J].信息与控制, 2015, 44(1):38-42. http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201501007.htmSHAO H Y, HU A H.Consensus of nonlinear multi-agent systems with event-triggered control[J].Information and Control, 2015, 44(1):38-42(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201501007.htm [16] FAN Y, FENG G, WANG Y, et al.Distributed event-triggered control of multi-agent systems with combinational measurements[J]. Automatica, 2013, 49(2):671-675. [17] LIU T, JIANG Z P.Event-based control of nonlinear systems with partial state and output feedback[J].Automatica, 2015, 53:10-22. [18] 王航飞, 禹梅, 谢广明, 等.基于事件驱动的环形编队多智能体系统[J].系统科学与数学, 2014, 34(7):815-827. http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201407005.htmWANG H F, YU M, XIE G M, et al.Event-driven circle formation control for multi-agent systems[J].Journal of Systems Science and Complexity, 2014, 34(7):815-827(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-STYS201407005.htm [19] DIMAROGONAS D V, FRAZZOLI E, JOHANSSON K H. Distributed event-triggered control for multi-agent systems[J]. IEEE Transactions on Automatic Control, 2012, 57(5):1291-1297. [20] KIA S S, CORTÉS J, MARTÍNEZ S.Distributed event-triggered communication for dynamic average consensus in networked systems[J].Automatica, 2015, 59(C):112-119. [21] MENG X, CHEN T.Event based agreement protocols for multi-agent networks[J].Automatica, 2013, 49(7):2125-2132. [22] GARCIA E, CAO Y, CASBEER D W.Decentralized event-triggered consensus with general linear dynamics[J]. Automatica, 2014, 50(10):2633-2640. [23] ZHU W, JIANG Z P, FENG G.Event-based consensus of multi-agent systems with general linear models[J]. Automatica, 2014, 50(2):552-558. [24] 方振平, 陈万春, 张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社, 2005:16-20.FANG Z P, CHEN W C, ZHANG S G.Atmospheric flight dynamics[M]. Beijing:Beihang University Press, 2005:16-20(in Chinese). [25] 张磊, 方洋旺, 刁兴华, 等.多导弹协同攻击编队非线性最优控制器设计[J].北京航空航天大学学报, 2014, 40(3):401-406.ZHANG L, FANG Y W, DIAO X H, et al.Design of nonlinear optimal controller for multi-missile formation[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(3):401-406(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 2115
- HTML全文浏览量: 219
- PDF下载量: 800
- 被引次数: 0
