



Compensation method of in-track coupling effect of cross-track maneuver for formation-flying satellites
-
摘要:
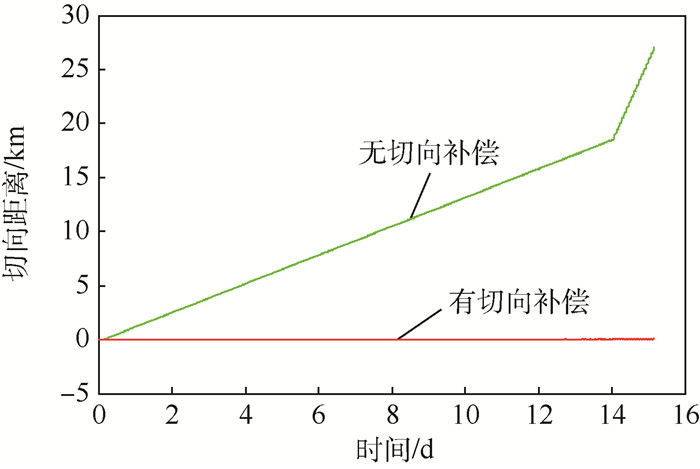
空间四面体构型在空间物理场三维立体协同探测任务中具有重要应用价值。为了保证空间四面体良好的探测性能,必须对空间四面体构型进行构型维持控制。但是,在法向控制中,法向机动的切向耦合效应会导致编队构型发生切向漂移,使得空间四面体几何特性变差,从而影响编队卫星的探测性能。针对编队飞行任务,通过解析的补偿方法消除法向机动时由于耦合效应造成的构型切向漂移,从而实现J2摄动下精确的构型初始化重构和构型保持控制。仿真表明,该方法简单有效,能够有效消除J2摄动下的法向机动引起的构型切向漂移,实现更精确的构型控制。
Abstract:Tetrahedron formation has an important application in the space physical three-dimensional collaborative detection. Formation keeping control must be carried out to guarantee the detecting efficiency. However, the in-track coupling effect of cross-track maneuver can cause the drift along the in-track direction, thus making the deterioration of geometric characteristic, and having a bad effect on the detecting efficiency. An analytical compensation method for formation-flying satellites was designed to eliminate the in-track drift caused by coupling effect of cross-track maneuver, and achieve the accurate formation initialization reconfiguration and formation keeping control under J2 perturbation. The numerical simulation results show that the method is simple and efficient to eliminate the in-track drift caused by cross-track maneuver under J2 perturbation, and can achieve more accurate formation control.
-

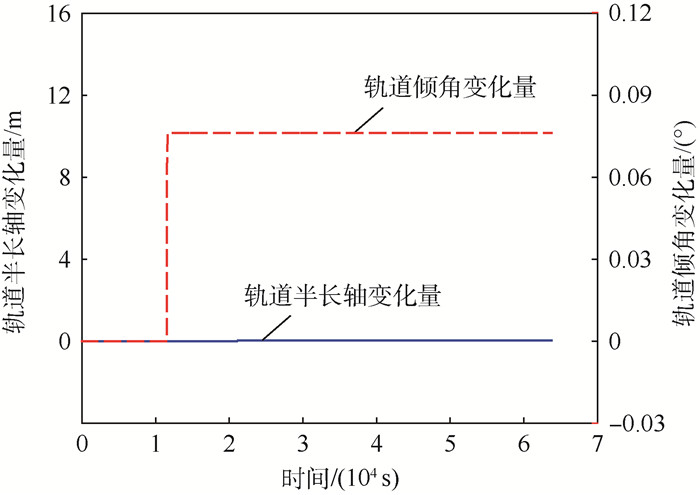
图 2 法向有限推力作用时卫星轨道半长轴和倾角变化量随时间的变化
Figure 2. Variation of orbital semi-major axis and inclination with time for satellite with cross-track finite thrust

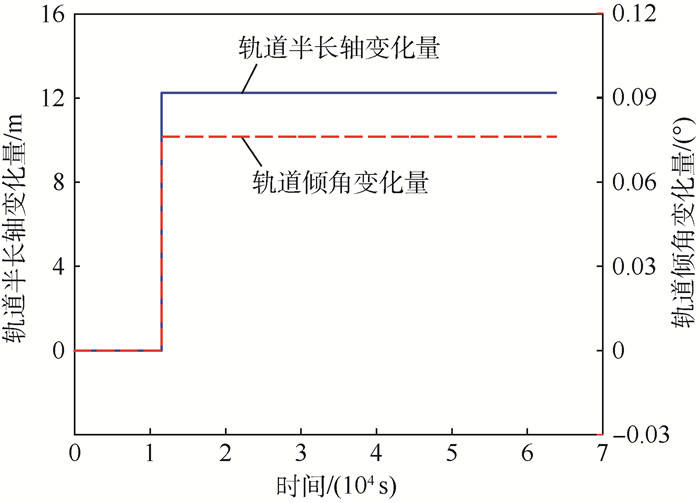
图 3 法向脉冲推力作用时卫星轨道半长轴和倾角变化量随时间的变化
Figure 3. Variation of orbital semi-major axis and inclination with time for satellite with cross-track impulsive thrust

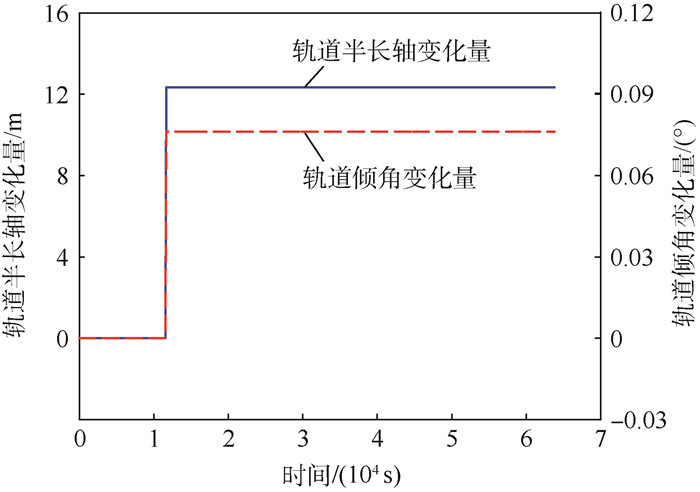
图 4 固定方向推力作用时轨道半长轴和倾角变化量随时间的变化
Figure 4. Variation of orbital semi-major axis and inclination with time for satellite with fixed direction thrust
-
[1] ALFRIEND K T, VADALI S R, GURFIL P.Spacecraft formation flying:Dynamics, control and navigation[M].New York:Oxford University Press, 2010:6-7. [2] 曹喜滨, 张锦绣, 王峰.航天器编队动力学与控制[M].北京:国防工业出版社, 2013:1-4.CAO X B, ZHANG J X, WANG F.The dynamics and control of spacecraft formation flying[M].Beijing:National Defense Industry Press, 2013:1-4(in Chinese). [3] 杨震, 孟新, 牛文龙, 等.多航天器协同探测星簇构型探测效能的评价方法[J].宇航学报, 2015, 36(9):981-987. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201509001.htmYANG Z, MENG X, NIU W L, et al.An evaluation method for multi-spacecraft formation detection efficiency[J].Journal of Astronautics, 2015, 36(9):981-987(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201509001.htm [4] CAILLIBOT E P, GRANT C C, KEKEZ D D, et al.Formation flying demonstration missions enabled by CanX nanosatellite[C]//Proceeding of 19th Annual AIAA/USU Conference on Small Satellite.Reston:AIAA, 2005:1-9. [5] GILL E, SUNDARAMOORTHY P, BOUWMEESTER J, et al.Formation flying within a constellation of nano-satellite:The QB50 mission[J].Acta Astronautica, 2013, 82(1):110-117. [6] HALL L. Edison demonstration of smallsat networks (EDSN)[EB/OL].Moffett Field, CA:NASA Ames Research Center, 2013(2015-11-25)[2016-05-21]. [7] 杨乐平, 朱彦伟, 黄涣.航天器相对运动轨迹规划与控制[M].北京:北京国防工业出版社, 2010:104-107.YANG L P, ZHU Y W, HUANG H.Spacecraft relative trajectory planning and control[M].Beijing:National Defense Industry Press, 2010:104-107(in Chinese). [8] SCHAUB H, ALFRIEND K T.J2 invariant relative orbits for spacecraft formations[J].Celestial Mechanics and Dynamical Astronomy, 2001, 79(2):77-95. [9] 刘鲁华, 孟云鹤, 安雪滢.航天器相对运动轨道动力学与控制[M].北京:中国宇航出版社, 2013:93-94.LIU L H, MENG Y H, AN X Y.The dynamics and control of spacecraft relative motion[M].Beijing:China Astronautic Publishing House, 2013:93-94(in Chinese). [10] BREGER L, HOW J P.J2-modified GVE-based MPC for formation flying spacecraft[C]//AIAA Guidance, Navigation and Control Conference and Exhibit.Reston:AIAA, 2005:1-12. [11] VADALI S R, ALFRIEND K T, VADALI S R, et al.Formation establishment and reconfiguration using impulsive control[J].Journal of Guidance, Control, and Dynamics, 2005, 28(2):262-268. [12] CLOHESSY W H, WILTSHIRE R S.Terminal guidance system for satellite rendezvous[J].Journal of the Aerospace Sciences, 1960, 27(5):653-674. [13] LAWDON D F.Optimal trajectories for space navigation[M].London:Butterworths, 1963:79-84. [14] 张玉锟, 戴金海.考虑J2项摄动的卫星编队飞行[J].国防科技大学学报, 2002, 24(2):6-10. http://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ200202001.htmZHANG Y K, DAI J H.Satellite formation flying with J2 perturbation[J].Journal of National University of Defense Technology, 2002, 24(2):6-10(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ200202001.htm [15] 雷博持, 郑建华, 李明涛.椭圆轨道编队构型的初始化控制研究[J].空间科学学报, 2015, 35(1):86-93. http://www.cnki.com.cn/Article/CJFDTOTAL-KJKB201501011.htmLEI B C, ZHENG J H, LI M T.Research on formation initialization control for elliptic reference orbit[J].Chinese Journal of Space Science, 2015, 35(1):86-93(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KJKB201501011.htm -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 1464
- HTML全文浏览量: 241
- PDF下载量: 531
- 被引次数: 0
