



GNSS sea surface reflection signal modeling method based on principle of bistatic radar
-
摘要:
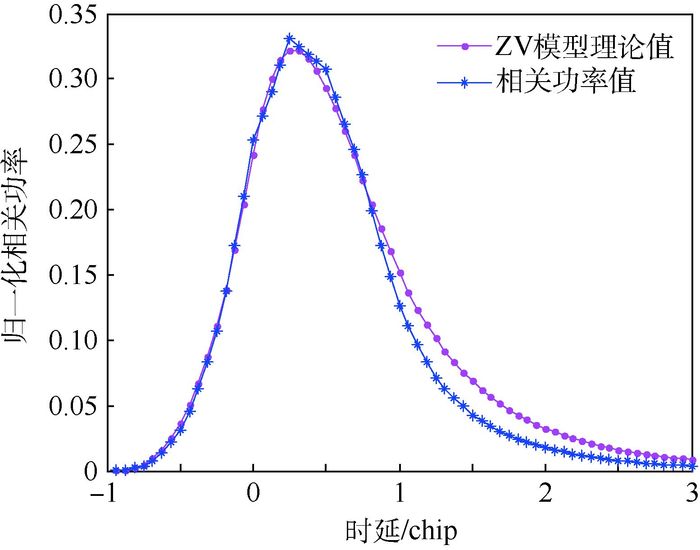
全球导航卫星系统反射(GNSS-R)技术应用过程中接收机的测试验证需要反射信号产生源,以降低成本。信号的模型是GNSS-R信号产生源中的核心。针对缺乏相应模型的问题,提出了一种根据双基雷达原理建立GNSS海面反射信号模型的方法。首先,在分析GNSS海面反射信号特征的基础上,选取了恰当的海面反射点。然后,计算了雷达方程中的散射系数和散射面积,从而得到相应反射点的反射信号功率。最后,对所求得的反射信号参数进行仿真验证。验证的结果表明,反射信号的相关功率曲线与ZV模型理论曲线的相关系数优于0.98,能够有效地用于GNSS海面反射信号的生成。因此,该方法可为GNSS-R信号产生源的研制提供一定的理论支撑。
-
关键词:
- 全球导航卫星系统(GNSS) /
- 反射信号 /
- 双基雷达 /
- ZV模型 /
- 相关功率
Abstract:In the application of global navigation satellite system-reflection(GNSS-R) technology, the reflection signal source is needed to test the receiver in order to reduce costs. The signal model is the core of GNSS-R signal source. In order to solve the problem of the lack of corresponding model, this paper presents a method of establishing GNSS sea surface reflection signal model based on the principle of bistatic radar. First, on the basis of analyzing the characteristics of GNSS sea surface reflection signal, sea surface reflection points were selected. Then, the scattering coefficient and the scattering area in the radar equation were calculated. Thus, the reflected signal power in corresponding reflection point was obtained. Finally, reflection signal parameters are simulated and verified. The simulation results indicate that the correlation coefficient of the signal correlation power curve and the theoretical curve of the ZV model is better than 0.98, which can be used to generate the GNSS ocean reflection signal effectively. The approach is of important reference significance for the theory and the development of GNSS-R signal generator.
-

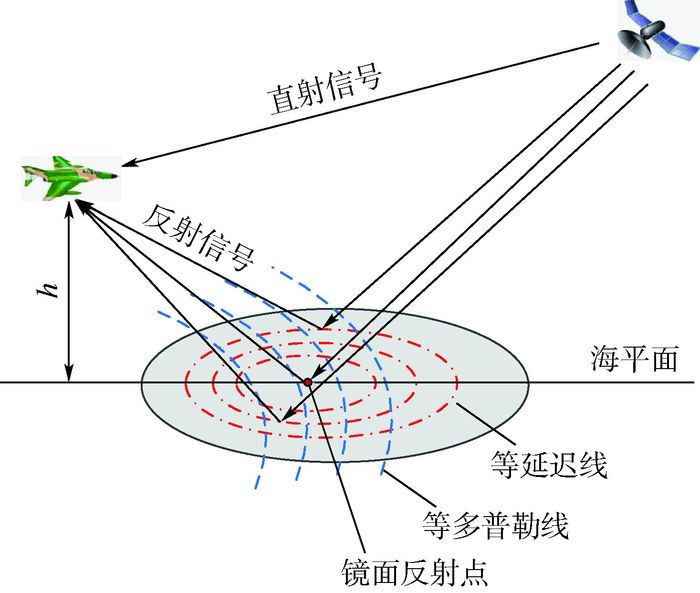
图 1 GNSS海面反射信号传播示意图
Figure 1. Schematic diagram of GNSS sea surface reflection signal propagation

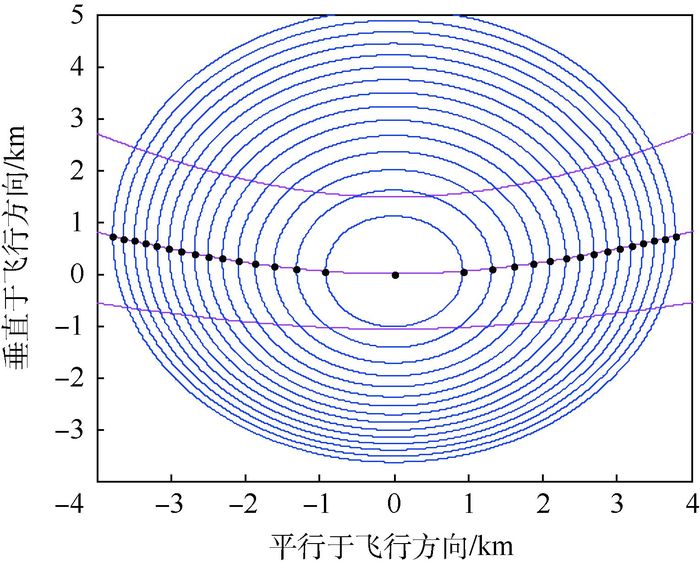
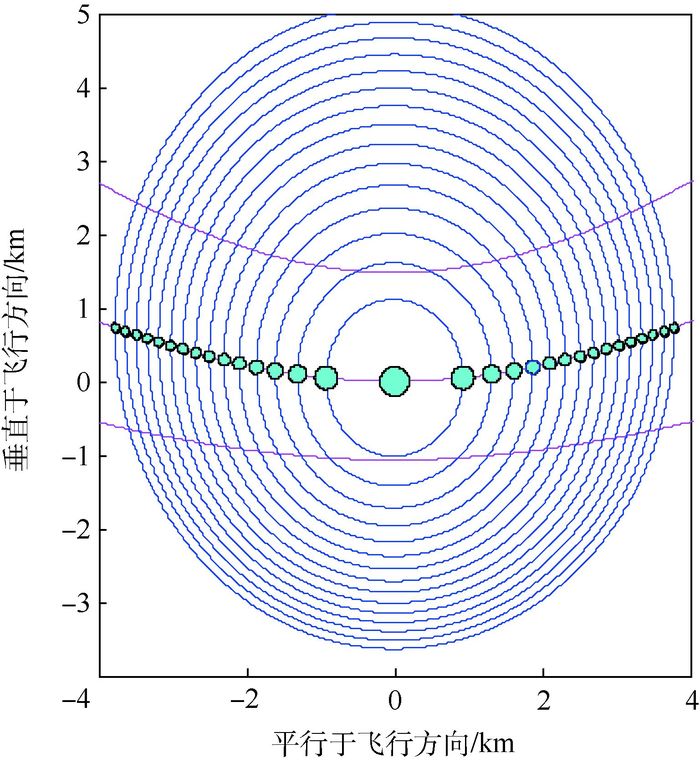
图 3 反射单元与时延-多普勒单元的对应关系
Figure 3. Correspondence between reflection unit and delay-Doppler unit
-
[1] CAMPS A, MARCHAN-HERNANDEZ J F, BOSCH-LLUIS X, et al. Review of GNSS-R instruments and tools developed at the Universitat Politecnica de Catalunya-Barcelona tech[C]//2014 IEEE Geoscience and Remote Sensing Symposium (IGARSS).Piscataway, NJ:IEEE Press, 2014:3826-3829. [2] SCHIAVULLI D, GHAVIDEL A, CAMPS A, et al. GNSS-R wind-dependent polarimetric signature over the ocean[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(12):2374-2378. [3] YAN Q Y, HUANG W M.Spaceborne GNSS-R sea ice detection using delay-Doppler maps:First results from the U.K.TechDemo-Sat-1 mission[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(10):1-7. [4] KAINULAINEN J, RAUTIAINEN K, LEMMETYINEN J, et al.Detection of a sea surface salinity gradient using data sets of airborne synthetic aperture radiometer HUT-2-D and a GNSS-R instrument[J].IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(11):4561-4571. [5] LOWE S T, KROGER P, FRANKLIN G, et al.A delay/Doppler-mapping receiver system for GPS-reflection remote sensing[J].IEEE Transactions on Geoscience and Remote Sensing, 2002, 40(5):1150-1164. [6] YOU H, GARRISON J L, HECKLER G, et al.The autocorrelation of waveforms generated from ocean-scattered GPS signals[J].IEEE Geoscience and Remote Sensing Letters, 2006, 3(1):78-82. [7] CARDELLACH E, RUFFINI G, PINO D, et al.Mediterranean balloon experiment:Ocean wind speed sensing from the stratosphere, using GPS reflections[J].Remote Sensing of Environment, 2003, 88(3):351-362. [8] LI W Q, YANG D K, ZHANG B. Real-time processing of reflected GNSS signal for remote sensing:System and experiments[J].The Journal of Navigation, 2011, 64(S1):127-140. [9] 杨东凯, 王烨.全球导航卫星系统反射信号几何关系数值分析[J].电波科学学报, 2012, 27(4):637-643. http://www.cnki.com.cn/Article/CJFDTOTAL-DBKX201204002.htmYANG D K, WANG Y.Numerical analysis on geometric relationship of the global navigation satellite system reflectometry[J].Chinese Journal of Radio Science, 2012, 27(4):637-643(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DBKX201204002.htm [10] GEORGE A H, ZUFFADA C.Theoretical description of a bistatic system for ocean altimetry using the GPS signal[J].Radio Science, 2003, 38(5):10-19. [11] 杨东凯, 张其善.GNSS反射信号处理基础与实践[M].北京:电子工业出版社, 2012:164-174.YANG D K, ZHANG Q S.GNSS reflected signal processing:Fundamentals and applications[M].Beijing:Publishing House of Electronics Industry, 2012:164-174(in Chinese). [12] 丁鹭飞, 耿富录.雷达原理[M].3版.西安:西安电子科技大学出版社, 2002:128-130.DING L F, GENG F L.Principle of radar[M].3rd ed.Xi'an:Xidian University Press, 2002:128-130(in Chinese). [13] MAURICE W L.Radar reflectivity of land and sea[M].Boston:Artech House, 2001:156-159. [14] ELFOUHAILY T, THOMPSON D R, LINDSTROM L.Delay-Doppler analysis of bistatical reflected signals from the ocean surface:Theory and application[J].IEEE Transactions on Geoscience and Remote Sensing, 2002, 40(3):560-573. [15] ELFOUHAILY T, CHAPRON B, KATSAROS K, et al.A unified directional spectrum for and short wind-driven waves[J].Journal of Geophysical Research, 1997, 104(C7):15781-15796. [16] 杨东凯, 丁文锐, 张其善.软件定义的GNSS反射信号接收机设计[J].北京航空航天大学学报, 2009, 35(9):1048-1051.YANG D K, DING W R, ZHANG Q S.Software defined GNSS reflections receiver design[J].Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(9):1048-1051(in Chinese). [17] ZAVOROTNY V, VORONOVICH A.Scattering of GPS signals from the ocean with wind remote sensing application[J].IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(2):951-964. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 1730
- HTML全文浏览量: 253
- PDF下载量: 552
- 被引次数: 0
