



Autonomous reconfiguration control method for multi-UAV formation based on RQPSO-DMPC
-
摘要:
针对敌方防御区域内各种威胁,为了实现隐蔽突防并实施对敌有效打击,在突防过程中多无人机(UAV)编队需要进行重构控制,并且编队内的相互避碰问题与通信约束问题也需考虑。通过建立无人机虚拟领航编队模型并引入邻居集,采用分布式模型预测控制(DMPC)同时构建多无人机编队的重构代价函数,提出采用改进量子粒子群优化(RQPSO)算法进行求解,并将求解结果与采用粒子群优化算法的结果进行对比。仿真结果表明,本文算法能够有效控制多无人机编队完成自主重构,实现安全隐蔽突防任务。
-
关键词:
- 无人机(UAV) /
- 编队重构 /
- 邻居集 /
- 分布式模型预测控制(DMPC) /
- 量子粒子群
Abstract:For various threats in the enemy defense area, in order to achieve covert penetration and implement effective combat against enemy, the unmanned aerial vehicle (UAV) formation needs to be reconfigured in the process of penetration, and the multi-UAV collision avoidance problem and communication constraint problem within the formation also need be considered. By establishing the virtual leader formation model and introducing the neighbor set, this paper adopts distributed model predictive control (DMPC), reconstructs the cost function of multi-UAV formation reconfiguration, and proposes that the cost function is solved by adopting the revised quantum-behaved particle swarm algorithm. The solving result is compared with the result obtained by particle swarm algorithm. Simulation result shows that this algorithm can control multi-UAV formation' autonomous reconfiguration effectively and achieve covert penetration safely.
-

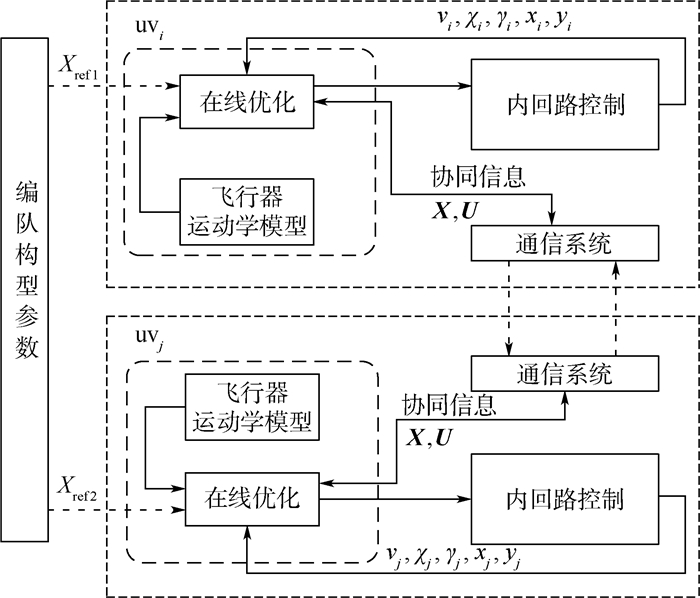
图 7 分布式协同编队构型重构原理框图
Figure 7. Principle block diagram of distributed cooperating formation reconfiguration

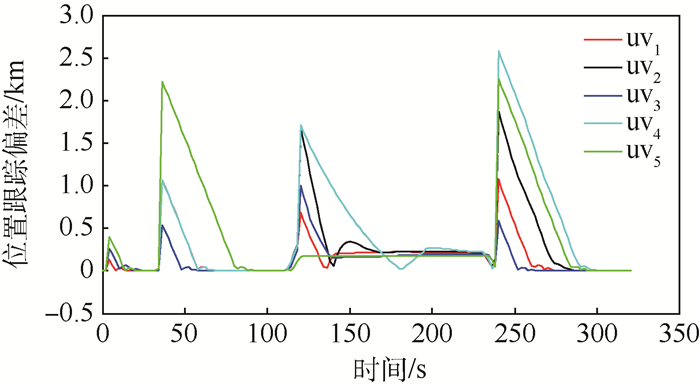
图 10 威胁环境下无人机编队自动构型变换轨迹
Figure 10. Automatic configuration transforming flight trajectory of UAV formation in threatened environment

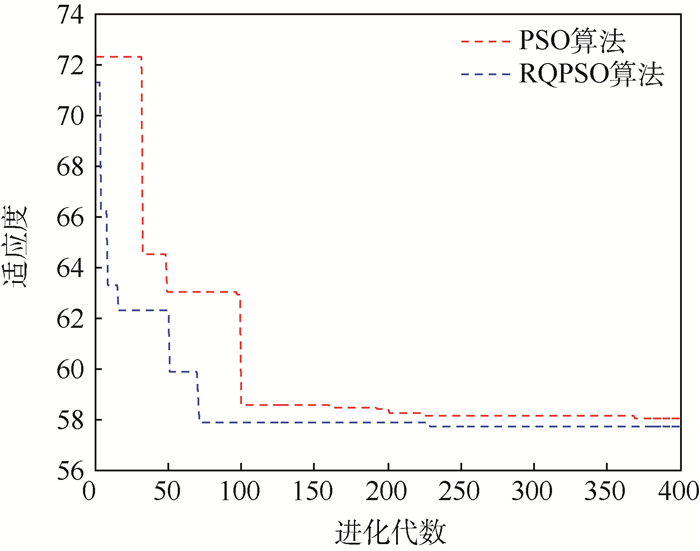
图 15 RQPSO算法与PSO算法收敛速度比较
Figure 15. Comparison of convergence speed between RQPSO and PSO algorithms
表 1 无人机初始运动参数
Table 1. Initial kinematic parameters of UAVs
无人机 (x, y)/km v/(m·s-1) χ/(°) uv1 (3.8, 8.2) 152 90 uv2 (2.8, 7.7) 152 90 uv3 (2.8, 8.7) 152 90 uv4 (1.8, 7.2) 152 90 uv5 (1.8, 9.2) 152 90  下载: 导出CSV
下载: 导出CSV
表 2 参考轨迹参数
Table 2. Parameters of reference trajectory
参数 时间/s 数值 初始位置 0 (2.8, 8.2) km 速度 [0,200] 152m/s 航向 [0,200] 90°
下载: 导出CSV
表 3 编队初始构型参数
Table 3. Parameters of Initial formation configuration
初始坐标 数值 (x1rd,x1rd ) (0,1/sin(π/3)) (x2rd,x2rd ) (0.5,0.5/sin(π/6)) (x3rd,x3rd ) (-0.5,0.5/sin(π/6)) (x4rd,x4rd ) (1,-0.5/cos (π/6)) (x5rd,x5rd ) (-1,-0.5/cos (π/6))
下载: 导出CSV
表 4 敌方威胁参数
Table 4. Parameters of enemy threat
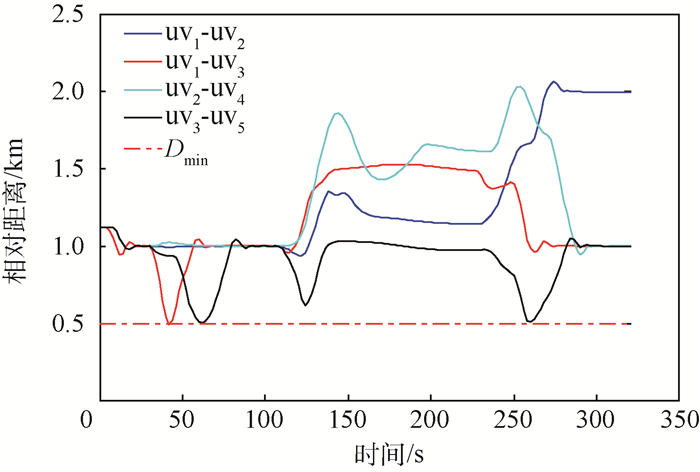
参数 数值 预警雷达坐标/km (30, 20) 预警雷达作用距离/km 20 防空雷达坐标/km (32, 18) 防空雷达作用距离/km 12 防空雷达角度/(°) 10 禁飞区1区间范围/km [(12, 12), (18, 12), (18, 18), (12, 5)] 禁飞区2区间范围/km [(25, 25), (35, 25), (35, 5), (25, 5)] 机间防碰撞距离/km 0.5 最大通信距离/km 2
下载: 导出CSV
-
[1] 王祥科, 李迅, 郑志强.多智能体系统编队控制相关问题研究综述[J].控制与决策, 2013, 28(11):1601-1613. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311001.htmWANG X K, LI X, ZHENG Z Q.Survey of delvelopmrnts on multi-agent formation control related problems[J].Control and Decision, 2013, 28(11):1601-1613(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201311001.htm [2] SCHIANO F, FRANCHI A, DAN Z, et al.A rigidity-based decentralized bearing formation controller for groups of quadrotor UAVs[C]//IEEE/RSJ International Conference on Intelligent Robots and System, 2016:1109-1118. [3] 陈宗基, 张汝麟, 张平, 等.飞行器控制面临的机遇与挑战[J].自动化学报, 2013, 39(6):703-710. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201306004.htmCHEN Z J, ZHANG R L, ZHANG P, et al.Flight control:Challenges and opportunities[J].Acta Automatica Sinica, 2013, 39(6):703-710(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201306004.htm [4] 段海滨, 刘森琪.空中/地面机器人异构协同技术研究:现状和展望[J].中国科学:技术科学, 2010, 40(9):1029-1036. http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201009010.htmDUAN H B, LIU S Q.Unmanned air/ground vehicles heterogeneous cooperative techniques:Current status and prospects[J].Scientia Sinica Technologica, 2010, 40(9):1029-1036(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201009010.htm [5] 朱华勇, 牛轶峰, 沈林成, 等.无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报, 2010, 32(3):115-120. http://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ201003024.htmZHU H Y, NIU Y F, SHEN L C, et al.State of the art and trends of autonomous control of UAV systems[J].Journal of National University of Defense Technology, 2010, 32(3):115-120(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-GFKJ201003024.htm [6] BRUST M R, STRIMBU B M.A networked swarm model for UAV deployment in the assessment of forest environments[C]//2015 IEEE 10th International Conference on Intelligent Sensors, Sensor Networks and Information Processing, 2015. [7] 吕明海, 魏瑞轩, 许卓凡.基于改进微分进化的无人机编队重构安全控制[J].电光与控制, 2014, 21(9):65-70. http://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201409016.htmLU M H, WEI R X, XU Z F.Safety control for UAV formation reconfiguration based on modified differential evolution[J].Electronics Optics & Control, 2014, 21(9):65-70(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201409016.htm [8] 吴清坡, 周绍磊, 周超. 基于粒子群优化的无人飞行器编队分布式协同构型重构控制[C]//2012导航、制导与控制会议, 2012.WU Q P, ZHOU S L, ZHOU C.Distributed cooperative configuration control for UAV based on particle swarm optimization[C]//5th International Congress of Navigation, Guidance and Control, 2012(in Chinese). [9] 茹常剑, 魏瑞轩, 戴静, 等.基于纳什议价的无人机编队自主重构控制方法[J].自动化学报, 2013, 39(8):1349-1360. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201308020.htmRU C J, WEI R X, DAI J, et al.Autonomous reconfiguration control method for UAV's formation based on Nash bargin[J].Acta Automatica Sinica, 2013, 39(8):1349-1360(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201308020.htm [10] 熊伟, 陈宗基, 周锐.运用混合遗传算法的多机编队重构优化方法[J].航空学报, 2008, 29(增刊):S209-S214. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2008S1032.htmXIONG W, CHEN Z J, ZHOU R.Optimization of multiple flight vehicle formation reconfiguration using hybrid genetic algorithm[J].Acta Aeronautica et Astronautica Sinica, 2008, 29(Supl.):S209-S214(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB2008S1032.htm [11] SEO J, KIM Y, TSOURDOS A, et al.Multiple UAV formation reconfiguration with collision avoidance guidance via different geometry concept[C]//28th International Congress of the Aeronautical Sciences, 2016. [12] FERNÁNDEZ-CABALLERO A, BELMONTE L M, MORALES R, et al.Generalized proportional integral control for an unmanned quadrotor system[J].International Journal of Advanced Robotic Systems, 2015, 12(1):1-7. [13] MAYNE D Q, RAWLINGS J B, RAO C V, et al.Constrained model predictive control:Stability and optimality[J].Automatica, 2000, 36(6):789-814. [14] PENI T, VANEK B, SZABO Z, et al.Supervisory fault tolerant control of the GTM UAV using LPV methods[C]//IEEE Control and Fault-Tolerant Systems.Piscataway, NJ:IEEE Press, 2013:655-660. [15] 席裕庚, 李德伟, 林殊.模型预测控制——现状与挑战[J].自动化学报, 2013, 39(3):222-236.XI Y G, LI D W, LIN S.Model predictive control:Status and challenges[J].Acta Automatica Sinica, 2013, 39(3):222-236(in Chinese). [16] 黄海滨, 马广富, 庄宇飞, 等.基于协同进化粒子群和Pareto最优解的卫星编队队形重构方法[J].航空学报, 2011, 32(11):2073-2082. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201111014.htmHUANG H B, MA G F, ZHUANG Y F, et al.Satellite formation reconfiguration using co-evolutionary particle swarm optimization and Pareto optimal solution[J].Acta Aeronautica et Astronautica Sinica, 2011, 32(11):2073-2082(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201111014.htm [17] 金久才, 张杰, 官晟, 等.自推进粒子群的空间同步平行编队控制[J].控制理论与应用, 2011, 28(4):587-590. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201104024.htmJIN J C, ZHANG J, GUAN S, et al.Control for spatial synchronized parallel formation of self-propelled particles[J].Control Theory & Applications, 2011, 28(4):587-590(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201104024.htm [18] 李盼池, 王海英, 宋考平, 等.量子势阱粒子群优化算法的改进研究[J].物理学报, 2012, 61(6):060302-1-060302-6. http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201206005.htmLI P C, WANG H Y, SONG K P, et al.Research on the improvement of quantum potential well-based particle swarm optimization algorithm[J].Acta Physica Sinica, 2012, 61(6):060302-1-060302-6(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201206005.htm [19] 刘朝华, 张英杰, 章兢, 等.基于免疫双态微粒群的混沌系统自抗扰控制[J].物理学报, 2011, 60(1):019501-1-019501-9.LIU C H, ZHANG Y J, ZHANG J, et al.Active disturbance rejection control of a chaotic system based on immune binary-state particle swarm optimization algorithm[J].Acta Physica Sinica, 2011, 60(1):019501-1-019501-9(in Chinese). [20] 张宏立, 宋莉莉.基于量子粒子群算法的混沌系统参数辨识[J].物理学报, 2013, 62(19):190508-1-190508-6.ZHANG H L, SONG L L.Parameter identification in chaotic systems by means of quantum particle swarm optimization[J].Acta Physica Sinica, 2013, 62(19):190508-1-190508-6(in Chinese). [21] 孙俊. 量子行为粒子群优化算法研究[D]. 无锡: 江南大学, 2009.SUN J.Particle swarm optimization with particles having quantum behavior[D].Wuxi:Southern Yangtze University, 2009(in Chinese). [22] 方伟, 孙俊, 谢振平, 等.量子粒子群优化算法的收敛性分析及控制参数研究[J].物理学报, 2010, 59(6):3686-3692.FANG W, SUN J, XIE Z P, et al.Convergence analysis of quantum-behaved particle swarm optimization algorithm and study on its control parameter[J].Acta Physica Sinica, 2010, 59(6):3686-3692(in Chinese). [23] 施展, 陈庆伟.基于改进的多目标量子行为粒子群优化算法的多无人机协同任务分配[J].南京理工大学学报, 2012, 36(6):945-951. http://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201206008.htmSHI Z, CHEN Q W.Cooperative task allocation for multiple UAVs based on improved multi-objective quantum-behaved particle swarm optimization algorithm[J].Journal of Nanjing University of Science and Technology, 2012, 36(6):945-951(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201206008.htm [24] 施展, 陈庆伟.基于量子行为特性粒子群和自适应网格的多目标优化算法[J].信息与控制, 2011, 40(2):214-220. http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201102014.htmSHI Z, CHEN Q W.Multi-objective optimization algorithm based on quantum-behaved particle swarm and adaptive grid[J].Information and Control, 2011, 40(2):214-220(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XXYK201102014.htm [25] 吴祥兴, 陈忠.混沌学导论[M].上海:上海科学技术文献出版社, 1997.WU X X, CHEN Z.Introduction to chaos theory[M].Shanghai:Shanghai Scientific and Technical Literature Press, 1997(in Chinese). [26] REN W.Trajectory tracking control for a mininature fixed-wing unmanned air vehicle[J].International Journal of Systems Science, 2007, 38(4):361-368. [27] 叶水跟. 某型无人机空中阶段控制律设计与仿真[D]. 成都: 电子科技大学, 2011.YE S G.Design and simulation of the control law for a certain UAV in the air phase[D].Chengdu:University of Electronic Science and Technology, 2011(in Chinese). [28] REN W.On contrained nonliear tracking control of a small fixed-wing UAV[J].Journal of Intelligent and Robotic Systems, 2007, 48(4):525-537. [29] REN W, BEARD R W.Distributed consensus in multi-vehicle cooperative control:Theory and applications[M].WU X F, translated.Beijing:Electronic Industry Press, 2014(in Chinese). [30] 周绍磊, 康宇航, 万兵, 等.多无人机协同编队控制的研究现状与发展前景[J].飞航导弹, 2016(1):78-82.ZHOU S L, KANG Y H, WAN B, et al.Research status and development prospect of cooperative control for multiple UAVs[J].Aerodynamic Missile Jounal, 2016(1):78-82(in Chinese). [31] 周超, 王亚峰, 周绍磊, 等.输入状态稳定的鲁棒预测控制[J].控制与决策, 2013, 28(7):58-62.ZHOU C, WANG Y F, ZHOU S L, et al.Robust model predictive control with input-to-state stability[J].Control and Decision, 2013, 28(7):58-62(in Chinese). [32] TRODDEN P, RICHARDS A.Multi-vehicle cooperative search using distributed model predictive control[C]//Proceedings of the AIAA Conference on Guidance, Navigation and Control.Reston:AIAA, 2008:1-11. [33] RIGET J, VESTERSTROEM J.A diversity-guided particle swarm optimizer -The ARPSO:2002-02[R].EVALife Technical Report, 2002. [34] 董娜, 陈增强, 孙青林, 等.基于粒子群优化的有约束模型预测控制器[J].控制理论与应用, 2009, 26(9):965-969. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200909008.htmDONG N, CHEN Z Q, SUN Q L, et al.Particle-swarm optimization algorithm for model predictive control with constrains[J].Control Theory & Applications, 2009, 26(9):965-969(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200909008.htm [35] 张雷, 王道波, 高宇辉, 等.基于粒子群优化的无人战斗机编队任务协调方法研究[J].系统工程与电子技术, 2009, 31(2):439-442. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200902045.htmZHANG L, WANG D B, GAO Y H, et al.Study on uninhabited combat air vehicle formation tasks scheduling method based on particle swarm optimization algorithm[J].Systems Engineering and Electronics, 2009, 31(2):439-442(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD200902045.htm -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 1629
- HTML全文浏览量: 221
- PDF下载量: 771
- 被引次数: 0
