



-
摘要:
针对高超声速飞行器强非线性,强耦合与高度不确定性的特点,提出一种基于高阶跟踪微分器的减步控制方案。将高超声速飞行器纵向模型表达为严反馈形式。在反步法设计框架中,引入跟踪微分器,利用其对给定信号任意阶导数精确估计的能力,计算第1步设计中产生的虚拟控制量的导数,并直接获得第2步实际控制量,从而将设计步骤从3步减少为2步。且在每步设计中将参数不确定性与外部扰动建模为等效干扰,设计扩张状态观测器获得等效干扰估计值,继而在控制器设计中进行补偿。利用Lyapunov方法证明闭环系统稳定性。仿真结果验证了所提控制方案对不确定及干扰的抑制作用,且跟踪精度优于传统动态面方法。
Abstract:Aimed at the strong nonlinearity, complicated couplings and high uncertainties of hypersonic vehicle, a reduced step control scheme based on high-order tracking differentiator is put forward. The longitudinal model of hypersonic vehicle is transformed as strict-feedback form. A tracking differentiator is imported in the backstepping frame. The derivative of virtual control signal in the first step is obtained using the tracking differentiator with its ability of estimating any derivative for a given signal. Also, the actual control signal in the second step is obtained according to the second-order derivative estimation of the tracking differentiator. Thus, the three design steps are reduced into two steps. Moreover, the parameter uncertainties and external disturbances are modeled as equivalent disturbances in each step. Extended state observers are designed to estimate the equivalent disturbances. Then, the equivalent disturbances are compensated in the controller. The Lyapunov theory is used to prove the stability of the closed-loop system. The numerical simulation results show the inhibiting ability of the proposed control scheme against uncertainties and disturbances. And its tracking precision is superior to that of the traditional dynamic surface control method.
-

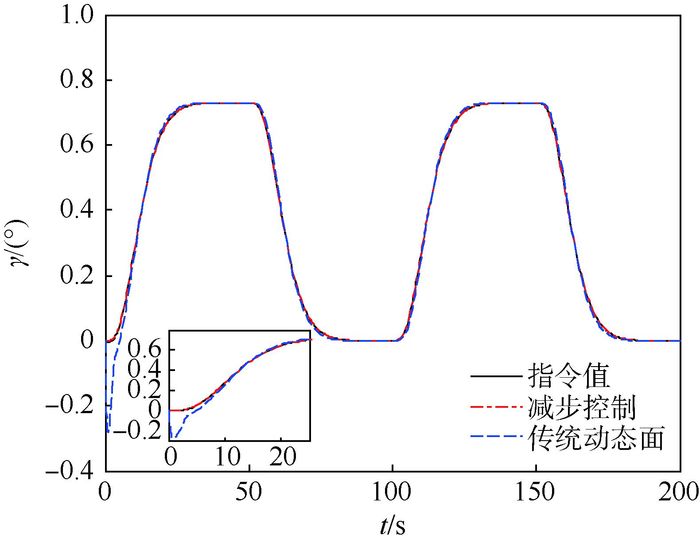
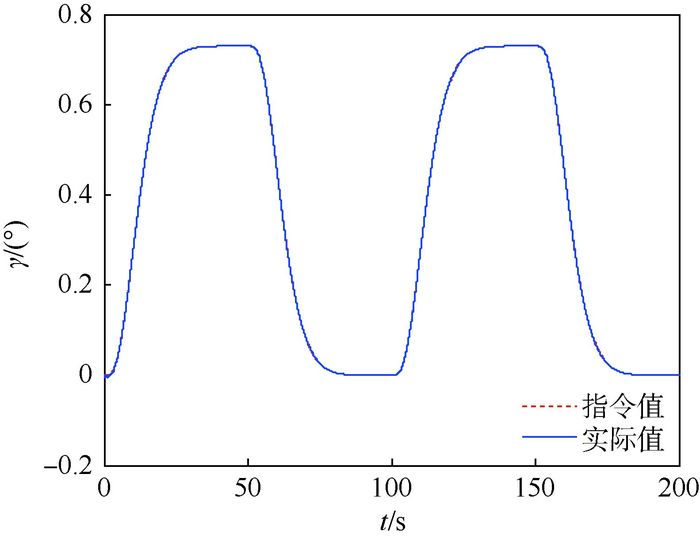
图 1 减步控制方案弹道倾角跟踪曲线
Figure 1. Flight path angle tracking curves with reduced step control scheme

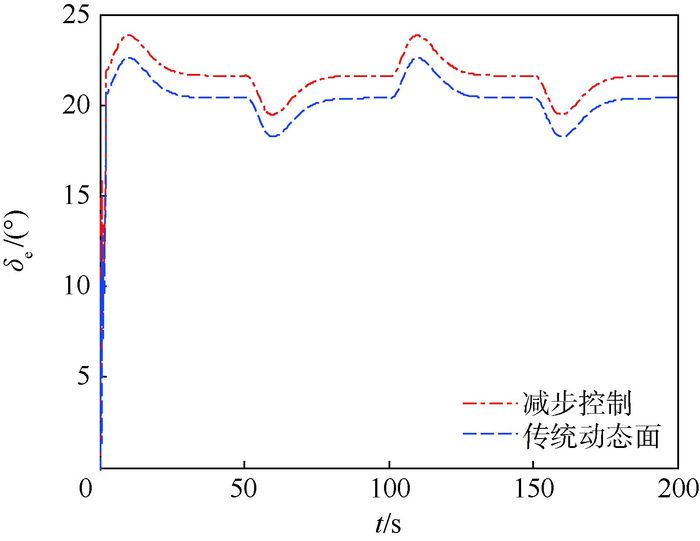
图 2 减步控制方案虚拟控制指令曲线
Figure 2. Virtual control signal curves with reduced step control scheme

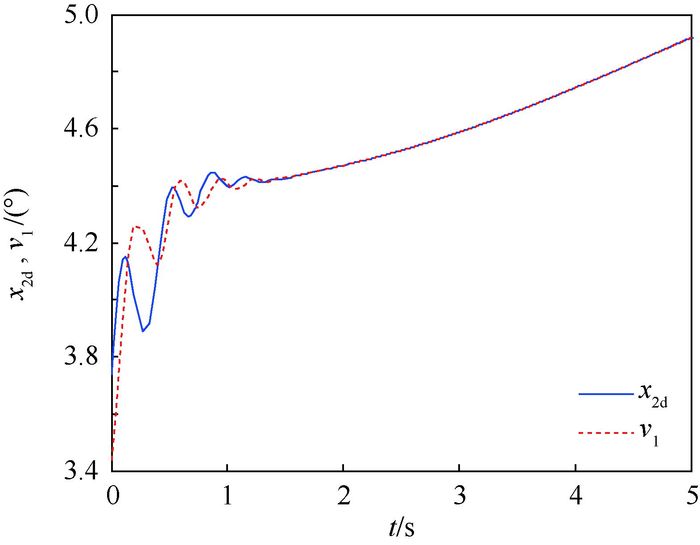
图 3 减步控制方案俯仰角与俯仰角速率跟踪曲线
Figure 3. Pitch angle and pitch angle rate tracking curves with reduced step control scheme

图 7 弹道倾角、俯仰角与俯仰角速率跟踪误差对比
Figure 7. Comparison of flight path angle, pitch angle and pitch angle rate tracking error
-
[1] RODRIGUEZ A A, DICKESON J J, CIFDALOZ O, et al. Modeling and control of scramjet-powered hypersonic vehicles:Challenges, trends, & tradeoffs:AIAA-2008-6793[R].Reston:AIAA, 2008. [2] LAMORTE N, FRIEDMANN P P, DALLE D J, et al.Uncertainty propagation in integrated airframe-propulsion system analysis for hypersonic vehicle[J].Journal of Propulsion and Power, 2015, 31(1):54-68. [3] DICKESON J J, RODRIGUEZ A A, SRIDHARAN S, et al.Control-relevant modeling, analysis, and design for scramjet-powered hypersonic vehicle:AIAA-2009-7287[R].Reston:AIAA, 2009. [4] KARLGARD C D, MARTIN J G, TARTABINI P V, et al.Hyper-X Mach 10 trajectory reconstruction:AIAA-2005-5920[R].Reston:AIAA, 2005. [5] MORELLI E A.Flight test experiment design for characterizing stability and control of hypersonic vehicles[J].Journal of Guidance, Control, and Dynamics, 2009, 32(3):949-959. [6] 孙长银, 穆朝絮, 余瑶.近空间高超声速飞行器控制的几个科学问题研究[J].自动化学报, 2013, 39(11):1901-1913.SUN C Y, MU Z X, YU Y.Some control problem for near space hypersonic vehicles[J].Acta Automatica Sinica, 2013, 39(11):1901-1913(in Chinese). [7] WANG Q, STENGEL R F.Robust nonlinear control of a hypersonic aircraft[J].Journal of Guidance, Control, and Dynamics, 2000, 23(4):577-585. [8] FIORENTINI L, SERRANI A, BOLENDER M A, et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles[J].Journal of Guidance, Control, and Dynamics, 2009, 32(2):401-416. [9] SUN H B, LI S H, SUN C Y.Finite time integral sliding model control of hypersonic vehicles[J].Nonlinear Dynamics, 2013, 73(1/2):229-244. [10] 刘燕斌, 陆宇平.基于反步法的高超音速飞机纵向逆飞行控制[J].控制与决策, 2007, 22(3):313-317. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200703014.htmLIU Y B, LU Y P.Longitudinal inversion flight control based on backstepping for hypersonic vehicle[J].Control and Decision, 2007, 22(3):313-317(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC200703014.htm [11] 黄喜元, 王青, 董朝阳.基于Backstepping的高超声速飞行器鲁棒自适应控制[J].系统工程与电子技术, 2011, 33(6):1321-1326.HUANG X Y, WANG Q, DONG C Y.Robust adaptive control of hypersonic vehicles via Backstepping method[J].Systems Engineering and Electronics, 2011, 33(6):1321-1326(in Chinese). [12] XU B, GAO D X, WANG S X.Adaptive neural control based on HGO for hypersonic flight vehicles[J].Science China Information Sciences, 2011, 54(3):511-520. [13] XU B, FAN Y H, ZHANG S M.Minimal-learning-parameter technique based adaptive neural control of hypersonic flight dynamics without back-stepping[J].Neurocomputing, 2015, 164(C):201-209. [14] SWAROOP D, HEDRICK J K, YIP P P, et al.Dynamic surface control for a class of nonlinear systems[J].IEEE Transactions on Automatic Control, 2000, 45(10):1893-1899. [15] XU B, HUANG X Y, WANG D W, et al.Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation[J].Asian Journal of Control, 2014, 16(1):162-174. [16] WASEEM A B, LIN Y, KENDRICK A S.Adaptive integral dynamic surface control of a hypersonic flight vehicle[J].International Journal of Systems Science, 2015, 46(10):1717-1728. [17] 韩京清, 王伟.非线性跟踪微分器[J].系统科学与数学, 1994, 14(2):177-183.HAN J Q, WANG W.Nonlinear tracking-differentiator[J].Journal of Systems Science and Mathematical Science, 1994, 14(2):177-183(in Chinese). [18] PARKER J T, SERRANI A, YURKOVICH S, et al.Control-oriented modeling of an air-breathing hypersonic vehicle[J].Journal of Guidance, Control, and Dynamics, 2007, 30(3):856-869. [19] XU B, SHI Z K.An overview on flight dynamic and control approaches for hypersonic vehicles[J].Science China Information Sciences, 2015, 58(7):1-19. [20] FIORENTINI L, SERRANI A.Adaptive restricted trajectory tracking for a non-minimum phase hypersonic vehicle model[J].Automatic, 2012, 48(7):1248-1261. [21] GUO B Z, ZHAO Z L.On convergence of tracking differentiator[J].International Journal of Control, 2001, 84(4):693-701. -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 1348
- HTML全文浏览量: 227
- PDF下载量: 485
- 被引次数: 0
