



-
摘要:
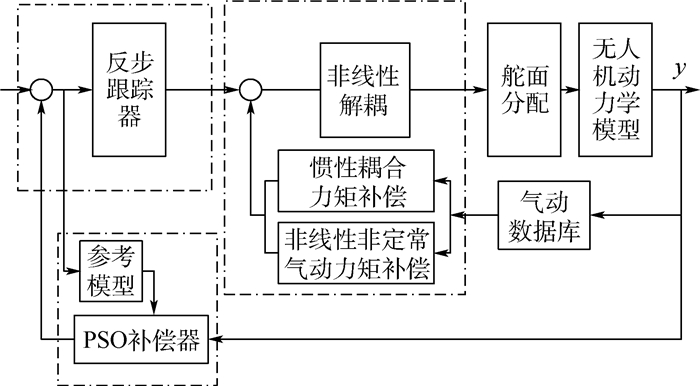
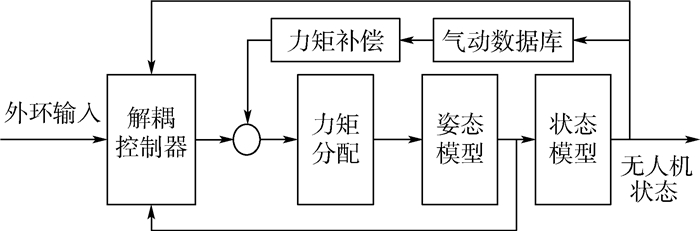
针对飞翼布局无人机操纵能力不足的特点,提出了结合流体矢量(FTV-E)控制技术控制策略。设计了内环补偿器以消除系统不利的耦合项,外环控制器采用了反步跟踪算法,并采用粒子群优化(PSO)补偿器补偿各种扰动和不可建模的耦合项的控制方案,证明了控制结构的稳定性。在传统反步控制方法的基础上,增加了内环补偿器。该内环补偿器保留了对飞行有利的气动阻尼项,降低外环控制器的保守性,方便工程实现。仿真结果显示,该控制方案是有效的。
Abstract:As flying wing UAV lacks manipulating ability, a control strategy combined with fluidic thrust vectoring-turbocharged engine (FTV-E) technology is proposed. In this paper, the control scheme is designed:the inner loop compensator is used to eliminate the negative coupling term of system; the outer loop compensator used backstepping tracking algorithm; the particle swarm optimization (PSO) compensator to compensate the disturbance and coupling term that cannot be modeled. The control structure's stability is proved. Based on the traditional backstepping control methods, the proposed controller increases the inner loop compensator. The proposed inner loop compensator retains the aerodynamic damping term which is favorable to flight. This compensator not only can reduce the conservatism of the outer loop controller, but also is convenient for engineering realization. The simulation results show that the proposed control scheme is effective.
-
Key words:
- FTV-E technology /
- maneuver flight /
- control structure /
- input linearization /
- backstepping control /
- PSO compensator
-

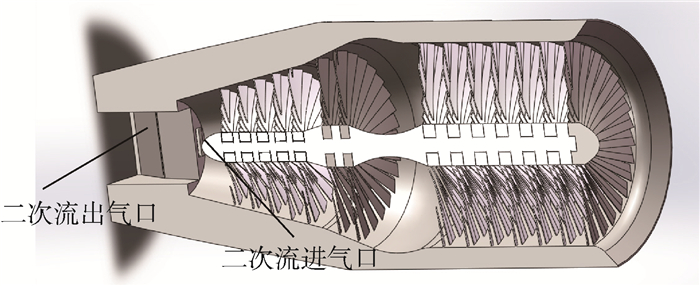
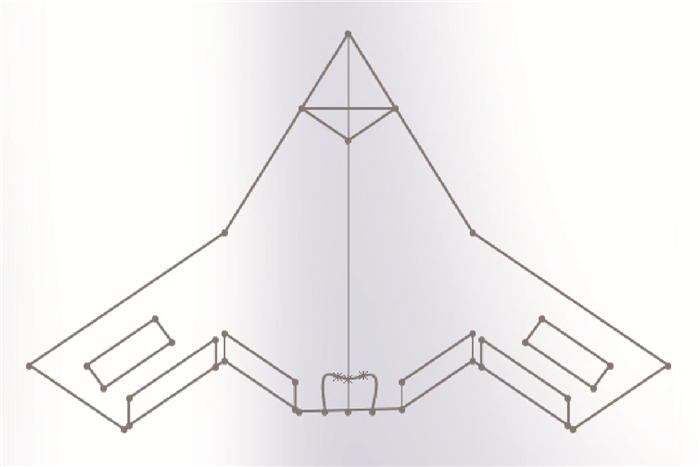
图 2 流体矢量涡轮增压发动机SolidWorks模型
Figure 2. Model of fluidic thrust vectoring-turbochargedengine by SolidWorks
表 1 气动参数偏移幅度
Table 1. Aerodynamic disturbance coefficients
参数 ΔCβL/% ΔCβN/% CpL/% CrN/% ΔL/cm 偏移幅度 15 -10 20 20 1.5  下载: 导出CSV
下载: 导出CSV
-
[1] LAN C E, LI J L, YAU W C, et al. Longitudinal and lateral-directional coupling effects on nonlinear unsteady aerodynamic modeling from flight data[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit. Reston: AIAA, 2013: 394-402. [2] ALIKHAN M, PEYADA N K, GO T H.Flight dynamics and optimization of three-dimensional perching maneuver[J].Journal of Guidance, Control, and Dynamics, 2013, 36(6):1791-1797. [3] GUO Y, YAO Y, WANG S, et al.Maneuver control strategies to maximize prediction errors in ballistic middle phase[J].Journal of Guidance, Control, and Dynamics, 2013, 36(4):1225-1234. [4] ZHI Q, CAI Y L.Energy-management steering maneuver for thrust vector-controlled interceptors[J].Journal of Guidance, Control, and Dynamics, 2012, 35(6):1798-1804. [5] MUELLER J B, GRIESEMER P R, THOMAS S J.Avoidance maneuver planning incorporating station-keeping constraints and automatic relaxation[J].Journal of Aerospace Computing Information & Communication, 2013, 10(6):306-322. [6] NEELY A J, GESTO F N, Young J. Performance studies of shock vector control fluidic thrust vectoring[C]//Proceedings of 43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference. Reston: AIAA, 2007: 1-14. [7] KAREN A D. Summary of fluidic thrust vectoring research conducted at NASA langley research center: AIAA-2003-3800[R]. Reston: AIAA, 2003. [8] SADIQ M U. Performance analysis and flowfield characterization of secondary injection thrust vector control (SITVC) for a 2DCD nozzle[D]. Los Angeles: University of Southern California, 2007: 85-108. [9] 王猛杰, 额日其太, 王强.激波矢量控制喷管落压比影响矢量性能及分离区控制数值模拟[J].航空动力学学报, 2015, 30(3):527-538.WANG M J, ERIQITAI, WANG Q.Numerical simulaton of nozzle pressure ratio effect on vector performance and separation control for shock vector control nozzle[J].Journal of Aerospace Power, 2015, 30(3):527-538(in Chinese). [10] KIRANYAZ S, INCE T, GABBOUJ M.Dynamic data clustering using stochastic approximation driven multi-dimensional particle swarm optimization[J].Lecture Notes in Computer Science, 2010, 22(10):1448-1462. [11] YANG Y, CHEN X, LI C.Transient performance improvement in model reference adaptive control using H∞ optimal method[J].Journal of the Franklin Institute, 2015, 352(1):16-32. [12] 杨艺, 陈欣, 李春涛.一种可保证瞬态特性的改进鲁棒模型参考自适应控制[J].控制与决策, 2015, 30(8):1379-1385.YANG Y, CHEN X, LI C T.A modified robust model reference adaptive controller with guaranteed transient performance[J].Control and Decision, 2015, 30(8):1379-1385(in Chinese). [13] 朱纪洪, 张尚敏, 周池军, 等.飞机超机动状态动力学特征及对控制系统的挑战[J].控制理论与应用, 2014, 31(12):1650-1662.ZHU J H, ZHANG S M, ZHOU C J, et al.Dynamic characteristics and challenges for control system of super-maneuverable aircraft[J].Control Theory & Applications, 2014, 31(12):1650-1662(in Chinese). [14] WILSON J R.UAV worldwide roundup 2007[J].Aerospace America, 2007, 45(5):30-37. [15] OSTERHUBER R. FCS requirements for combat aircraft-lessons learned for future designs[C]//Workshop on Stability & Control, 2011: STO-AVT-189. [16] LI J, CHEN X, LI Z. The attitude decoupling control of the flying wing UAV[C]//Proceedings of IEEE Guidance, Navigation and Control Conference. Piscataway, NJ: IEEE Press, 2017: 357-362. [17] BANKS A, VINCENT J, ANYAKOHA C.A review of particle swarm optimization.Part Ⅱ:Hybridisation, combinatorial, multicriteria and constrained optimization, and indicative applications[J].Natural Computing, 2008, 7(1):109-124. [18] 范成礼, 邢清华, 范海雄, 等.带审敛因子的变邻域粒子群算法[J].控制与决策, 2014, 29(4):696-701.FAN C L, XING Q H, FAN H X, et al.Particle swarm optimization and variable neighborhood search algorithm with convergence criterions[J].Control and Decision.2014, 29(4):696-701(in Chinese). [19] 贾树晋, 杜斌, 岳恒.基于局部搜索与混合多样性策略的多目标粒子群算法[J].控制与决策, 2012, 27(6):813-819.JIA S J, DU B, YUE H.Local search and hybrid diversity strategy based multi-objective particle swarm optimization algorithm[J].Control and Decision, 2012, 27(6);813-819(in Chinese). [20] 李擎, 张超, 陈鹏, 等.一种基于粒子群参数优化的改进蚁群算法[J].控制与决策, 2013, 28(6):873-879.LI Q, ZHANG C, CHEN P, et al.Improved ant colony optimization algorithm based on particle swarm optimization[J].Control and Decision, 2013, 28(6):873-879(in Chinese). [21] POLI R, KENNEDY J, BLACKWELL T.Particle swarm optimization:An overview[J].Swarm Intelligence, 2007, 1:33-57. [22] SOEST W R V, CHU Q P, MULDER J A.Combined feedback linearization and constrained model predictive control for entry flight[J].Journal of Guidance, Control, and Dynamics, 2006, 29(2):427-434. [23] SONNEVELDT L, CHU Q P, MULDER J A.Nonlinear flight control design using constrained adaptive backstepping[J].Journal of Guidance, Control, and Dynamics, 2007, 30(2):322-336. [24] LEE T, KIM Y.Nonlinear adaptive flight control using backstepping and neural networks controller[J].Journal of Guidance, Control, and Dynamics, 2001, 24(4):675-682. [25] SIEBERLING S, CHU Q P, MULDER J A.Robust flight control using incremental nonlinear dynamic inversion and angular acceleration prediction[J].Journal of Guidance, Control, and Dynamics, 2010, 33(6):1732-1742. [26] MACKUNIS W, PATRE P M, KAISER M K, et al.Asymptotic tracking for aircraft via robust and adaptive dynamic inversion methods[J].IEEE Transactions on Control Systems Technology, 2010, 18(6):1448-1456. [27] JOHNSON E N, TURBE M A.Modeling, control, and flight testing of a small-ducted fan aircraft[J].Journal of Guidance, Control, and Dynamics, 2006, 29(4):769-779. [28] XU B, HUANG X, WANG D, et al.Dynamic surface control of constrained hypersonic flight models with parameter estimation and actuator compensation[J].Asian Journal of Control, 2014, 16(1):162-174. [29] 李继广, 陈欣, 王鑫, 等.飞翼无人机机动飞行非线性鲁棒自适应控制[J].系统工程与电子技术, 2017, 39(9):2058-2067.LI J G, CHEN X, WANG X, et al.Nonlinear robust adaptive control of flying wing UAV maneuvering flight[J].Systems Engineering and Electronics, 2017, 39(9):2058-2067(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 2053
- HTML全文浏览量: 535
- PDF下载量: 452
- 被引次数: 0
