



-
摘要:
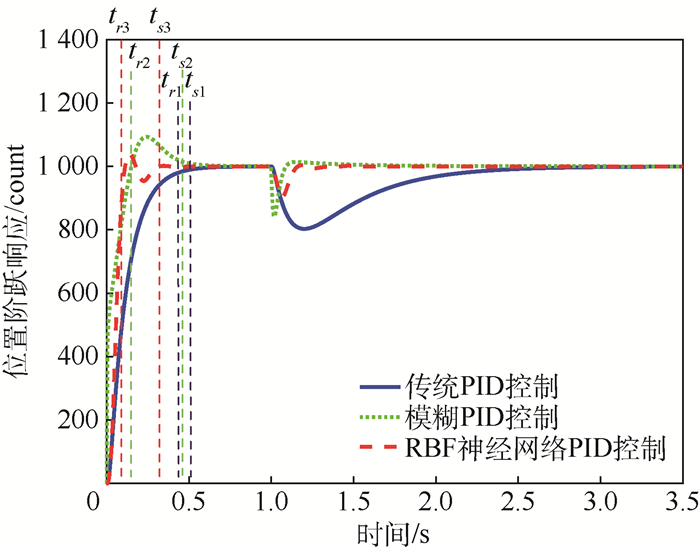
针对通用电机运动控制器(UMAC)下的传统PID控制和现有的模糊PID控制自适应性和鲁棒性较差,伺服系统的动静态性能不理想的问题,将RBF神经网络引入到UMAC的PID参数调节中,增强伺服系统的自适应性和鲁棒性,并提高系统动静态特性。通过UMAC的嵌入式PLC程序对算法进行了实现,位置阶跃响应实验和正弦跟踪实验表明,RBF神经网络PID控制下的伺服电机位置阶跃响应上升时间由传统PID控制下的0.164 s和模糊PID控制下的0.118 s减小到了0.017 s,峰值时间由传统PID控制下的0.196 s和模糊PID控制下的0.131 s减小到了0.023 s,调节时间由传统PID控制下的0.216 s和模糊PID控制下的0.142 s减小到了0.025 s,电机响应速度变快;RBF神经网络PID控制下的伺服电机位置正弦响应动态跟随最大误差由传统PID控制下的188 counts和模糊PID控制下的120 counts减小到了39 counts,且误差波动较小、平稳,伺服电机动态跟随性能显著提高。
-
关键词:
- 通用电机运动控制器(UMAC) /
- RBF神经网络 /
- 自适应性 /
- 鲁棒性 /
- 动静态性能
Abstract:The self-adaptability and robustness of traditional PID control and current fuzzy-PID control adopted by universal motion and automation controller (UMAC) were not strong, and the static-dynamic performance of servosystem controlled by them was not ideal. In this paper, RBF neural network was adopted to automatically adjust PID control parameters, which could strengthen the self-adaptability and robustness of servosystem and improve the controlling characteristics of servo system. This control algorithm was implemented by embedded PLC program of UMAC. The experimental results of step response and sinusoidal tracking response show that the rise time of servo motorposition step response by RBF neural network tuning PID control decreases from 0.164 s by traditional PID control and 0.118 s by fuzzy-PID control to 0.017 s, the peak time decreases from 0.196 s by traditional PID control and 0.131 s by fuzzy-PID control to 0.023 s, and the setting time decreases from 0.216 s by traditional PID control and 0.142 s by fuzzy-PID control to 0.025 s, which mean that the motor responds faster. Meantime, the dynamic following error peak value of motor position sinusoidal response by RBF neural network tuning PID control decreases from 188 counts by traditional PID control and 120 counts by fuzzy-PID control to 39 counts, and the error fluctuation issmall and steady, which mean that the dynamic tracking performance of the motor is significantly improved.
-

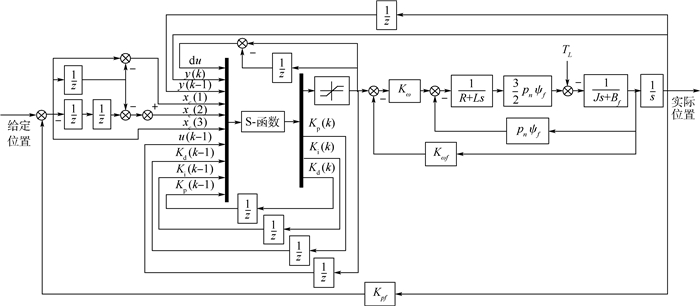
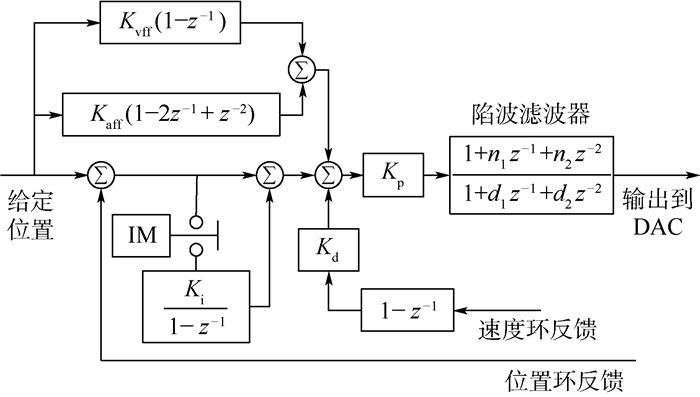
图 4 RBF神经网络PID控制的PMSM伺服仿真模型
Figure 4. Servo simulation model of PMSM based on RBF neural network tuning PID control

图 5 传统PID控制、模糊PID控制、RBF神经网络PID控制下位置阶跃响应曲线
Figure 5. Step response of position by traditional PID control, fuzzy PID control and RBF neural network tuning PID control

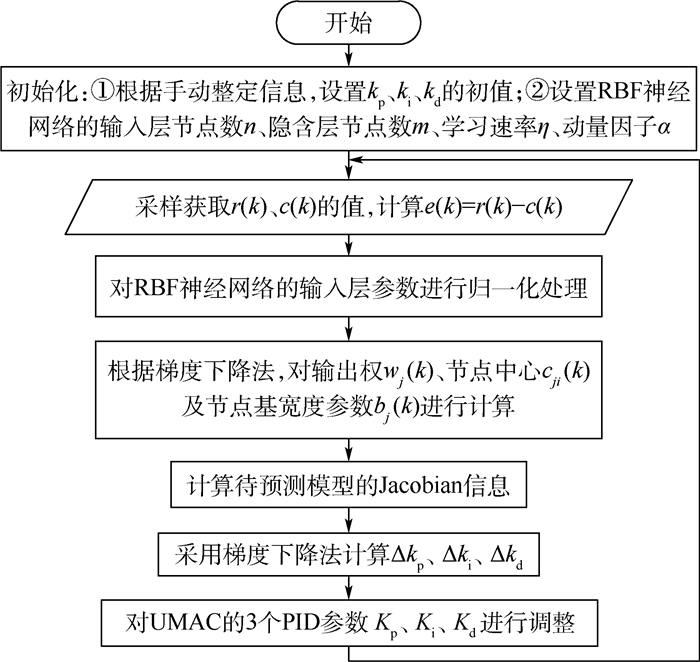
图 7 RBF神经网络PID控制PLC程序流程图
Figure 7. PLC program flowchart of RBF neural network tuning PID control

图 10 给定位置条件下位置阶跃响应曲线
Figure 10. Position step response curves under given position condition
-
[1] 夏链, 俞晓慧, 韩江, 等.基于UMAC的工业机器人运动控制系统设计[J].合肥工业大学学报(自然科学版), 2015, 38(8):1009-1012. doi: 10.3969/j.issn.1003-5060.2015.08.001XIA L, YU X H, HAN J, et al.Design of motion control system of industrial robot based on UMAC[J].Journal of Hefei University of Technology(Natural Science), 2015, 38(8):1009-1012(in Chinese). doi: 10.3969/j.issn.1003-5060.2015.08.001 [2] SPIESER A, IVANOV A.Design of an electrochemical micromachining machine[J].International Journal of Advanced Manufacturing Technology, 2015, 78(5-8):737-752. doi: 10.1007/s00170-014-6332-3 [3] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社, 2011:301-319.LIU J K.MATLAB simulmion of advanced PID control[M].Beijing:Electronic Industry Press, 2011:301-319(in Chinese). [4] 赵凤姣, 厉虹.PID控制器改进方法研究[J].控制工程, 2015, 22(3):425-431. http://d.old.wanfangdata.com.cn/Periodical/jczdh201503011ZHAO F J, LI H.Research on improved methods of PID controller[J].Control Engineering of China, 2015, 22(3):425-431(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jczdh201503011 [5] 廖洪波, 范世珣, 黑墨, 等.光电稳定平台伺服系统动力学建模与参数辨识[J].光学精密工程, 2015, 23(2):477-484. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201502022LIAO H B, FAN S X, HEI M, et al.Modeling and parameter identification for electro-optical stabilized platform servo systems[J].Optics and Precision Engineering, 2015, 23(2):477-484(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201502022 [6] HUANG W L, KUO F C, CHOU S C, et al.High-performance and high-precision servo control of a single-deck dual-axis PMLSM stage[J].International Journal of Advanced Manufacturing Technology, 2017, 90(1-4):865-874. doi: 10.1007/s00170-016-9355-0 [7] 王克选, 李新国.基于PMAC的模糊自整定PID算法设计[J].计算机仿真, 2013, 30(9):331-334. doi: 10.3969/j.issn.1006-9348.2013.09.077WANG K X, LI X G.Design of fuzzy self-regulation PID algorithm based on PMAC[J].Computer Simulation, 2013, 30(9):331-334(in Chinese). doi: 10.3969/j.issn.1006-9348.2013.09.077 [8] 白晶, 于喜红, 秦现生.基于PMAC的码垛机器人模糊PID算法研究[J].机械设计与制造工程, 2016, 45(3):46-49. doi: 10.3969/j.issn.2095-509X.2016.03.010BAI J, YU X H, QIN X S.Study on fuzzy PID algorithm for palletizing robot based on PMAC[J].Machine Design and Manufacturing Engineering, 2016, 45(3):46-49(in Chinese). doi: 10.3969/j.issn.2095-509X.2016.03.010 [9] TIAN C X, LI X W, HU Z.The study of fuzzy self-regulation PID algorithm based on PMAC[J].Machinery & Electronics, 2010, 57(10):60-63. [10] SONG Y, LIU Y, ZHU H.A PMSM speed controller based on RBF neural network and single neuron PID[J].Electronics World, 2017, 38(2):122-126. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzsj201702061 [11] 江维, 吴功平, 曹琪, 等.输电线路带电作业机器人机械手RBF神经网络控制[J].东北大学学报(自然科学版), 2017, 38(10):1388-1393. doi: 10.12068/j.issn.1005-3026.2017.10.005JIANG W, WU G P, CAO Q, et al.RBF neural network control of live operation robot manipulator for high voltage transmission line[J].Journal of Northeastern University(Natural Science), 2017, 38(10):1388-1393(in Chinese). doi: 10.12068/j.issn.1005-3026.2017.10.005 [12] 周佳, 卢少武, 周凤星.伺服位置控制参数的RBF神经网络自整定研究[J].组合机床与自动化加工技术, 2016(3):75-77. http://d.old.wanfangdata.com.cn/Periodical/zhjc201603021ZHOU J, LU S W, ZHOU F X.Study on position control parameters auto-tuning of servo system based on RBF neural network[J].Modular Machine Tool & Automatic Manufacturing Technique, 2016(3):75-77(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zhjc201603021 [13] 舒志兵, 周玮, 李运华.交流伺服运动控制系统[M].北京:清华大学出版社, 2006:66-82.SHU Z B, ZHOU W, LI Y H.AC servo motion control system[M].Beijing:Tsinghua University Press, 2006:66-82(in Chinese). [14] ABU-RUB H, IQBAL A, GUZINSKI J.High performance control of AC drives with MATLAB/Simulink models[M].New York:Wiley, 2012. [15] KUNG Y S, NGUYEN V Q, HUANG C C, et al.Simulink/ModelSim co-simulation of sensorless PMSM speed controller[C]//Industrial Electronics and Applications.Piscataway, NJ: IEEE Press, 2012: 1405-1410. [16] DARKEN C, MOODY J.Fast adaptive k-means clustering: Some empirical results[C]//IJCNN International Joint Conference on Neural Networks.Piscataway, NJ: IEEE Press, 1990: 233-238. [17] 李文鹏.基于UMAC的超精密机床数控系统设计及参数自整定研究[D].哈尔滨: 哈尔滨工业大学, 2016: 45-57.LI W P.Design of ultra-precision machine tool numerical control system and auto-tuning for parameter based on UMAC[D].Harbin: Harbin Institute of Technology, 2016: 45-57(in Chinese). [18] 吴晓明, 马立廷, 郑协, 等.改进的RBF神经网络PID算法在电液伺服系统中应用[J].机床与液压, 2015, 43(11):63-66. doi: 10.3969/j.issn.1001-3881.2015.11.018WU X M, MA L T, ZHENG X, et al.Improved RBF neural network PID control strategy used in electro-hydraulic servo system[J].Machine Tool & Hydraulics, 2015, 43(11):63-66(in Chinese). doi: 10.3969/j.issn.1001-3881.2015.11.018 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 650
- HTML全文浏览量: 158
- PDF下载量: 451
- 被引次数: 0
