



-
摘要:
针对绳系系统离轨稳定控制问题,开展了系绳和绳端卫星构成的绳系系统在拖拽离轨过程中系绳摆动稳定控制方法研究。在考虑拖拽离轨过程中约束下,首先建立了包含绳端卫星的姿态运动的模型,并建立了绳系系统的离轨动力学方程和便于控制器设计的简化动力学方程。其次根据模型预测原理以最优化方法设计参考轨迹,最后以模型预测控制方法为基础设计了稳定系绳摆动的非线性模型预测控制方法。使用MATLAB软件平台仿真,验证了所设计的参考轨迹能完成目标和模型预测控制器有好的跟踪能力。
Abstract:On the stability control of the rope system, a stability control method of tether swing for tethered system consisting of tether and tethered satellites during deorbitting is proposed in this paper. In this paper, a model of motion including satellite attitude motion is eatablished, and the dynamic equation of deorbit tethered system and the simplified equation that is convenient for controller design are proposed. According to the model prediction theory, the reference trajectory is designed by the optimization method, and then the stable tether swing nonlinear model predictive control method is designed based on the model predictive control method in this paper. Then, the feasibility of the designed controller and the reference trajectory are verified by the simulation of MATLAB software platform.
-
Key words:
- tethered system /
- swing control /
- dynamics /
- orbit transfer /
- model predictive control
-

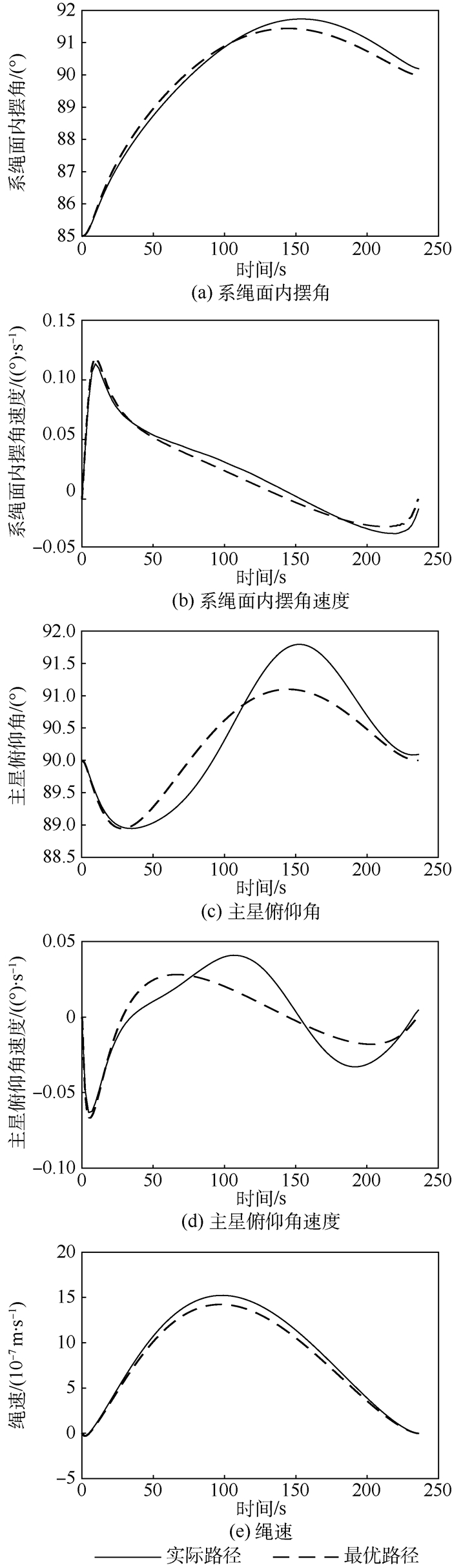
图 2 系绳面内摆角、系绳面内摆角速度、主星俯仰角、主星俯仰角速度和绳速的实际路径和最优路径
Figure 2. Actual path and optimal path of tether's in-plane swing angle, tether's in-plane swing angular velocity, main satellite pitching angle, main satellite pitching angular velocity and tether speed

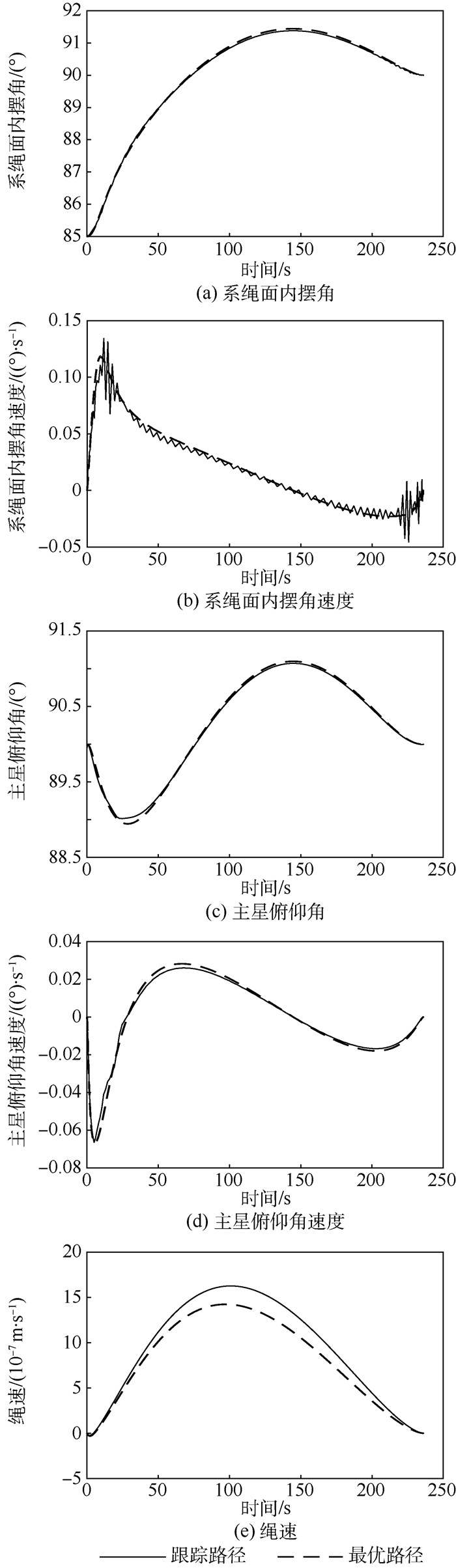
图 3 系绳面内摆角、系绳面内摆角速度、主星俯仰角、主星俯仰角速度和绳速的跟踪路径和最优路径
Figure 3. Tracking path and optimal path of tether's in-plane swing angle, tether's in-plane swing angular velocity, main satellite pitching angle, main satellite pitching angular velocity and tether speed
表 1 绳系系统参数
Table 1. Parameters of tethered system
参数 数值 主星发动机推力/N 100 主星质量/kg 100 主星惯量/(kg·m2) 166.67 拖拽目标质量/kg 8 系绳未拉伸长度/m 200  下载: 导出CSV
下载: 导出CSV
-
[1] 朱仁璋, 雷达, 林华宝.绳系卫星系统复杂模型研究[J].宇航学报, 1999, 20(3):7-12.ZHU R Z, LEI D, LING H B.A sophisticated dynamical model of tethered satellite systems[J]. Journal of Astronautics, 1999, 20(3):7-12(in Chinese). [2] 钟睿, 徐世杰.基于直接配点法的绳系卫星系统变轨控制[J].航空学报, 2010, 31(3):572-578.ZHONG R, XU S J.Orbit-transfer control for TSS using direct collocation method[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3):572-578(in Chinese). [3] XU W, LIANG B, GAO D, et al.A space robotic system used for on-orbit servicing in the geostationary orbit[C]//Proceedings of 2010 International Conference on Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 2010: 4089-4094. [4] MANKALA K K, AGRAWAL S K.Dynamic modeling and simulation of impact in tether net/gripper systems[J]. Multibody System Dynamics, 2004, 11(3):235-250. [5] 刘海涛, 杨乐平, 张青斌, 等.地球静止轨道废弃卫星绳系拖曳离轨研究[J].中国科学:技术科学, 2012, 42(7):780-787.LIU H T, YANG L P, ZHANG Q B, et al.An investigation on tether-tugging de-orbit of defunct geostationary satellites[J]. Scientia Sinica Technologica, 2012, 42(7):780-787(in Chinese). [6] ZHAI G, ZHANG J, YAO Z.Circular orbit target capture using space tether-net system[J]. Mathematical Problems in Engineering, 2013, 2013(4):87-118. [7] QI R, MISRA A K, ZUO Z.Active debris removal using double-tethered space-tug system[J]. Journal of Guidance, Control, and Guidance, 2016, 40(3):1-9. [8] WILLIAMS P.Optimal control of a tethered payload capture maneuver[C]//41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. Reston: AIAA, 2005: 1-23. [9] WEN H, JIN D P, HU H Y.Infinite-horizon control for retrieving a tethered subsatellite via an elastic tether[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(4):899-906. [10] 王晓宇, 金栋平.计入姿态的绳系卫星概周期振动[J].振动工程学报, 2010, 23(4):361-365.WANG X Y, JIN D P.Quasi-periodic oscil lation of a tethered subsatell ite with attitude[J]. Journal of Vibration Engineering, 2010, 23(4):361-365(in Chinese). [11] ZHAO G W, TANG B, SUN L, et al.Effect and control of pendular motion of abandoned satellite on tether drag system[J]. Applied Mechanics & Materials, 2014, 513-517:3900-3906. [12] 赵国伟, 张兴民, 唐斌, 等.空间绳系拖拽系统摆动特性与平稳控制[J].北京航空航天大学学报, 2016, 42(4):694-702.ZHAO G W, ZHANG X M, TANG B, et al.Properties of pendulum motion of tether tugging system and its stable control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(4):694-702(in Chinese). [13] QIN S J, BADGWELL T A.A survey of industrial model predictive control technology[J]. Control Engineering Practice, 2003, 11(7):733-764. [14] 席裕庚, 李德伟, 林姝.模型预测控制——现状与挑战[J].自动化学报, 2013, 39(3):222-236.XI Y G, LI D W, LIN S.Model predictive control-Status and challenges[J]. Acta Automatica Sinica, 2013, 39(3):222-236(in Chinese). [15] 范国伟, 常琳, 戴路, 等.敏捷卫星姿态机动的非线性模型预测控制[J].光学精密工程, 2015, 23(8):2318-2327.FAN G W, CHANG L, DAI L, et al.Nonlinear model predictive control of agile satellite attitude maneuver[J]. Optics and Precision Engineering, 2015, 23(8):2318-2327(in Chinese). [16] LAKSHMANAN P K, MODI V J, MISRA A K.Dynamics and control of the tethered satellite system in the presence of offsets[J]. Acta Astronautica, 1987, 15(12):1053-1057. [17] ZHONG R, ZHU Z H.Timescale separate optimal control of tethered space-tug systems for space-debris removal[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(11):2540-2545. [18] 徐少兵, 李升波, 成波.最优控制问题的Legendre伪谱法求解及其应用[J].控制与决策, 2014, 29(12):2113-2120.XU S B, LI S B, CHENG B.Theory and application of Legendre pseudo-spectral method for solving optimal control problem[J]. Control and Decision, 2014, 29(12):2113-2120(in Chinese). [19] 孙银健.基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D].北京: 北京理工大学, 2015.SUN Y J.Research on model predictive control-based trajectory tracking algorithm for unmanned vehicles[D]. Beijing: Beijing Institute of Technology, 2015(in Chinese). [20] 陈薇.非线性预测控制快速算法的研究与应用[D].合肥: 中国科学技术大学, 2007.CHEN W.Study and application of nonlinear model predictive control fast algorithm[D]. Hefei: University of Science and Technology of China, 2007(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 1314
- HTML全文浏览量: 206
- PDF下载量: 381
- 被引次数: 0
