



Fuel-optimal attitude maneuver using linear pseudo-spectral model predictive control method
-
摘要:
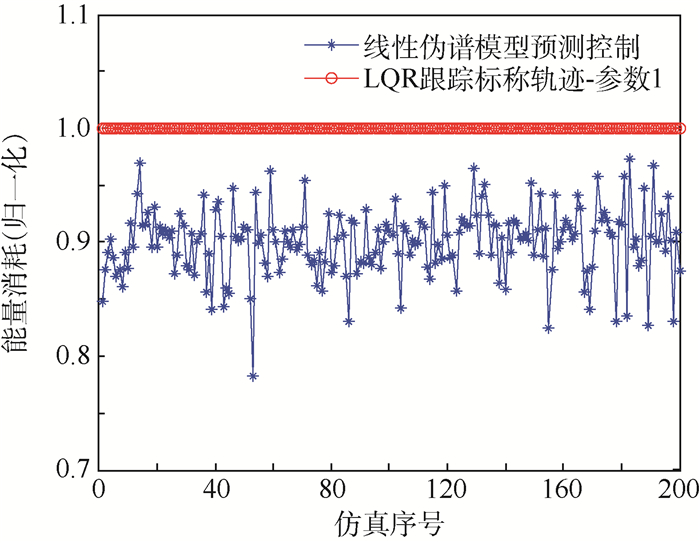
针对大气层外飞行器大角度姿态机动控制问题,提出了一种能量最优的线性伪谱模型预测大角度姿态机动控制方法。首先,通过离线弹道规划获得满足初始、终端约束且能量最优的姿态机动控制轨迹;然后,以离线弹道为基准对姿态动力学方程进行小扰动线性化处理,获得以状态偏差为自变量的线性误差传播方程;最后,以能量最优作为性能指标,通过高斯伪谱法对原问题进行离散,推导获得满足终端偏差修正的控制解析表达式。数值计算和蒙特卡罗仿真表明,该方法不仅计算精度高、求解速度快,满足实时计算要求,而且具有较强的鲁棒性,能够实时消除各种干扰。此外,在同等控制精度条件下,该方法相对传统线性二次型调节器(LQR)跟踪方法,能量消耗减小10%。
Abstract:In order to perform large angle attitude maneuvers of spacecraft outside the atmosphere, we propose a fuel-optimal large angle attitude maneuver strategy using modified linear pseudo-spectral model predictive control method. First, a fuel-optimal attitude maneuver trajectory satisfying initial and terminal constrains is planned offline. Then, the nonlinear equation of motion is linearized under the condition of little perturbation based on the planned trajectory, and thus the linear perturbation propagation equations are obtained. Finally, the analytical solution of fuel-optimal control correction to the planned trajectory has been derivated through the discretization of state variables and control variables using Gauss pseudo-spectral method. Numerical calculation and Monte Carlo simulations were performed to validate the feasibility and effectiveness of the proposed strategy, which can provide real-time control with terminal state satisfied in high accuracy and save almost 10% fuel cost under the same control precision compared with traditional linear quadratic regulator (LQR) tracking method.
-

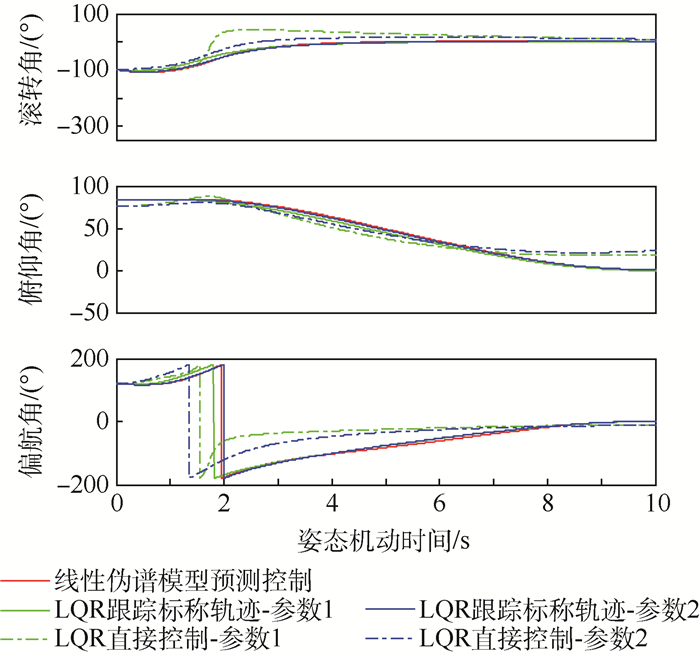
图 2 能量最优姿态机动姿态角仿真曲线
Figure 2. Simulation curves of attitude angles of fuel-optimal attitude maneuvers

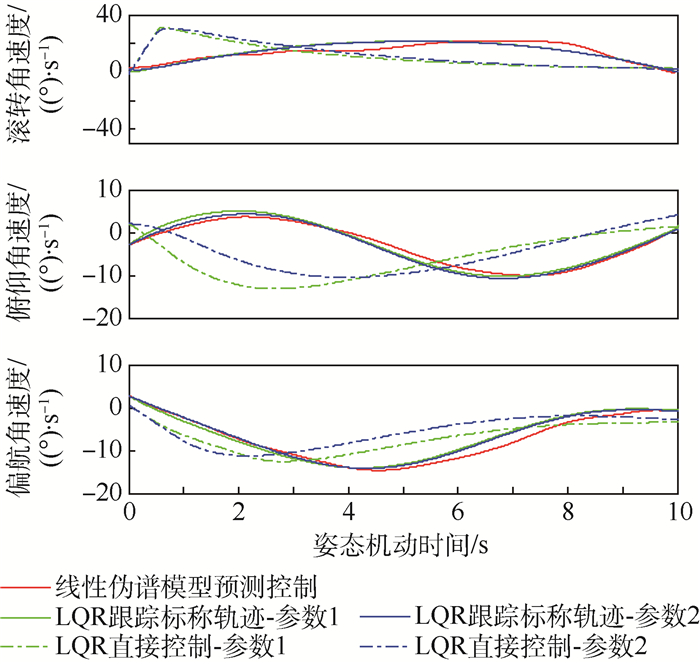
图 3 能量最优姿态机动角速度仿真曲线
Figure 3. Simulation curves of angular velocities of fuel-optimal attitude maneuvers

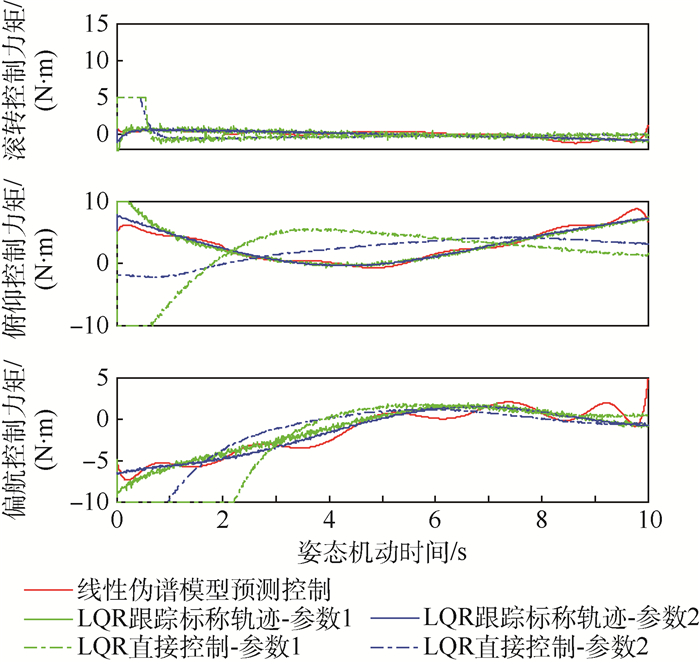
图 4 能量最优姿态机动控制力矩仿真曲线
Figure 4. Simulation curves of control moment of fuel-optimal attitude maneuvers

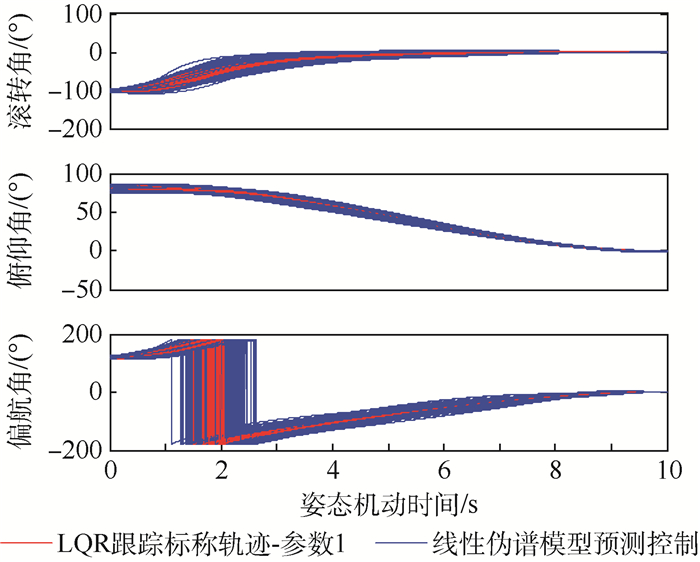
图 5 姿态机动蒙特卡罗仿真姿态角曲线
Figure 5. Curves of attitude angle maneuvers using Monte Carlo simulation

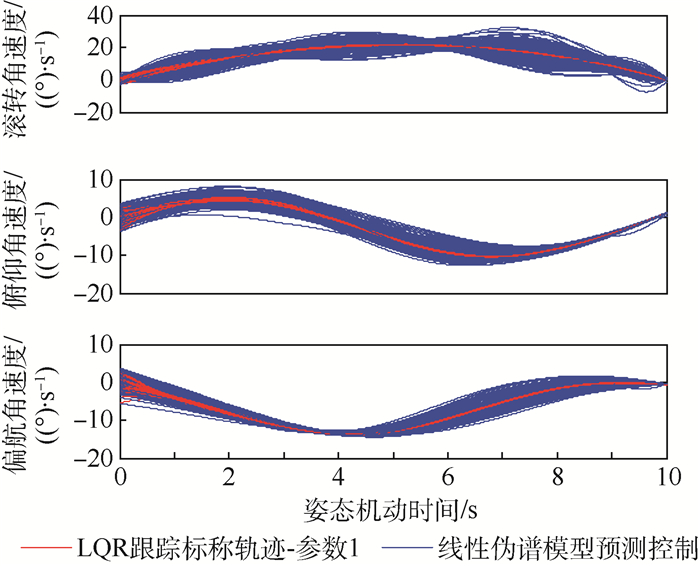
图 6 姿态机动蒙特卡罗仿真角速度曲线
Figure 6. Curves of angular velocities of attitude maneuvers using Monte Carlo simulation

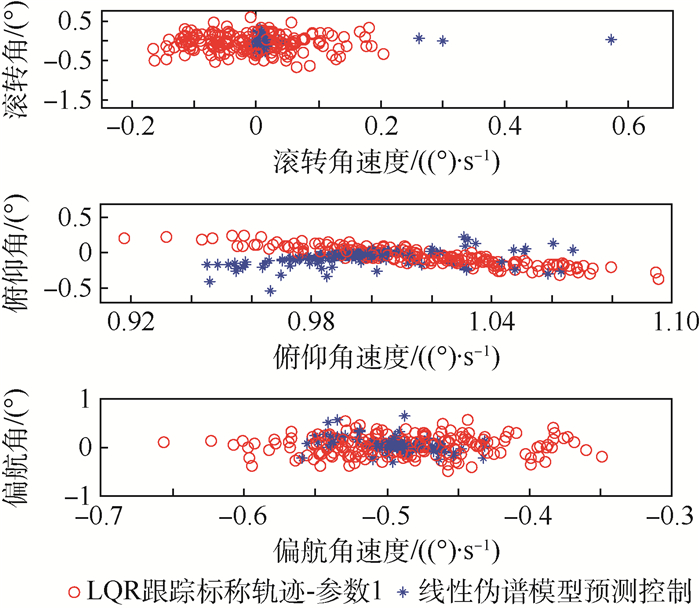
图 7 姿态机动蒙特卡罗仿真终端精度散布图
Figure 7. Scatter diagram of terminal accuracy of attitude maneuvers using Monte Carlo simulation

图 8 姿态机动蒙特卡罗仿真能量消耗对比图
Figure 8. Comparison of energy consumption of attitude maneuvers using Monte Carlo simulation
表 1 飞行器模型参数
Table 1. Model parameters of spacecraft
参数 J/(kg·m2) Umax/(N·m) 数值 diag(5, 70, 70) [5 10 10]  下载: 导出CSV
下载: 导出CSV
表 2 姿态机动单次仿真结果
Table 2. Single simulation results of attitude maneuvers
控制方法 [γf θf ψf]/(°) [ω1f ω2f ω3f]/((°)·s-1) Φ/(N2·m2·s) 线性伪谱模型预测控制 [0.15 -0.19 0.07] [0.008 1 0.94 -0.48] 247.98 LQR跟踪标称轨迹-参数1 [0.26 -0.16 0.35] [-0.097 1.04 -0.56] 260.54 LQR直接控制-参数1 [7.76 17.7 -9.78] [2.21 1.43 -3.28] 489.22 LQR跟踪标称轨迹-参数2 [1.14 0.7 0.62] [-0.13 0.75 -0.75] 240.58 LQR直接控制-参数2 [8.7 23.4 -12.1] [1.93 4.09 -2.76] 249.75
下载: 导出CSV
表 3 姿态机动蒙特卡罗仿真终端精度
Table 3. Terminal accuracy of attitude maneuvers using Monte Carlo simulation
终端项 线性伪谱模型
预测控制LQR跟踪
标称轨迹-参数1均值 标准差 均值 标准差 γf/(°) 0.004 7 0.004 7 -0.046 0.222 3 θf/(°) -0.056 5 0.056 5 -0.050 0.118 3 ψf/(°) 0.028 4 0.028 4 0.020 0.198 0 ω1f/((°)·s-1) 0.004 6 0.004 6 -0.008 3 0.076 8 ω2f/((°)·s-1) 0.994 6 0.994 6 1.014 8 0.031 6 ω3f/((°)·s-1) -0.496 2 0.496 2 -0.489 7 0.055 7
下载: 导出CSV
表 4 姿态机动蒙特卡罗仿真仿真时间
Table 4. Simulation time of attitude maneuvers using Monte Carlo simulation
仿真时间
LQR跟踪
标称轨迹-
参数1线性伪谱模型预测控制 8个节点 10个节点 12个节点 指令生成时间/ms 14.6 59 70 78 全过程仿真时间/s 4.286 4.143 4.352 4.704
下载: 导出CSV
-
[1] 盖俊峰, 赵国荣, 周大旺.刚体飞行器姿态机动的模型预测控制方法[J].弹箭与制导学报, 2015, 35(2):5-9. http://d.old.wanfangdata.com.cn/Periodical/djyzdxb201502002GAI J F, ZHAO G R, ZHOU D W.A model predictive control method for rigid aircraft attitude maneuver[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2015, 35(2):5-9(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/djyzdxb201502002 [2] 赵健康, 尹秋岩, 戴金海.空间飞行器姿态机动预测跟踪控制技术[J].系统仿真学报, 2004, 16(4):711-713. doi: 10.3969/j.issn.1004-731X.2004.04.030ZHAO J K, YIN Q Y, DAI J H.Forecast-tracking control of attitude maneuver of spacecraft based on tracking-filter[J].Journal of System Simulation, 2004, 16(4):711-713(in Chinese). doi: 10.3969/j.issn.1004-731X.2004.04.030 [3] BHARADWAJ S, OSIPCHUK M, MEASE K D, et al.Geometry and inverse optimality in global attitude stabilization[J].Journal of Guidance, Control, and Dynamics, 1998, 21(6):930-939. doi: 10.2514/2.4327 [4] TEWARI A.Optimal nonlinear spacecraft attitude control through Hamilton-Jacobi formulation[J].The Journal of the Astronautical Sciences, 2002, 50(1):99-112. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0216024958/ [5] SHARMA R, TEWARI A.Optimal nonlinear tracking of spacecraft attitude maneuvers[J].IEEE Transactions on control systems technology, 2004, 12(5):677-682. doi: 10.1109/TCST.2004.825060 [6] LUO W, CHU Y C, LING K V.Inverse optimal adaptive control for attitude tracking of spacecraft[J].IEEE Transactions on Automatic Control, 2005, 50(11):1639-1654. doi: 10.1109/TAC.2005.858694 [7] YONMOOK P.Inverse optimal and robust nonlinear attitude control of rigid spacecraft[J].Aerospace Science and Technology, 2013, 28(1):257-265. doi: 10.1016/j.ast.2012.11.006 [8] ALEXIS K, NIKOLAKOPOULOS G, TZES A.Switching model predictive attitude control for a quadrotor helicopter subject to atmospheric disturbances[J].Control Engineering Practice, 2011, 19(10):1195-1207. doi: 10.1016/j.conengprac.2011.06.010 [9] GAVILAN F, VAZQUEZ R, CAMACHO E F.Chance-constrained model predictive control for spacecraft rendezvous with disturbance estimation[J].Control Engineering Practice, 2012, 20(2):111-122. doi: 10.1016/j.conengprac.2011.09.006 [10] OHTSUKA T, FUJⅡ H A.Real-time optimization algorithm for nonlinear receding horizon control[J].Automatica, 1997, 33(6):11471154. http://www.sciencedirect.com/science/article/pii/S0005109897000058 [11] PADHI R, KOTHARI M.Model predictive static programming:A computationally efficient technique for suboptimal control design[J].International Journal of Innovative Computing, Information and Control, 2009, 5(2):399-411. [12] OZA H B, PADHI R.Impact-angle-constrained suboptimal model predictive static programming guidance of air-to-ground missiles[J].Journal of Guidance, Control, and Dynamics, 2012, 35(1):153-164. doi: 10.2514/1.53647 [13] YANG L, ZHOU H, CHEN W C.Application of linear gauss pseudospectral method in model predictive control[J].Acta Astronautica, 2014, 96(1):175-187. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ0232284501 [14] RAHMAN T, ZHOU H, YANG L, et al.Pseudospectral model predictive control for exo-atmospheric guidance[J].International Journal of Aeronautical and Space Sciences, 2015, 16(1):64-76. doi: 10.5139/IJASS.2015.16.1.64 [15] YANG L, CHEN W C, LIU X M, et al.Robust entry guidance using multi-segment linear pseudospectral model predictive control[J].Journal of Systems Engineering and Electronics, 2017, 28(1):103-125. doi: 10.21629/JSEE.2017.01.13 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 552
- HTML全文浏览量: 41
- PDF下载量: 699
- 被引次数: 0
