



Non-line-of-sight signal detection based on unsupervised learning and particle filtering
-
摘要:
全球卫星导航系统(GNSS)是目前应用最广泛的定位技术, 研究城市峡谷中的定位问题时, 由于高楼大厦的阻塞, 仍存在非视距传播导致的性能退化问题。为此, 提出了无监督学习粒子滤波(UL-PF)算法。在卫星信号分类阶段, 使用核k-means聚类的无监督学习分类方法, 在定位阶段, 使用通过聚类算法优化的粒子滤波方法。所提算法考虑了采样粒子在状态空间分布中的内在相似性, 探索在每个聚类中选择一个粒子作为重要粒子, 利用时间序列相关技术提高重采样粒子集的多样性。实验表明:在城市场景中, 所提算法的平均定位精度从传统算法的15 m提高到约5 m, 收敛时间从500 s缩短到200 s左右。
Abstract:Global navigation satellite system (GNSS) is the most widely used positioning technology at present. Due to high-rise structures blocking the signal, the performance deterioration caused on by non-line-of-sight propagation still remains while studying the positioning problem in urban canyons. In order to solve this problem, the unsupervised learning-partinle filter (UL-PF) algorithm is proposed. In the satellite signal classification stage, the unsupervised learning classification method using kernel k-means clustering is used. In the positioning stage, the particle filter method optimized by clustering algorithm is used. The method first considers the inherent similarity of the sampled particles in the state space distribution. Secondly, it explores how to select one particle as the key particle in each cluster and increase the diversity of resampled particle sets by using time series correlation techniques. Experiments show that the average positioning accuracy of the proposed algorithm in urban is improved from 15 m to about 5 m, and the convergence time is reduced from 500 s to about 200 s.
-

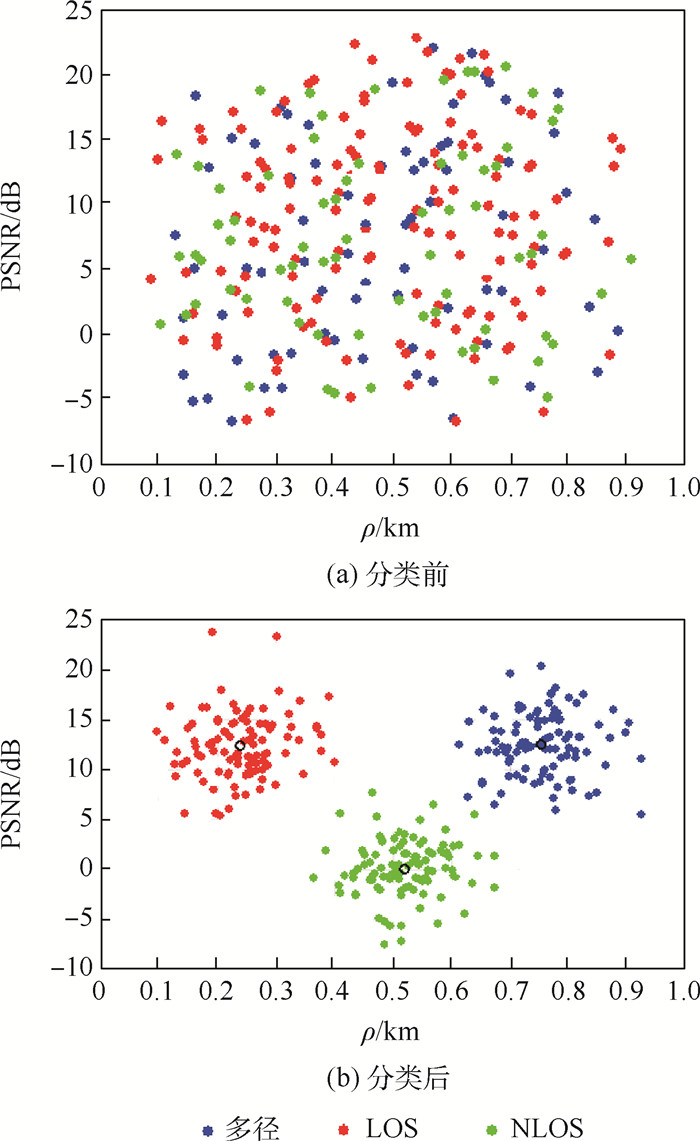
图 1 基于核k-means算法的GNSS信号仿真分类结果
Figure 1. GNSS signal simulation classification results based on kernel k-means algorithm

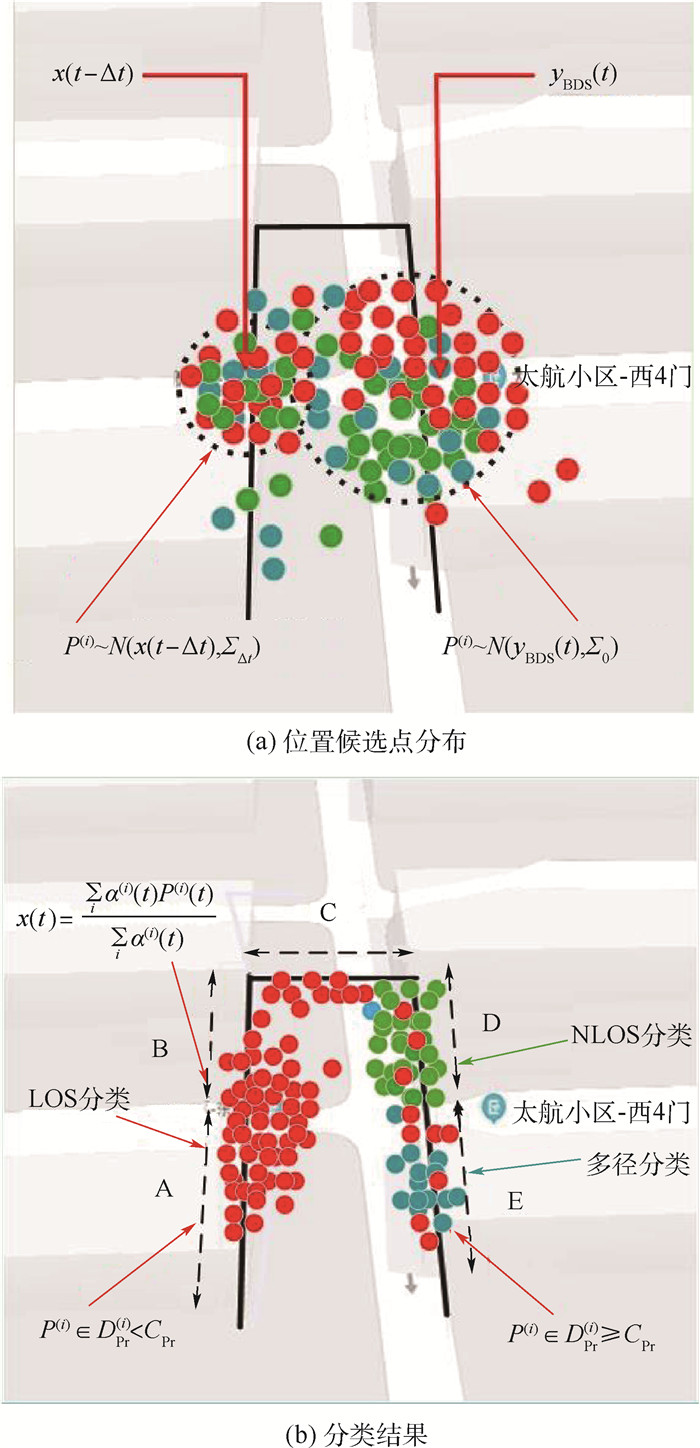
图 3 位置候选点分布及分类结果
Figure 3. Distribution of location candidate points and classification results

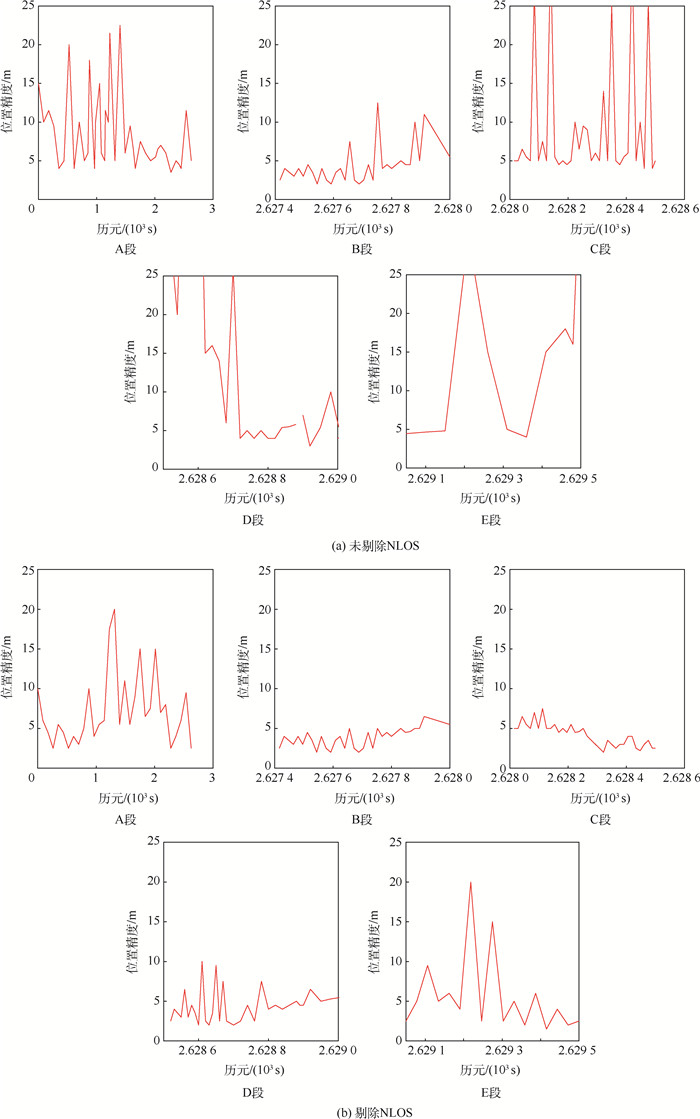
图 4 动态场景中剔除NLOS前后定位误差
Figure 4. Positioning error before and after NLOS elimination in dynamic scene

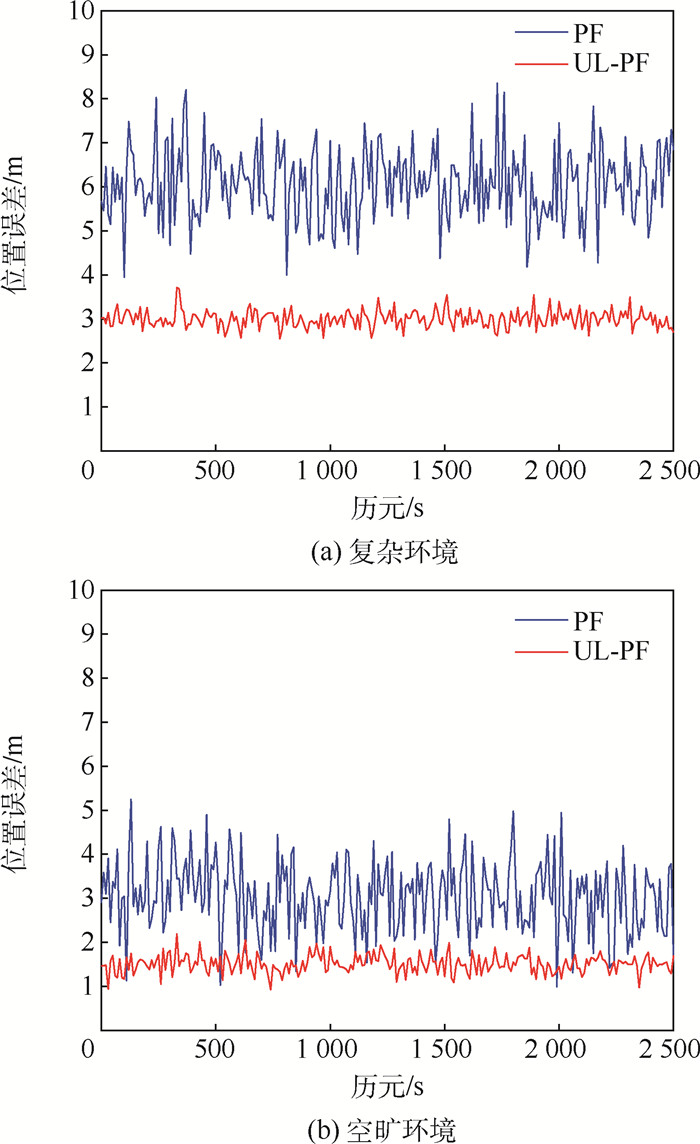
图 5 不同环境下本文算法与传统算法定位误差对比
Figure 5. Comparison of positioning errors between the proposed algorithm and traditional algorithms in different environments

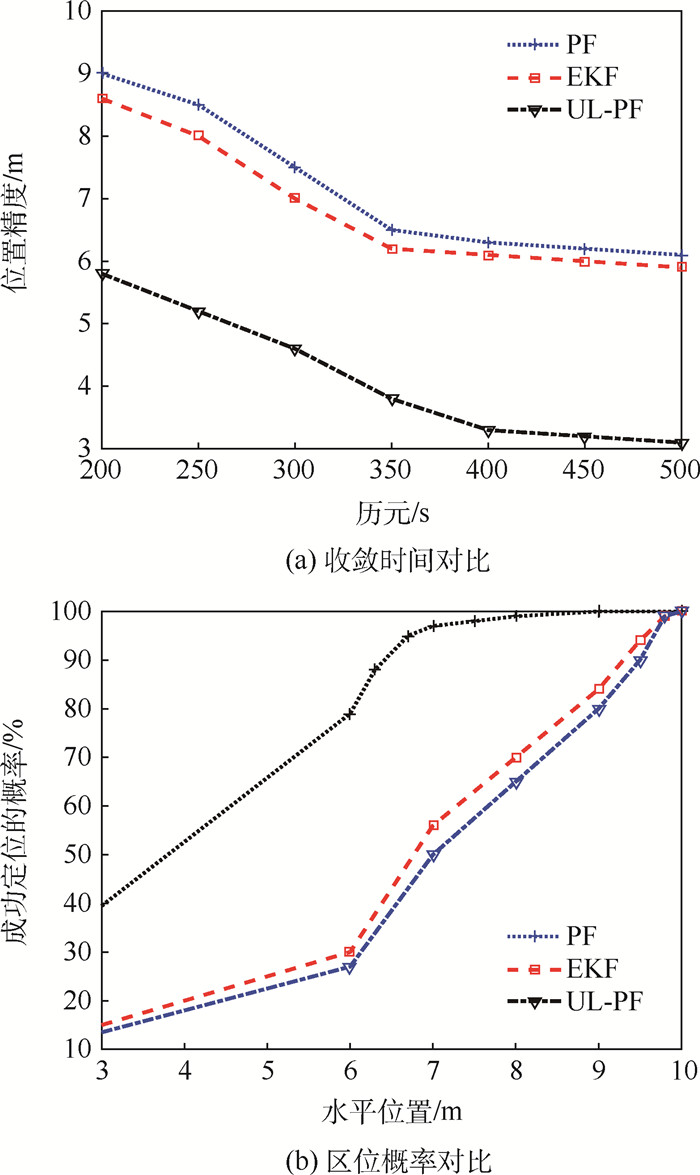
图 6 不同算法的收敛时间和区位概率对比
Figure 6. Comparison of convergence time and location probability of different algorithms
表 1 不同算法对比
Table 1. Comparison of different algorithms
算法 运行时间/s LOS检测准确度/% NLOS检测准确度/% 正确率/% 错误率/% KNN 0.036 9 89.2 95.2 92.2 7.8 NB 0.039 1 85.4 88.2 86.8 13.2 DT 0.055 1 97.2 94.3 95.75 2.25 LS-SVM 0.128 5 98.4 99.4 98.9 1.1 核k-means 0.060 2 97.9 98.9 98.4 1.6  下载: 导出CSV
下载: 导出CSV
-
[1] 曹建波, 王宇飞, 董军. 码相关参考波形技术在卫星导航信号中的多径抑制性能研究[J]. 现代导航, 2019, 10(2): 79-83. doi: 10.3969/j.issn.1674-7976.2019.02.001CAO J B, WANG Y F, DONG J. Research of multipath mitigation performance for CCRW technique in navigation signal[J]. Modern Navigation, 2019, 10(2): 79-83(in Chinese). doi: 10.3969/j.issn.1674-7976.2019.02.001 [2] 孙旭升. GPS多径抑制算法研究报告[J]. 信息通信, 2017, 30(2): 13-14. doi: 10.3969/j.issn.1673-1131.2017.02.007SUN X S. Research report on GPS multipath suppression algorithm[J]. Information & Communications, 2017, 30(2): 13-14 (in Chinese). doi: 10.3969/j.issn.1673-1131.2017.02.007 [3] 李惟, 朱云龙, 王峰, 等. GNSS多径信号模型及测高方法[J]. 北京航空航天大学学报, 2018, 44(6): 1239-1245. doi: 10.13700/j.bh.1001-5965.2017.0417LI W, ZHU Y L, WANG F, et al. GNSS multipath signal model and altimetry method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6): 1239-1245(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0417 [4] 王蓉, 陈思, 胡伟锋, 等. 卫星导航定位误差仿真分析[J]. 计算机测量与控制, 2018, 26(10): 264-268. doi: 10.16526/j.cnki.11-4762/tp.2018.10.057WANG R, CHEN S, HU W F, et al. Simulation and analysis of navigation satellite positioning error[J]. Computer Measurement & Control, 2018, 26(10): 264-268(in Chinese). doi: 10.16526/j.cnki.11-4762/tp.2018.10.057 [5] 王冠宇, 孙蕊, 程琦. 城市峡谷中基于GPS双极化天线的定位方法[J]. 导航定位学报, 2020, 8(4): 13-19. doi: 10.3969/j.issn.2095-4999.2020.04.003WANG G Y, SUN R, CHENG Q. Positioning method based on GPS dual-polarized antenna in urban canyon environment[J]. Journal of Navigation and Positioning, 2020, 8(4): 13-19(in Chinese). doi: 10.3969/j.issn.2095-4999.2020.04.003 [6] 何通, 刘怡俊. 基于地图拟合的GNSS接收机抗多径干扰技术[J]. 电脑知识与技术, 2019, 15(6): 261-262. https://www.cnki.com.cn/Article/CJFDTOTAL-DNZS201906108.htmHE T, LIU Y J. Anti-multipath interference technology of GNSS receiver based on map fitting[J]. Computer Knowledge and Technology, 2019, 15(6): 261-262(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DNZS201906108.htm [7] YUAN Y, SHEN F, LI X D. GPS multipath and NLOS mitigation for relative positioning in urban environments[J]. Aerospace Science and Technology, 2020, 107(12): 106-128. [8] MARANÒ S, GIFFORD W M, WYMEERSCH H, et al. NLOS identification and mitigation for localization based on UWB experimental data[J]. IEEE Journal on Selected Areas in Communications, 2010, 28(7): 1026-1035. doi: 10.1109/JSAC.2010.100907 [9] YOZEVITCH R, MOSHE B B, WEISSMAN A. A robust GNSS LOS/NLOS signal classifier[J]. Navigation, 2016, 63(4): 429-442. [10] ZHU F, BA T E, ZHANG Y, et al. Terminal location method with NLOS exclusion based on unsupervised learning in 5G-LEO satellite communication systems[J]. International Journal of Satellite Communications and Networking, 2020, 38(5): 425-436. [11] FAN J C, AWAN A S. Non-line-of-sight identification based on unsupervised machine learning in ultra wideband systems[J]. IEEE Access, 2019, 7: 32464-32471. [12] 陈唯实, 闫军, 李敬. 基于Rao-Blackwellized蒙特卡罗数据关联的检测跟踪联合优化[J]. 北京航空航天大学学报, 2018, 44(4): 700-708. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201804007.htmCHEN W S, YAN J, LI J. Joint optimization of detection and tracking with Rao-Blackwellized Monte Carlo data association[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(4): 700-708(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201804007.htm [13] 李凯锋, 王保良, 黄志尧, 等. K-均值聚类在CCERT系统流型辨识中的应用[J]. 北京航空航天大学学报, 2017, 43(11): 2280-2285. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201711014.htmLI K F, WANG B L, HUANG Z Y, et al. Application of K-means clustering in flow pattern identification of CCERT system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(11): 2280-2285(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201711014.htm [14] NING F S, CHEN Y C. Combining a modified particle filter method and indoor magnetic fingerprint map to assist pedestrian dead reckoning for indoor positioning and navigation[J]. Sensors (Basel, Switzerland), 2019, 20(1): 185-193. [15] DE MIGUEL M Á, GARCÍA F, ARMINGOL J M. Improved LiDAR probabilistic localization for autonomous vehicles using GNSS[J]. Sensors (Basel, Switzerland), 2020, 20(11): 139-145. [16] YANG W M, SONG L, TEE C A T, et al. Unsupervised learning grouping-based resampling for particle filters[J]. IEEE Access, 2019, 7: 127265-127275. [17] LI T C, SATTAR T P, SUN S D. Deterministic resampling: Unbiased sampling to avoid sample impoverishment in particle filters[J]. Signal Processing, 2012, 92(7): 1637-1645. [18] TZORTZIS G, LIKAS A. The global kernel k-means clustering algorithm[C]//2008 IEEE International Joint Conference on Neural Networks. Piscataway: IEEE Press, 2008: 10365371. [19] AGRAWAL A, GUPTA H. Global K-means (GKM) clustering algorithm: A survey[J]. International Journal of Computer Applications, 2013, 79(2): 20-24. -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 270
- HTML全文浏览量: 76
- PDF下载量: 31
- 被引次数: 0
