



-
摘要:
可重复使用运载火箭动力减速段制导, 面临各种苛刻的过程约束、终端约束及燃料最省的迫切需求, 给制导带来巨大挑战。因此, 提出一种基于分段凸优化和线性二次调节器(LQR)的轨迹跟踪制导律。采用分段凸优化方法对火箭基准速度进行跟踪, 大幅简化了优化模型从而降低凸优化求解的计算量, 同时确保火箭在各种初始误差和模型误差的情况下燃料最省。采用LQR方法实现对火箭飞行位置轨迹的高精度跟踪, 抵抗各种误差和干扰的影响。仿真结果表明:相对于传统的LQR跟踪制导方法, 所提方法能大幅减少燃料消耗, 且在各种误差和干扰下具有较高的轨迹跟踪精度和较强的抗干扰能力;相比于现有的滚动凸优化方法, 所提方法能显著降低求解计算量, 且方法可靠性更高。
Abstract:For the powered descent phase of the reusable launch vehicle, various strict process constraints, terminal constraints and requirements on fuel saving exist, which bring great challenges to the guidance. This paper proposes a trajectory tracking guidance method based on convex optimization and linear quadratic regulator (LQR). The improved receding horizon convex optimization method is used to track the reference velocity of the rocket without requiring accurate thrust control input, which greatly simplifies the optimization model, and thus saves the computational cost of solving the optimal control problem. Meanwhile, the fuel is reduced as far as possible under various initial errors and model errors. On the other hand, the LQR technique is used to track the position of the rocket with high precision. The simulation results show that compared with the traditional LQR tracking guidance method, the proposed method can obtain comparable tracking accuracy, while greatly reducing fuel consumption. And compared to the existing receding horizon convex optimization, the proposed method can evidently reduce the computational cost and improve reliability.
-

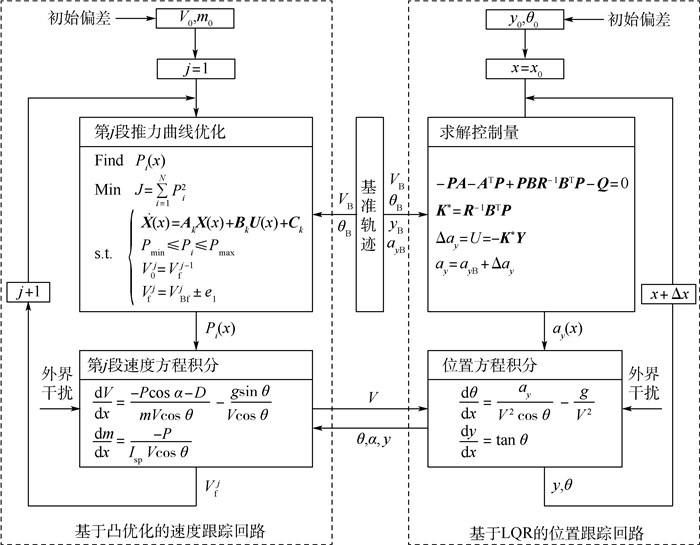
图 2 本文方法的轨迹跟踪信息流程
Figure 2. Information flow chart of trajectory tracking with the proposed method

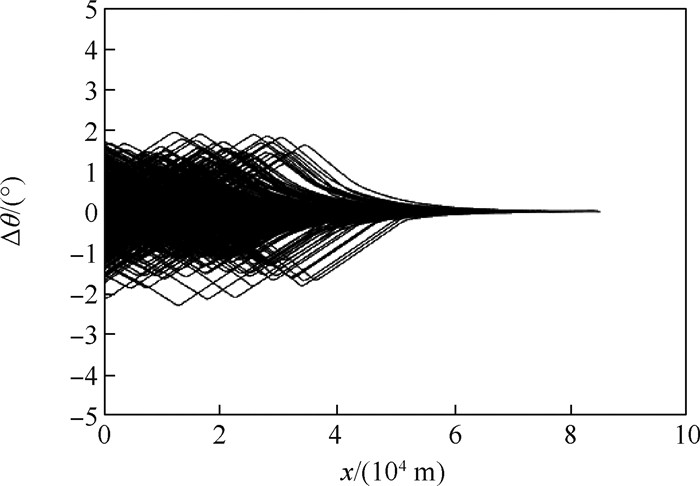
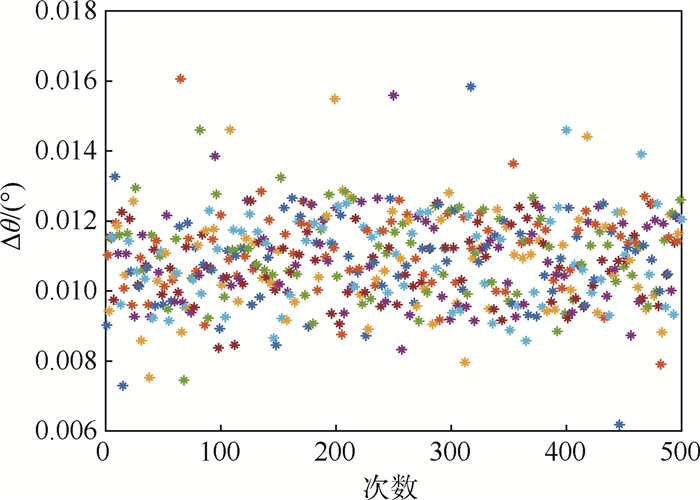
图 17 终端速度倾角误差(蒙特卡罗仿真)
Figure 17. Terminal flight path angle error (Monte-Carlo simulation)
表 1 火箭初始状态和终端状态
Table 1. Initial and terminal states of rocket
状态 速度/(m·s-1) 速度倾角/(°) 航程x/m 高度y/m 初始 2 762.9 -28.82 0 71 410 终端 1 211.9 -37.64 85 129 17 342  下载: 导出CSV
下载: 导出CSV
表 2 两种方法的计算时间
Table 2. Computation time of two methods
方法 计算时间/s LQR+凸优化 22.66 滚动凸优化 103.95
下载: 导出CSV
表 3 不同初始条件下火箭终端质量
Table 3. Terminal mass of the rocket under different intial conditions
方法 火箭终端质量/kg ΔV0=100 m/s Δθ0=2° Δy0=1 000 m 本文方法 65 877 67 611 67 563 LQR方法 65 609 67 339 67 292
下载: 导出CSV
表 4 蒙特卡罗仿真考虑的误差项
Table 4. Disturbances in Monte-Carlo simulation
误差项 标准差 分布形式 初始速度/(m·s-1) 100(3σ) 正态 初始速度倾角/(°) 2(3σ) 正态 初始高度/m 1 000(3σ) 正态 气动阻力/% 10 均匀 气动升力/% 10 均匀 质量偏差/kg 50(3σ) 正态 比冲偏差/% 3(3σ) 正态 风速/(m·s-1) 30(3σ) 正态 注: σ为方差。
下载: 导出CSV
-
[1] 崔乃刚, 吴荣, 韦常柱, 等. 垂直起降可重复使用运载器发展现状与关键技术分析[J]. 宇航总体技术, 2018, 2(2): 27-42. https://www.cnki.com.cn/Article/CJFDTOTAL-YHZJ201802006.htmCUI N G, WU R, WEI C Z, et al. Development and key technologies of vertical takeoff vertical landing reusable launch vehicle[J]. Astronautical Systems Engineering Technology, 2018, 2(2): 27-42(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHZJ201802006.htm [2] 王振国, 罗世彬, 吴建军. 可重复使用运载器研究进展[M]. 长沙: 国防科技大学出版社, 2004: 1-20.WANG Z G, LUO S B, WU J J. Development of reusable launch vehicle technology[M]. Changsha: National University of Defense Technology Press, 2004: 1-20(in Chinese). [3] 高朝辉, 张普卓, 刘宇, 等. 垂直返回重复使用运载火箭技术分析[J]. 宇航学报, 2016, 37(2): 145-152. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201602003.htmGAO Z H, ZHANG P Z, LIU Y, et al. Analysis of vertical landing technique in reusable launch vehicle[J]. Journal of Astronautics, 2016, 37(2): 145-152(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201602003.htm [4] HARPOLD J C, GRAVES C A. Shuttle entry guidance[J]. Journal of Astronautical Sciences, 1978, 27(3): 239-268. [5] ROENNEKE A J, CORNWELL P J. Trajectory control for a low-lift re-entry vehicle[J]. Journal of Guidance, Control, and Dynamics, 1993, 16(5): 927-933. doi: 10.2514/3.21103 [6] DUKEMAN G. Profile-following entry guidance using linear quadratic regulator theory[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2002: 4457. [7] 张大元, 雷虎民, 王君, 等. 一种反馈线性化弹道跟踪制导律设计[J]. 弹道学报, 2014, 26(4): 7-12. doi: 10.3969/j.issn.1004-499X.2014.04.002ZHANG D Y, LEI H M, WANG J, et al. A trajectory tracking guidance law based on feedback linearization method[J]. Journal of Ballistics, 2014, 26(4): 7-12(in Chinese). doi: 10.3969/j.issn.1004-499X.2014.04.002 [8] 刘晓东, 黄万伟, 禹春梅. 含扩张状态观测器的高超声速飞行器动态面姿态控制[J]. 宇航学报, 2015, 36(8): 916-922. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201508008.htmLIU X D, HUANG W W, YU C M. Dynamic surface attitude control for hypersonic vehicle containing extended state observer[J]. Journal of Astronautics, 2015, 36(8): 916-922(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201508008.htm [9] 宋晨, 周军, 郭建国, 等. 高超声速飞行器基于路径跟踪的制导方法[J]. 宇航学报, 2016, 37(4): 435-441. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201604009.htmSONG C, ZHOU J, GUO J G, et al. Hypersonic vehicle guidance based on path-following[J]. Journal of Astronautics, 2016, 37(4): 435-441(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201604009.htm [10] ACIKMESE B, PLOEN S R. Convex programming approach to powered descent guidance for Mars landing[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(5): 1353-1366. doi: 10.2514/1.27553 [11] ACIKMESE B, CARSON J M, BLACKMORE L. Lossless convexification of nonconvex control bound and pointing constraints of the soft landing optimal control problem[J]. IEEE Transactions on Control Systems Technology, 2013, 21(6): 2104-2113. doi: 10.1109/TCST.2012.2237346 [12] BLACKMORE L, ACIKMESE B, SCHARF D P. Minimum-landing-error powered-descent guidance for Mars landing using convex optimization[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(4): 1161-1171. doi: 10.2514/1.47202 [13] LIU X F, LU P. Solving nonconvex optimal control problems by convex optimization[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(3): 750-765. doi: 10.2514/1.62110 [14] LU P, LIU X F. Autonomous trajectory planning for rendezvous and proximity operations by conic optimization[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(2): 375-389. [15] WANG Z B, GRANT M J. Constrained trajectory optimization for planetary entry via sequential convex programming[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(10): 2603-2615. [16] 路钊. 高超声速飞行器再入末段轨迹在线优化[D]. 哈尔滨: 哈尔滨工业大学, 2014: 27-74.LU Z. Online trajectory optimization for the terminal stage of reentry hypersonic vehicles[D]. Harbin: Harbin Institute of Technology, 2014: 27-74(in Chinese). [17] 安泽, 熊芬芬, 梁卓楠. 基于偏置比例导引与凸优化的火箭垂直着陆制导[J]. 航空学报, 2020, 41(5): 323606. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202005017.htmAN Z, XIONG F F, LIANG Z N. Landing-phase guidance of rocket using bias proportional guidance and convex optimization[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(5): 323606(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202005017.htm [18] 雍恩米, 唐国金, 陈磊. 基于Gauss伪谱方法的高超声速飞行器再入轨迹快速优化[J]. 宇航学报, 2008, 29(6): 1766-1772. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200806017.htmYONG E M, TANG G J, CHEN L. Rapid trajectory optimization for hypersonic reentry vehicle via Gauss pseudospectral method[J]. Journal of Astronautics, 2008, 29(6): 1766-1772(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB200806017.htm [19] 王少奇, 马东立, 杨穆清, 等. 高空太阳能无人机三维航迹优化[J]. 北京航空航天大学学报, 2019, 45(5): 936-943. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201905011.htmWANG S Q, MA D L, YANG M Q, et al. Three-dimensional optimal path planning for high-altitude solar-powered UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(5): 936-943(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201905011.htm [20] DARBY C L, HAGER W W, RAO A V. An hp-adaptive pseudospectral method for solving optimal control problems[J]. Optimal Control Applications and Methods, 2011, 32(4): 476-502. [21] 李樾, 韩维, 陈清阳, 等. 凸优化算法在有人/无人机协同系统航迹规划中的应用[J]. 宇航学报, 2020, 41(3): 276-286. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB202003005.htmLI Y, HAN W, CHEN Q Y, et al. Application of convex optimization algorithm in trajectory planning of manned/unmanned cooperative system[J]. Journal of Astronautics, 2020, 41(3): 276-286(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB202003005.htm [22] 唐胜景, 王肖, 郭杰. 基于hp伪谱凸优化的高超声速滑翔飞行器轨迹优化与制导[J]. 战术导弹技术, 2020(5): 66-75. https://www.cnki.com.cn/Article/CJFDTOTAL-ZSDD202005012.htmTANG S J, WANG X, GUO J. Trajectory optimization and guidance for hypersonic gliding vehicles based on hp pseudospectral convex programming[J]. Tactical Missile Technology, 2020(5): 66-75(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZSDD202005012.htm [23] QUOC T D, SAVORGNAN C, DIEHL M. Real-time sequential convex programming for optimal control applications[C]//Modeling, Simulation and Optimization of Complex Processes, 2012: 91-102. -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 400
- HTML全文浏览量: 110
- PDF下载量: 58
- 被引次数: 0
