



Multi-agent coverage control based on communication connectivity maintenance constraints
-
摘要:
覆盖控制会根据环境信息,尽量分散智能体以达到较好的空间覆盖效果,实现对于任务区域的最优监视。在这一过程中,智能体之间的协同依赖于连通的通信网络。受限于智能体在复杂电磁环境下有限的通信范围,覆盖控制中的分散行为可能造成通信网络的中断,导致任务失败。因此,将通信网络连通作为约束,基于梯度下降方法,提出了有界的分布式控制律,以保证在覆盖代价函数下降的同时,网络连通度不小于设定阈值。为减少通信连通保持对于覆盖效果的影响,提出了一种基于关键智能体辨识的分段控制方法。通过动态分配覆盖和通信连通保持的控制增益,以减少因二者运动趋势相反而产生的控制震荡和冗余。针对陷入局部最优的死锁现象,提出一种死锁消除控制,以及时消除死锁,提升覆盖性能。基于高频结构仿真(HFSS)软件生成的信号场的覆盖仿真实验表明了控制律的有效性。
Abstract:Coverage control will disperse the agents as much as possible according to the environmental information to achieve a better spatial coverage effect and realize the optimal monitoring of the task area. In this process, the cooperation between agents depends on the connected communication network. Limited by the finite communication range of agents in complex electromagnetic environments, the decentralized behavior in coverage control may cause the interruption of the communication network and task failure. Therefore, to ensure that the coverage cost function lowers while the network connectivity does not fall below the predetermined threshold, this study uses the connectivity of the communication network as a constraint and offers a bounded distributed control law based on the gradient descent approach. A segmented control strategy based on the identification of critical agents is also proposed in order to lessen the impact of communication link maintenance on the coverage effect. By dynamically allocating the control gains of coverage and communication connectivity maintenance, the control oscillation and redundancy caused by the opposite movement trend of the two are reduced. Finally, aiming at the deadlock phenomenon of falling into local optimization, this paper proposes a deadlock elimination control, which can eliminate the deadlock in time and improve coverage performance. The coverage simulation experiment of the signal field generated by high-frequency structure simulation (HFSS) software shows the effectiveness of the proposed control laws.
-

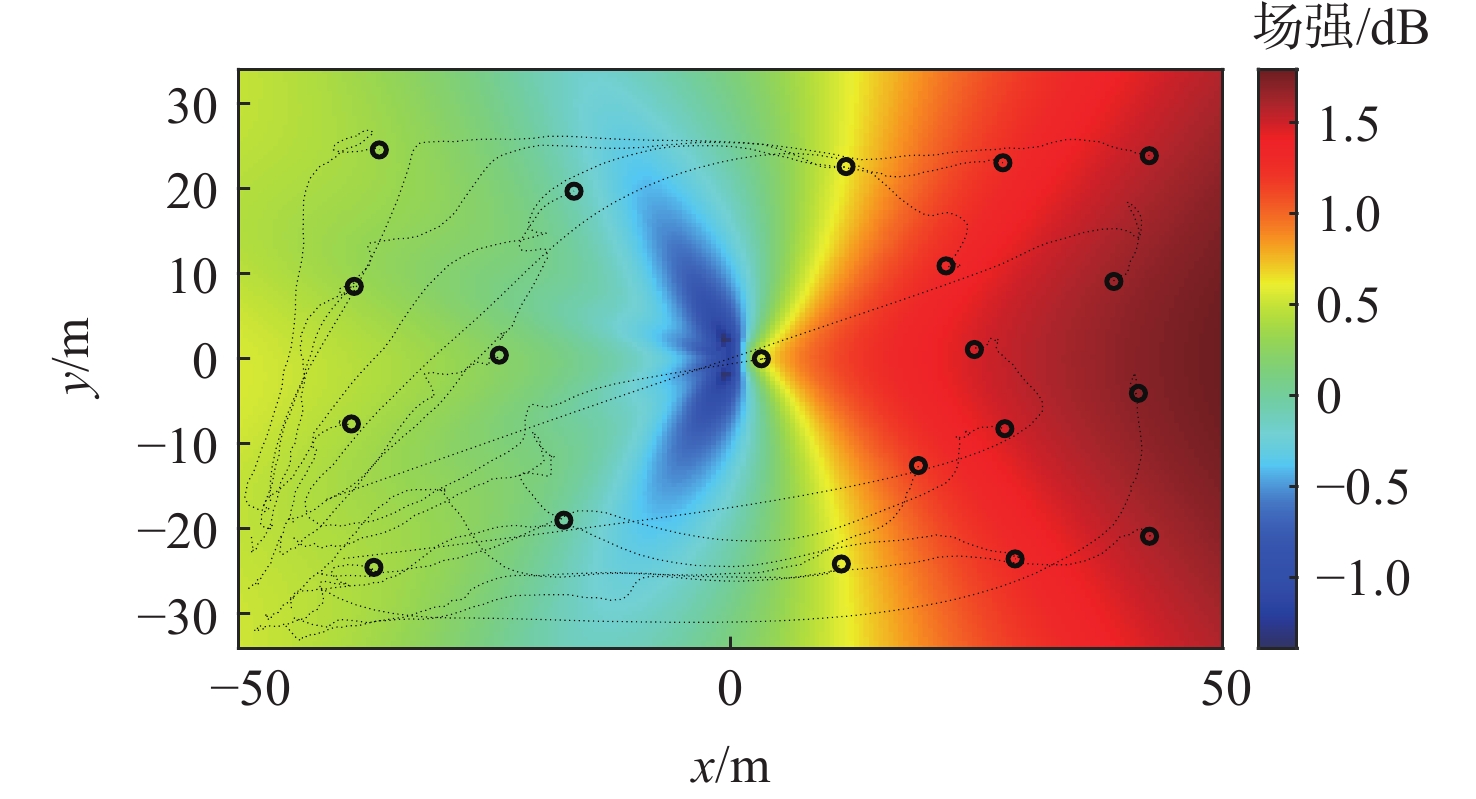
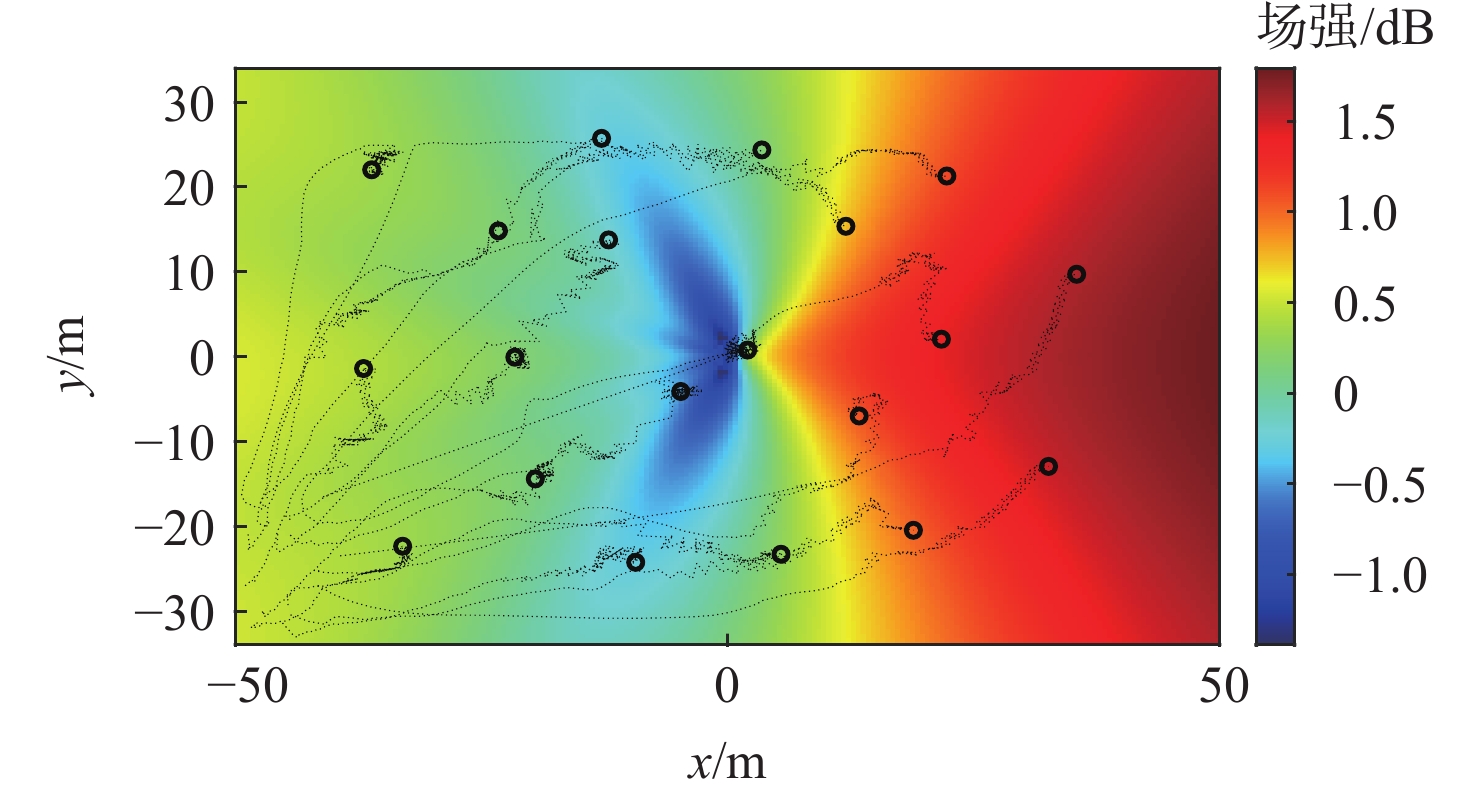
图 4 无通信连通保持的覆盖最终构型及轨迹
Figure 4. Final configuration and trajectory of coverage without communication connectivity maintenance

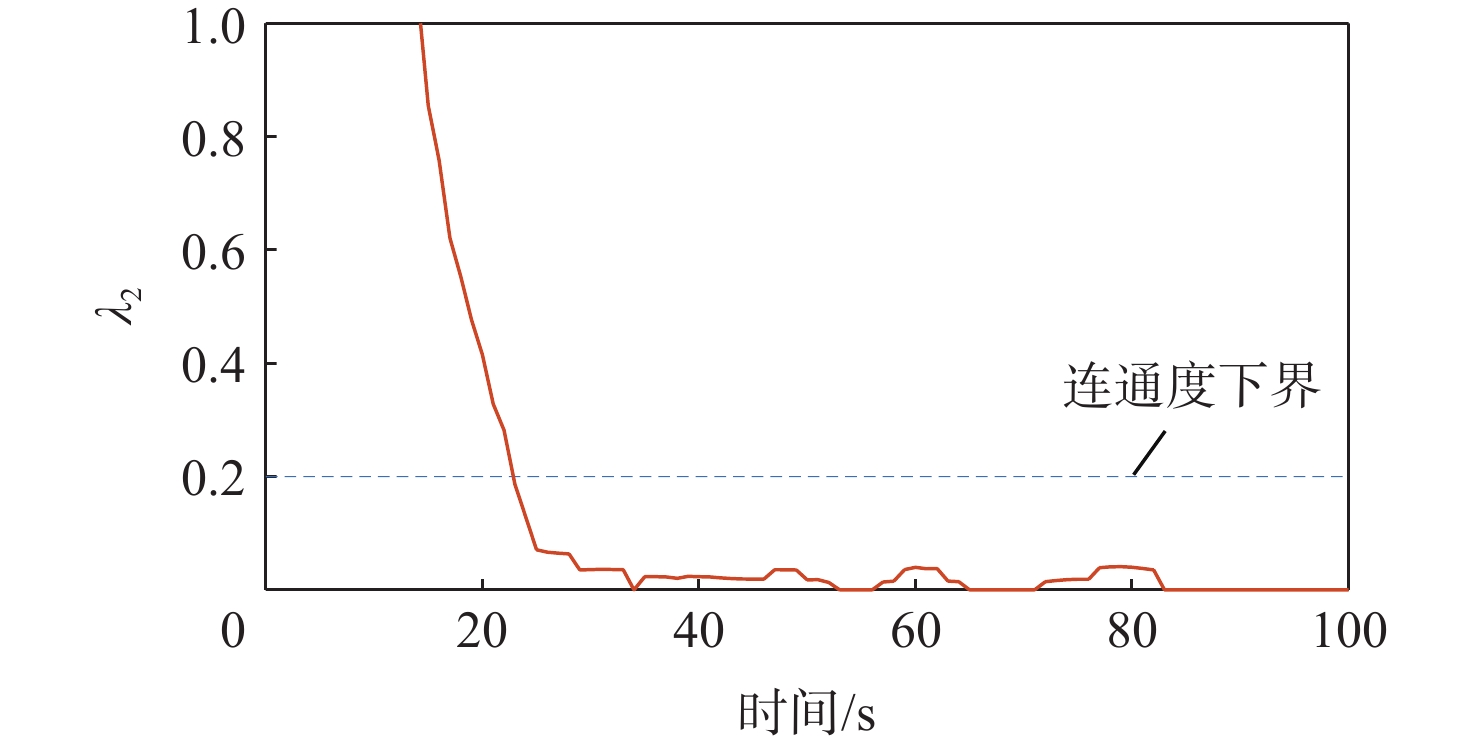
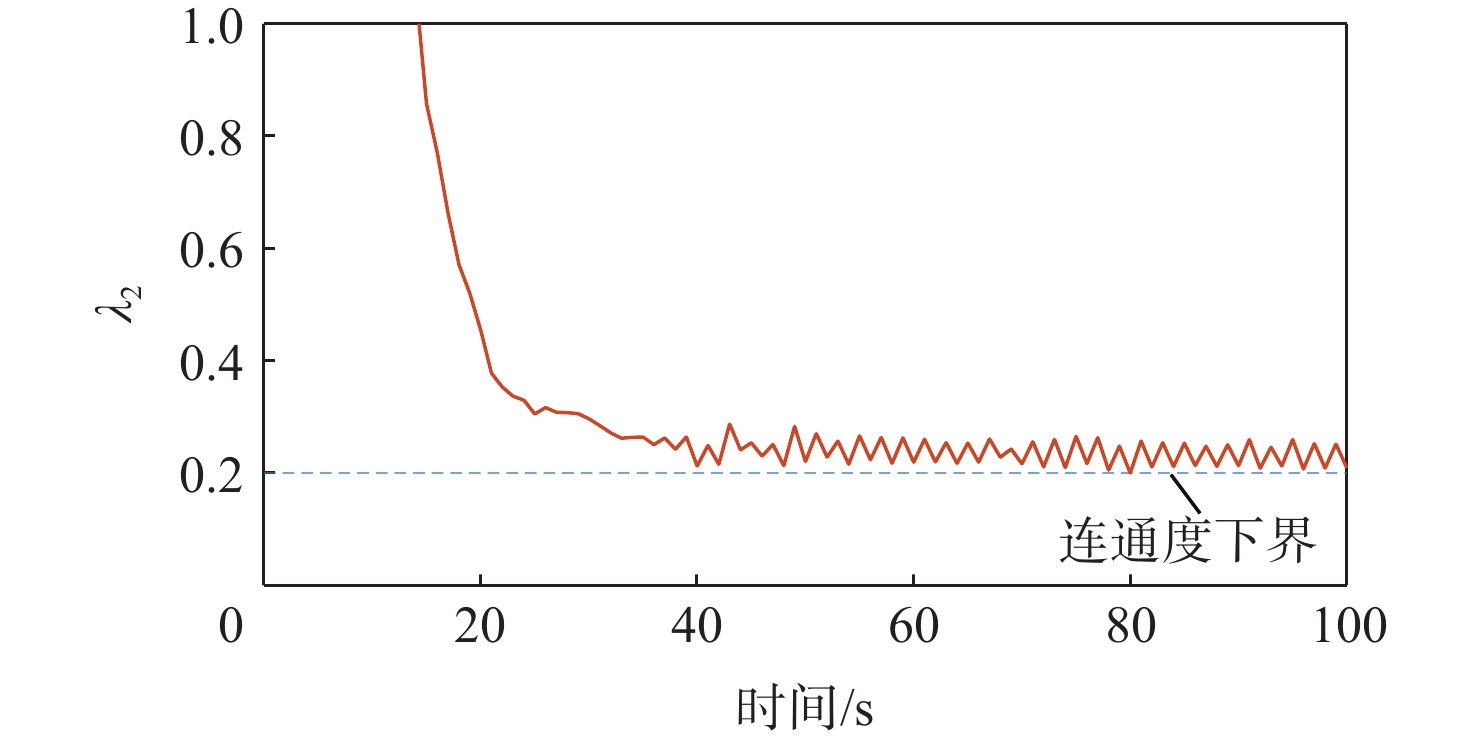
图 5 无通信连通保持的连通度曲线
Figure 5. Connectivity curve without communication connectivity maintenance

图 6 通信连通保持的覆盖最终构型及轨迹
Figure 6. Final configuration and trajectory of coverage by communication connectivity maintenance

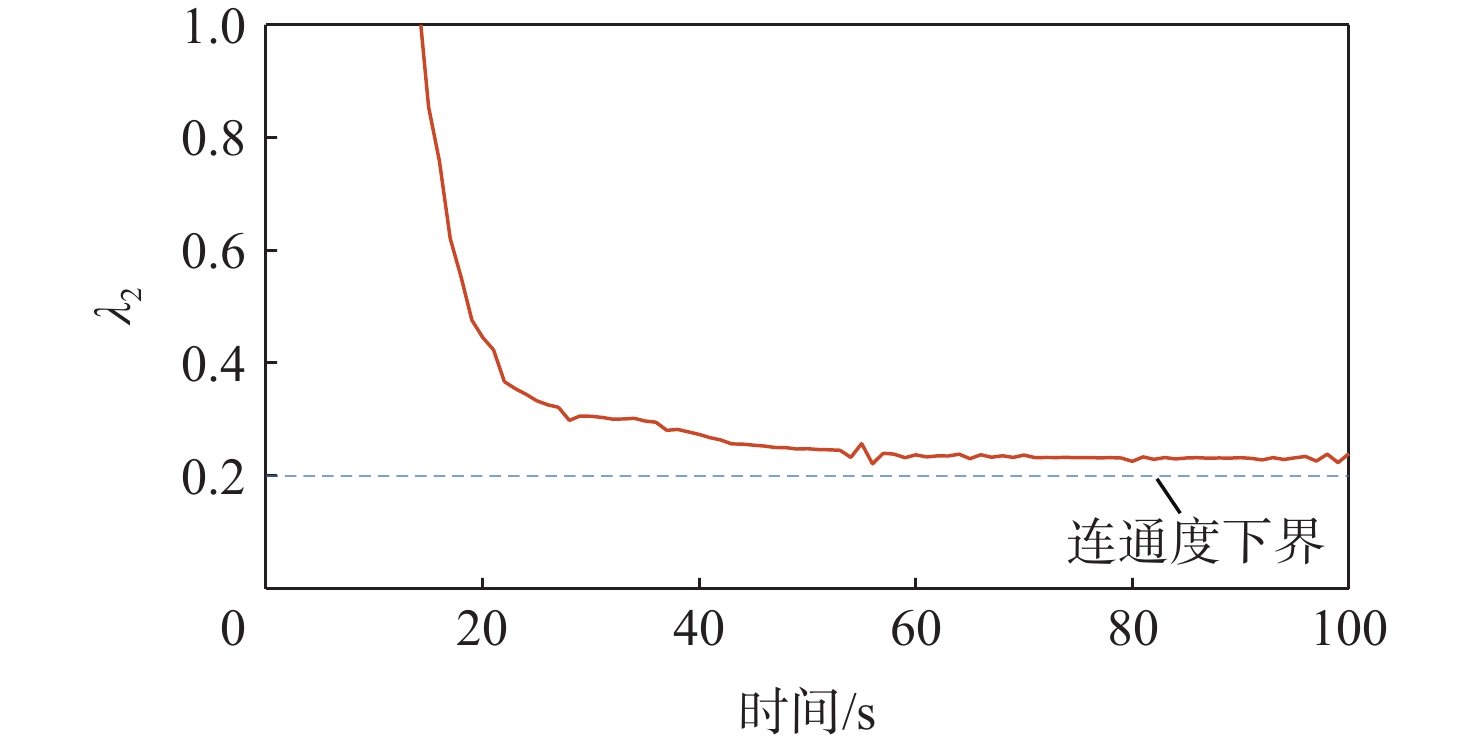
图 7 通信连通保持的连通度曲线
Figure 7. Connectivity curve with communication connectivity maintenance

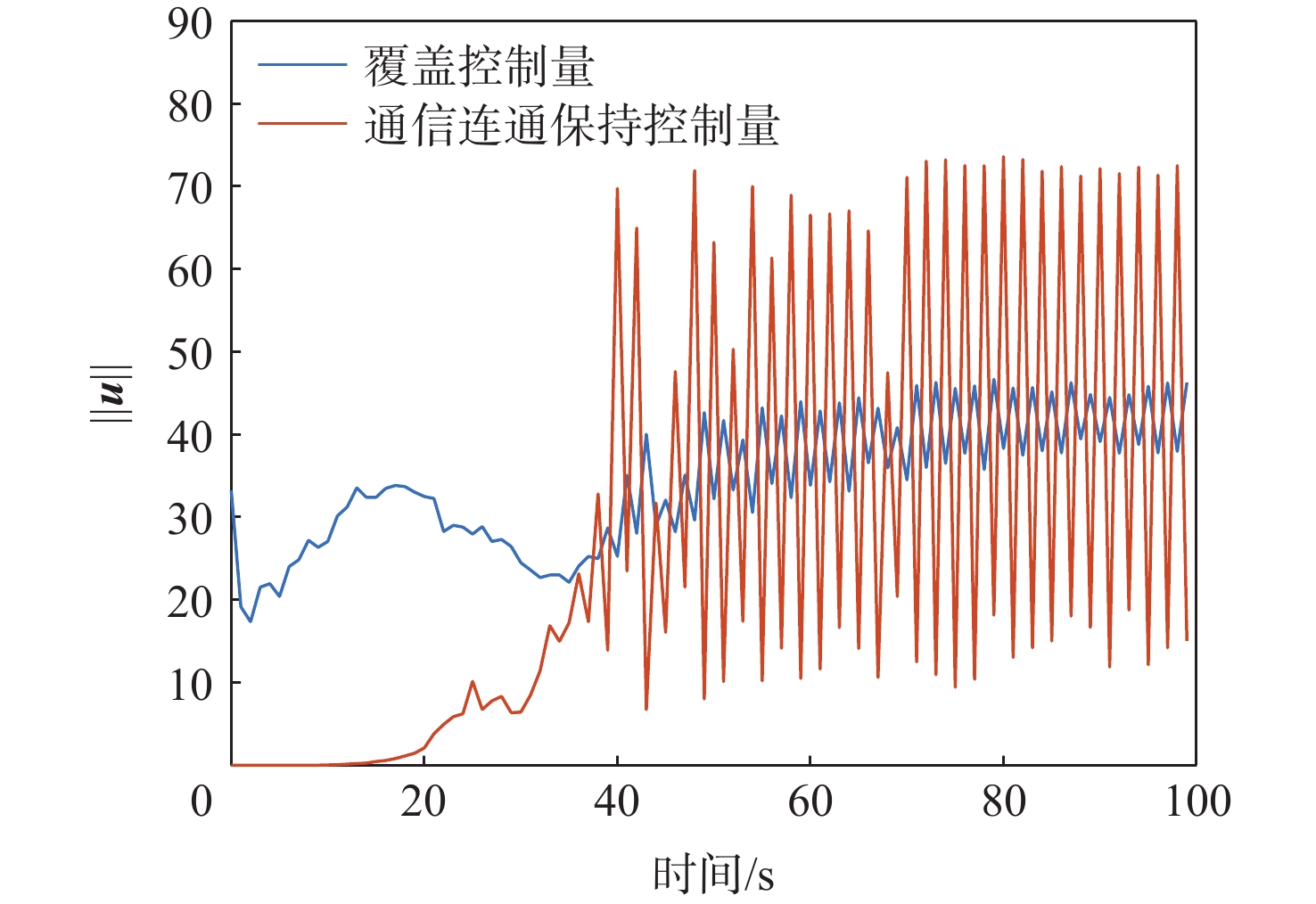
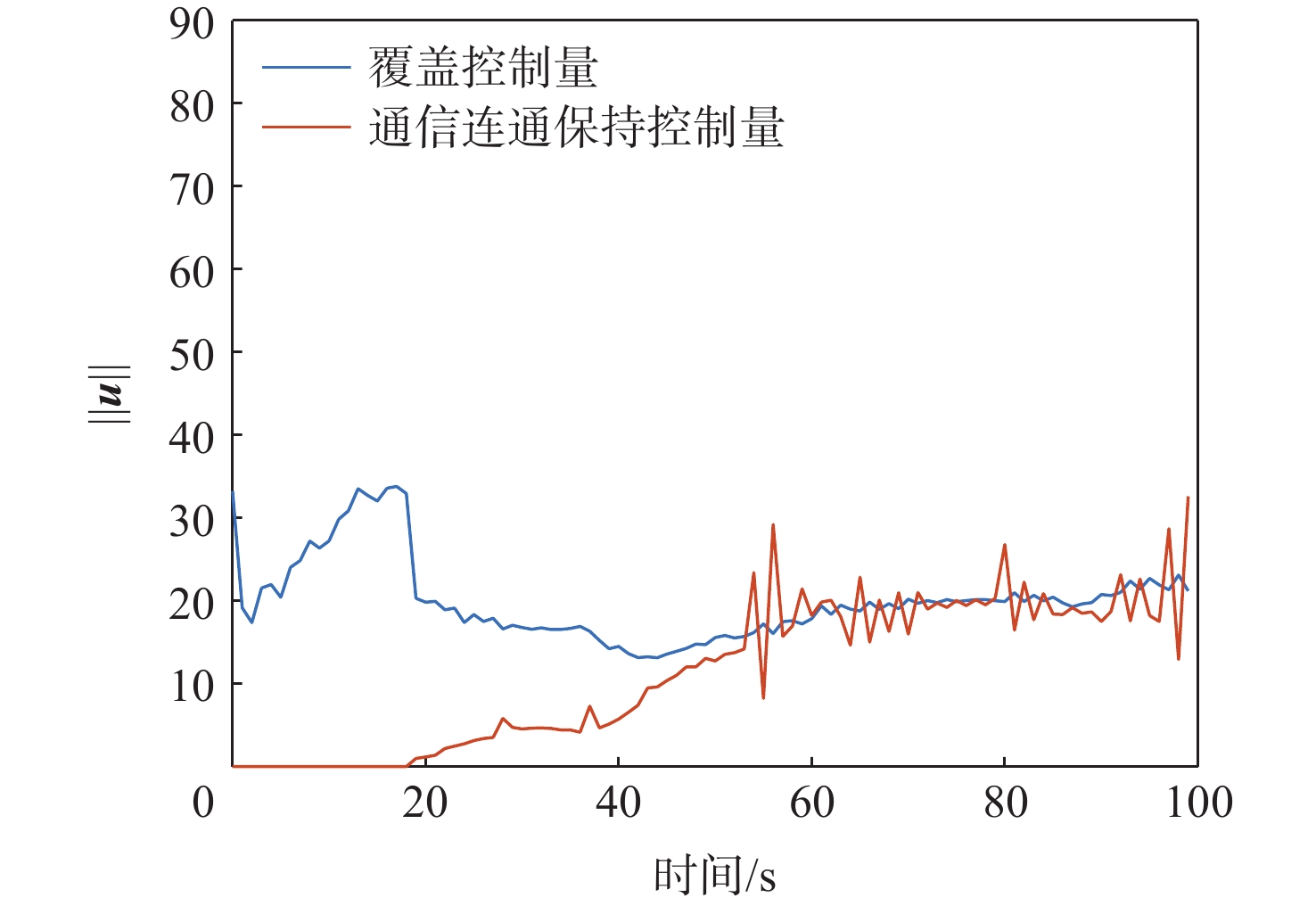
图 8 有通信连通保持的控制分量曲线
Figure 8. Control component curves with communication connectivity maintaining coverage

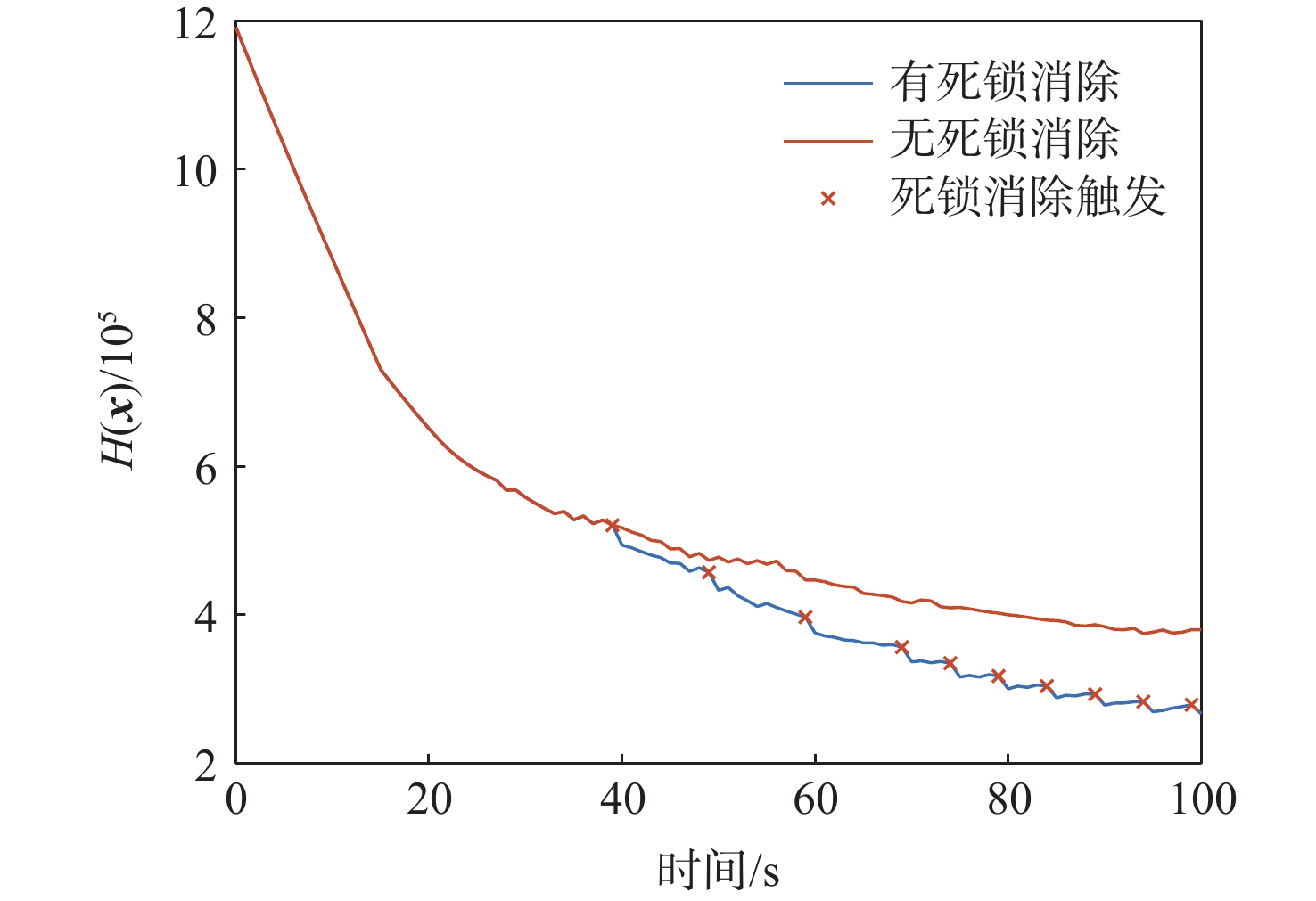
图 11 有/无死锁消除控制的代价函数曲线
Figure 11. Cost function curves with and without deadlock elimination control
表 1 实验参数
Table 1. Experiment parameter
参数 数值 通信范围$R/{\text{m}}$ 24 最小连通度约束 0.2 控制增益$\alpha $ 1.3 覆盖控制律限幅${k_{\text{e}}}$ 2 通信连通保持控制律限幅${k_{\text{c}}}$ 3 覆盖总时长$/{\text{s}}$ 100  下载: 导出CSV
下载: 导出CSV
表 2 有/无连通保持的覆盖性能对比
Table 2. Comparison of coverage performance with and without connectivity maintenance
智能体
数量无连通保持$H({{\boldsymbol{x}}_T})/{10^3}$ 有连通保持$H({{\boldsymbol{x}}_T})/{10^3}$ 均值 标准差 均值 标准差 10 162.3 7.227 346.3 73.66 15 128.7 1.939 255.6 19.04 20 109.5 1.054 176.5 6.62
下载: 导出CSV
表 3 不分段控制与分段控制的覆盖效果对比
Table 3. Comparison of coverage performance between non piecewise control and piecewise control
103 智能体
数量$H({{\boldsymbol{x}}_T})$ $\bar u$ $\sigma $ 不分段控制效果 分段控制效果 不分段控制效果 分段控制效果 不分段控制效果 分段控制效果 10 346.3 369.8 23.25 7.979 7.491 3.192 15 255.6 288.3 28.16 9.395 8.101 4.301 20 176.5 218.8 29.71 9.549 7.918 4.259
下载: 导出CSV
表 4 有/无死锁消除的覆盖代价函数值对比
Table 4. Comparison of coverage cost function values with and without deadlock elimination
103 智能体数量 最优值 连通控制 分段控制 死锁消除 10 162.3 346.3 369.8 279.2 15 128.7 255.6 288.3 182.9 20 109.5 176.5 218.8 161.9
下载: 导出CSV
-
[1] PHAM H X, LA H M, FEIL-SEIFER D, et al. A distributed control framework of multiple unmanned aerial vehicles for dynamic wildfire tracking[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(4): 1537-1548. [2] SERAJ E, GOMBOLAY M. Coordinated control of UAVs for human-centered active sensing of wildfires[C]//2020 American Control Conference. Piscataway: IEEE Press, 2020: 1845-1832. [3] KANTOR G, SINGH S, PETERSON R, et al. Distributed search and rescue with robot and sensor teams[M]//Springer Tracts in Advanced Robotics. Berlin, Heidelberg: Springer Berlin Heidelberg, 2006: 529-538. [4] CORTES J, MARTINEZ S, KARATAS T, et al. Coverage control for mobile sensing networks[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 243-255. doi: 10.1109/TRA.2004.824698 [5] SCHWAGER M, RUS D, SLOTINE J J. Decentralized, adaptive coverage control for networked robots[J]. The International Journal of Robotics Research, 2009, 28(3): 357-375. doi: 10.1177/0278364908100177 [6] WU Y L, REN X G, ZHOU H, et al. A survey on multi-robot coordination in electromagnetic adversarial environment: challenges and techniques[J]. IEEE Access, 2020, 8: 53484-53497. doi: 10.1109/ACCESS.2020.2981408 [7] LUO W H, SYCARA K. Voronoi-based coverage control with connectivity maintenance for robotic sensor networks[C]//2019 International Symposium on Multi-Robot and Multi-Agent Systems. Piscataway: IEEE Press, 2019: 148-154. [8] 董鑫, 李晓丽, 富锦芸. 具有盲区的有向视觉传感器网络连通保持覆盖控制[J]. 计算机应用研究, 2021, 38(10): 3137-3142. doi: 10.19734/j.issn.1001-3695.2021.01.0028DONG X, LI X L, FU J Y. Dcrected vision sensor network with blind spots keeps conneted and maintains coverage control[J]. Application Research of Computers, 2021, 38(10): 3137-3142(in Chinese). doi: 10.19734/j.issn.1001-3695.2021.01.0028 [9] SILIGARDI L, PANERATI J, KAUFMANN M, et al. Robust area coverage with connectivity maintenance [C]//2019 International Conference on Robotics and Automation. New York: ACM, 2019: 2202-2208. [10] KAWAJIRI S, HIRASHIMA K, SHIRAISHI M. Coverage control under connectivity constraints[C]//Proceedings of the 20th International Conference on Autonomous Agents and Multi Agent Systems. Richland: International Foundation for Autonomous Agents and Multiagent Systems, 2021: 1554-1556. [11] KHATERI K, POURGHOLI M, MONTAZERI M, et al. A comparison between decentralized local and global methods for connectivity maintenance of multi-robot networks[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 633-640. doi: 10.1109/LRA.2019.2892552 [12] WU S G, PU Z Q, LIU Z, et al. Multi-target coverage with connectivity maintenance using knowledge-incorporated policy framework [C]//2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2021: 8772-8778. [13] LIU Q W, ZHOU S L, GIANNAKIS G B. Cross-layer combining of adaptive modulation and coding with truncated ARQ over wireless links[J]. IEEE Transactions on Wireless Communications, 2004, 3(5): 1746-1755. doi: 10.1109/TWC.2004.833474 [14] LIU Q C, YE M B, SUN Z Y, et al. Coverage control of unicycle agents under constant speed constraints[J]. IFAC-PapersOnLine, 2017, 50(1): 2471-2476. [15] SCHWAGER M A. gradient optimization approach to adaptive multi-robot control[D]. Boston: Massachusetts Institute of Technology, 2009: 42-44. [16] YANG P, FREEMAN R A, GORDON G J, et al. Decentralized estimation and control of graph connectivity for mobile sensor networks[J]. Automatica, 2010, 46(2): 390-396. doi: 10.1016/j.automatica.2009.11.012 [17] SABATTINI L, CHOPRA N, SECCHI C. Decentralized connectivity maintenance for cooperative control of mobile robotic systems[J]. International Journal of Robotics Research, 2013, 32(12): 1411-1423. doi: 10.1177/0278364913499085 [18] BLANCHINI F. Set invariance in control[J]. Automatica, 1999, 35(11): 1747-1767. doi: 10.1016/S0005-1098(99)00113-2 [19] CAPELLI B, SABATTINI L. Connectivity maintenance: Global and optimized approach through control barrier functions [C]//2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2020: 5590-5596. [20] HUNG P D, VINH T Q, NGO T D. Hierarchical distributed control for global network integrity preservation in multirobot systems[J]. IEEE Transactions on Cybernetics, 2020, 50(3): 1278-1291. doi: 10.1109/TCYB.2019.2913326 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 107
- HTML全文浏览量: 14
- PDF下载量: 13
- 被引次数: 0
