| Citation: | ZHOU Weidong, SUN Tian, CHU Min, et al. Interacting multiple model particle filter optimization resampling algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(5): 865-871. doi: 10.13700/j.bh.1001-5965.2016.0348(in Chinese)

|
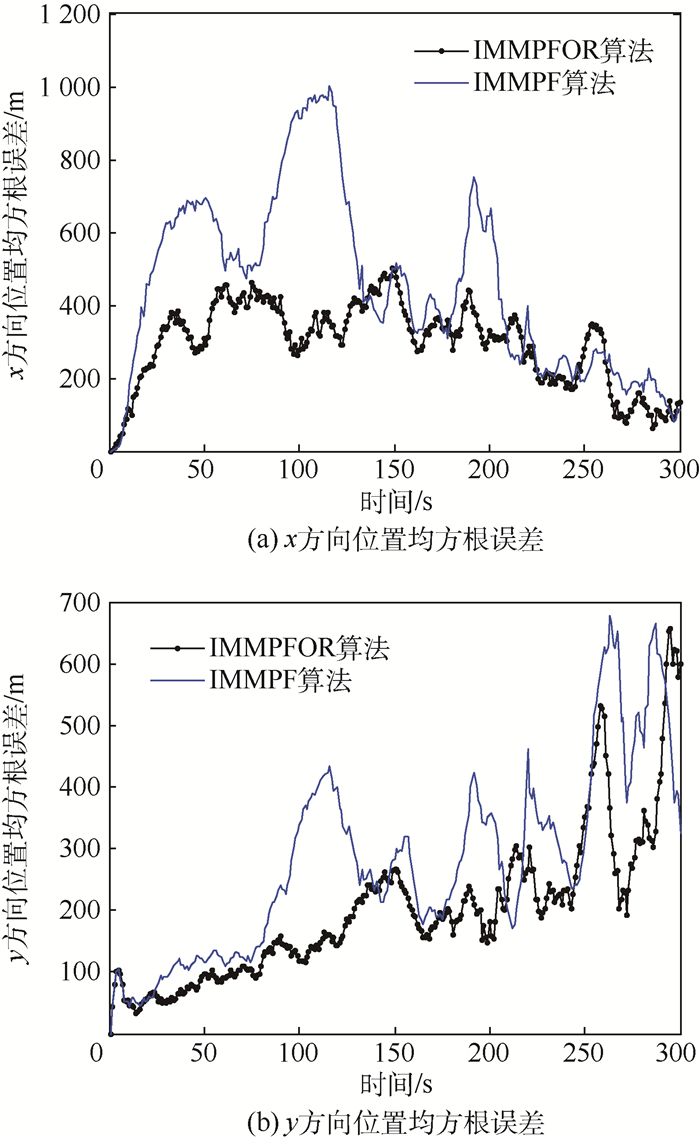
For the problem of particles degeneration and lack of diversity in standard interacting multiple model particle filter (IMMPF) algorithm, a novel algorithm is presented, which is referred to as interacting multiple model particle filter optimization resampling (IMMPFOR) algorithm using linear optimization method in each model to improve the small-weight particles. The novelty of this algorithm lies in replacing the small-weight particles with new particles after the measurement information is received. New particles contain not only the information of the particles in the current model, but also the information of the particles in interacting models. The tracking simulation results show that the posterior probability density function of each model with newly generated set of particles accurately approximates the real state posterior probability density function, and the estimation accuracy of IMMPFOR is higher than the standard IMMPF algorithm.

| [1] |
SEAH C E, HWANG I.State estimation for stochastic linear hybrid systems with continuous state dependent transitions: An IMM approach [J].IEEE Transactions on Aerospace & Electronics Systems, 2009, 45(1):376-392.
|
| [2] |
BLOM H A P, BAR-SHALOM Y.The interacting multiple model algorithm for systems with Markovian switching coefficients [J].IEEE Transactions on Automatic Control, 1988, 33(8):780-783. doi: 10.1109/9.1299
|
| [3] |
VIVONE G, BRACA P, HORSTMANN J.Variable structure interacting multiple model algorithm for ship tracking using HF surface wave radar data[C]// Oceans-2015.Piscataway, NJ:IEEE Press, 2015:1-8.
|
| [4] |
ZHOU W, LIU M.Robust interacting multiple model algorithms based on multi-sensor fusion criteria [J].International Journal of Systems Science, 2016, 47(1):92-106. doi: 10.1080/00207721.2015.1029566
|
| [5] |
朱志宇.粒子滤波算法及其应用[M].北京:科学出版社, 2010.
ZHU Z Y.Particle filter algorithm and its application[M].Beijing:Science Press, 2010(in Chinese).
|
| [6] |
GORDON N J, SALMOND D J, SMITH A F M.Novel approach to nonlinear/non-Gaussian Bayesian state estimation [J].IEEE Proceedings F-Radar & Signal Processing, 1993, 140(2):107-113. http://ieeexplore.ieee.org/document/210672/?arnumber=210672
|
| [7] |
BOERS Y, DRIESSEN J N.Interacting multiple model particle filter [J].IEE Proceedings-Radar, Sonar and Navigation, 2003, 150(5):344-349. doi: 10.1049/ip-rsn:20030741
|
| [8] |
王晓, 韩崇昭.基于混合采样的多模型机动目标跟踪算法[J].自动化学报, 2013, 39(7):1152-1156. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201307024.htm
WANG X, HAN C Z.A multiple model particle filter for maneuvering target tracking based on composite sampling[J].Acta Automatica Sinica, 2013, 39(7):1152-1156(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201307024.htm
|
| [9] |
王伟, 余玉揆.多点测试的多模型机动目标跟踪算法[J].自动化学报, 2015, 41(6):1201-1212. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201506014.htm
WANG W, YU Y K.Multi-try and multi-model particle filter for maneuvering target tracking[J].Acta Automatica Sinica, 2015, 41(6):1201-1212(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201506014.htm
|
| [10] |
MCGINNITY S, IRWIN G W.Multiple model bootstrap filter for maneuvering target tracking [J].IEEE Transactions on Aerospace & Electronics Systems, 2000, 36(3):1006-1012. http://adsabs.harvard.edu/abs/2000ITAES..36.1006M
|
| [11] |
VAN DER MERWE R, DOUCET A, DE FREITAS N, et al.The unscented particle filter [J].Advances in Neural Information Processing Systems, 2000, 13:584-590.
|
| [12] |
MUSSO C, OUDJANE N, LE GRAND F.Improving regularized particle filters[M]//DOUCET A, DE FREITAS N, GORDON N.Sequential Monte Carlo method in practice.New York:Springer-Verlag, 2001:247-271.
|
| [13] |
TANIZAKI H.Nonlinear filters based on Taylor series expansion [M]// TANIZAKI H.Nonlinear filters:Estimation and applications.Berlin:Springer, 1993, 25(6):81-88.
|
| [14] |
LIU J S, CHEN R.Sequential Monte Carlo methods for dynamic systems [J].Journal of the American Statistical Association, 1998, 93(443):1032-1044. doi: 10.1080/01621459.1998.10473765
|
| [15] |
邹国辉, 敬忠良, 胡洪涛.基于优化组合重采样的粒子滤波算法[J].上海交通大学学报, 2006, 40(7):1135-1139. http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT200607014.htm
ZOU G H, JING Z L, HU H T.A particle filter algorithm based on optimizing combination resampling[J].Journal of Shanghai Jiaotong University, 2006, 40(7):1135-1139(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT200607014.htm
|

Figures(5) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: