| Citation: | WANG Qing, GONG Ligang, DONG Chaoyanget al. Spacecraft attitude passivity control based on PCH model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(6): 1061-1071. doi: 10.13700/j.bh.1001-5965.2016.0414(in Chinese)

|
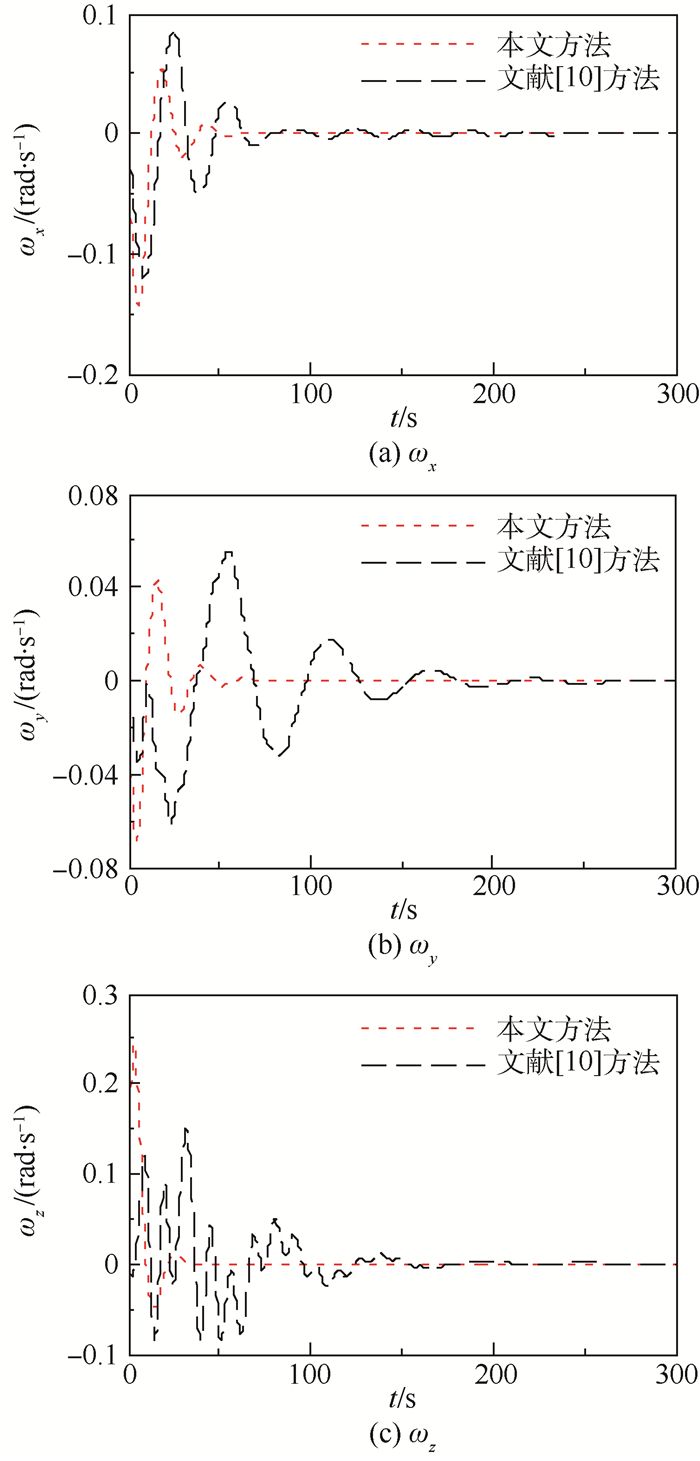
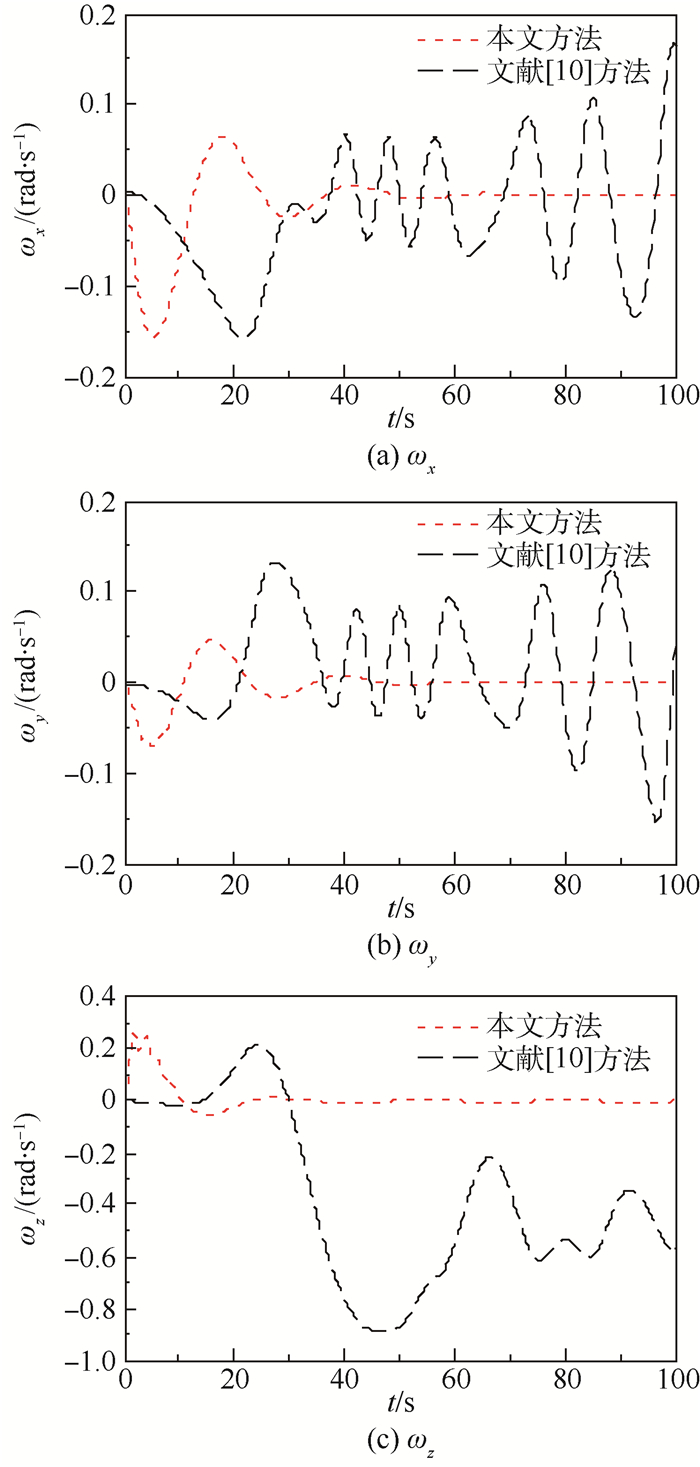
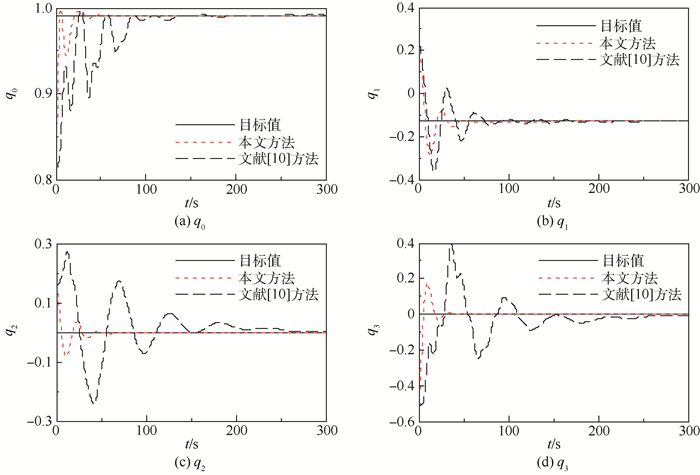
For the spacecraft attitude control problem in the presence of disturbance torques, a passivity control scheme based on port-controlled Hamiltonian (PCH) system model was proposed from the perspective of energy. By writing the attitude control system in a PCH form and adding the state related to integral of attitude error, the interconnection and damping assignment passivity-based control (IDA-PBC) method was then utilized to design the controller and provide the closed-loop system with desired internal interconnection structure and energy dissipativity properties. The proposed control scheme can guarantee input-to-state stability of closed-loop system. The actuator dynamics was then considered and backstepping control scheme was utilized to compensate for control command. Combined with command filtering technique, the computation of higher order derivatives of virtual control was avoided and uniform ultimate boundedness of the closed-loop system was proved theoretically. Simulation results validate the performance advantage of the proposed control scheme over that based on passivity alone.

| [1] |
LEE T.Global exponential attitude tracking controls on SO3[J].IEEE Transactions on Automatic Control, 2015, 60(10):2837-2842. doi: 10.1109/TAC.2015.2407452
|
| [2] |
DE ANGELIS E L, GIULIETTI F, DE RUITER A H J, et al.Spacecraft attitude control using magnetic and mechanical actuation[J].Journal of Guidance, Control, and Dynamics, 2016, 39(3):564-573. doi: 10.2514/1.G000957
|
| [3] |
RODRIQUEZ-VAZQUEZ A L, MARTIN-PRATS M A, BERNELLI-ZAZZERA F.Spacecraft magnetic attitude control using approximating sequence Riccati equations[J].IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4):3374-3385. doi: 10.1109/TAES.2015.130478
|
| [4] |
ALI I, RADICE G, KIM J.Backstepping control design with actuator torque bound for spacecraft attitude maneuver[J].Journal of Guidance, Control, and Dynamics, 2010, 33(1):254-259. doi: 10.2514/1.45541
|
| [5] |
ZHANG H, FANG J.Robust backstepping control for agile satellite using double-gimbal variable-speed control moment gyroscope[J].Journal of Guidance, Control, and Dynamics, 2013, 36(5):1356-1363. doi: 10.2514/1.59327
|
| [6] |
ZHU Z, XIA Y Q, FU M Y.Adaptive sliding mode control for attitude stabilization with actuator saturation[J].IEEE Transactions on Industrial Electronics, 2011, 58(10):4898-4907. doi: 10.1109/TIE.2011.2107719
|
| [7] |
LU K F, XIA Y Q, ZHU Z, et al.Sliding mode attitude tracking of rigid spacecraft with disturbances[J].Journal of the Franklin Institute, 2012, 349(2):413-440. doi: 10.1016/j.jfranklin.2011.07.019
|
| [8] |
WANG X K, YU C B.Unit dual quaternion-based feedback linearization tracking problem for attitude and position dynamics[J].Systems & Control Letters, 2013, 62(3):225-233. https://www.researchgate.net/publication/257012473_Unit_dual_quaternion-based_feedback_linearization_tracking_problem_for_attitude_and_position_dynamics
|
| [9] |
BAJODAH A H.Asymptotic generalised dynamic inversion attitude control[J].IET Control Theory & Applications, 2010, 4(5):827-840. https://www.researchgate.net/publication/224137618_Asymptotic_generalised_dynamic_inversion_attitude_control
|
| [10] |
FORBES J R.Passivity-based attitude control on the special orthogonal group of rigid-body rotations[J].Journal of Guidance, Control, and Dynamics, 2013, 36(6):1596-1605. doi: 10.2514/1.59270
|
| [11] |
WANG H L, XIE Y C.Passivity based attitude control of rigid bodies[J].Asian Journal of Control, 2014, 16(3):802-817. doi: 10.1002/asjc.2014.16.issue-3
|
| [12] |
PARK Y.Robust and optimal attitude control of spacecraft with disturbances[J].International Journal of Systems Science, 2015, 46(7):1222-1233. doi: 10.1080/00207721.2013.815824
|
| [13] |
ORTEGA R, VAN DER SCHAFT A, MASCHKE B, et al.Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems[J].Automatica, 2002, 38(4):585-596. doi: 10.1016/S0005-1098(01)00278-3
|
| [14] |
JELTSEMA D, ORTEGA R, SCHERPEN J M A.An energy-balancing perspective of interconnection and damping assignment control of nonlinear systems[J].Automatica, 2004, 40(9):1643-1646. doi: 10.1016/j.automatica.2004.04.007
|
| [15] |
ACOSTA J A, ORTEGA R, ASTOLFI A, et al.Interconnection and damping assignment passivity-based control of mechanical systems with underactuation degree one[J].IEEE Transactions on Automatic Control, 2005, 50(12):1936-1955. doi: 10.1109/TAC.2005.860292
|
| [16] |
BATLLE C, DÒRIA-CEREZO A, ESPINOSA-PEREZ G, et al.Simultaneous interconnection and damping assignment passivity-based control:The induction machine case study[J].International Journal of Control, 2009, 82(2):241-255. doi: 10.1080/00207170802050817
|
| [17] |
DONAIRE A, PETER T.Dynamic positioning of marine craft using a port-Hamiltonian framework[J].Automatica, 2012, 48(5):851-856. doi: 10.1016/j.automatica.2012.02.022
|
| [18] |
ZENG J W, ZHANG Z, QIAO W.An interconnection and damping assignment passivity-based controller for a DC-DC boost converter with a constant power load[J].IEEE Transactions on Industry Applications, 2014, 50(4):2314-2322. doi: 10.1109/TIA.2013.2290872
|
| [19] |
CRASTA N, ORTEGA R, PILLAI H K.On the matching equations of energy shaping controllers for mechanical systems[J].International Journal of Control, 2015, 88(9):1757-1765. doi: 10.1080/00207179.2015.1016453
|
| [20] |
AOKI T, YAMASHITA Y, TSUBAKINO D.Vibration suppression for mass-spring-damper systems with a tuned mass damper using interconnection and damping assignment passivity-based control[J].International Journal of Robust and Nonlinear Control, 2016, 26(2):235-251. doi: 10.1002/rnc.3307
|
| [21] |
NUNNA K, SASSANO M, ASTOLFI A.Constructive interconnection and damping assignment for port-controlled Hamiltonian systems[J].IEEE Transactions on Automatic Control, 2015, 60(9):2350-2361. doi: 10.1109/TAC.2015.2400663
|
| [22] |
ROMERO J G, DONAIRE A, ORTEGA R.Robust energy shaping control of mechanical systems[J].Systems & Control Letters, 2013, 62(9):770-780. https://www.researchgate.net/publication/261081678_Robust_energy_shaping_control_of_mechanical_systems
|
| [23] |
KRISTIANSEN R, HAGEN D.Modelling of actuator dynamics for spacecraft attitude control[J].Journal of Guidance, Control, and Dynamics, 2009, 32(3):1022-1025. doi: 10.2514/1.42574
|
| [24] |
HU Q L, XIAO B, WANG D W, et al.Attitude control of spacecraft with actuator uncertainty[J].Journal of Guidance, Control, and Dynamics, 2013, 36(6):1771-1776. doi: 10.2514/1.58624
|
| [25] |
DONG W, FARRELL J A, POLYCARPOU M M, et al.Command filtered adaptive backstepping[J].IEEE Transactions on Control Systems Technology, 2012, 20(3):566-580. doi: 10.1109/TCST.2011.2121907
|
| [26] |
KHALIL H K. 非线性系统[M]. 朱义胜, 董辉, 李作洲, 等译. 3版. 北京: 电子工业出版社, 2011: 96-118.
KHALIL H K.Nonlinear systems[M].ZHU Y S, DONG H, LI Z Z, et al, translated.3rd ed.Beijing:Publishing House of Electronics Industry, 2011:96-118(in Chinese).
|
| [27] |
ZOU Y, ZHENG Z.A robust adaptive RBFNN augmenting backstepping control approach for a model-scaled helicopter[J].IEEE Transactions on Control Systems Technology, 2015, 23(6):2344-2352. doi: 10.1109/TCST.2015.2396851
|
| [28] |
SUN L, ZUO Z.Nonlinear adaptive trajectory tracking control for a quad-rotor with parametric uncertainty[J].Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2015, 229(9):1709-1721. doi: 10.1177/0954410014558692
|
| [29] |
ZHU B, WANG Q, HUO W.Longitudinal-lateral velocity control design and implementation for a model-scaled unmanned helicopter[J].Nonlinear Dynamics, 2014, 76(2):1579-1589. doi: 10.1007/s11071-013-1230-z
|
Figures(5)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: