| Citation: | CHEN Xiang, HUANG Long, YANG Yanget al. Gravity compensation of an intraocular surgery robot based on computed torque method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(6): 1231-1238. doi: 10.13700/j.bh.1001-5965.2016.0455(in Chinese)

|
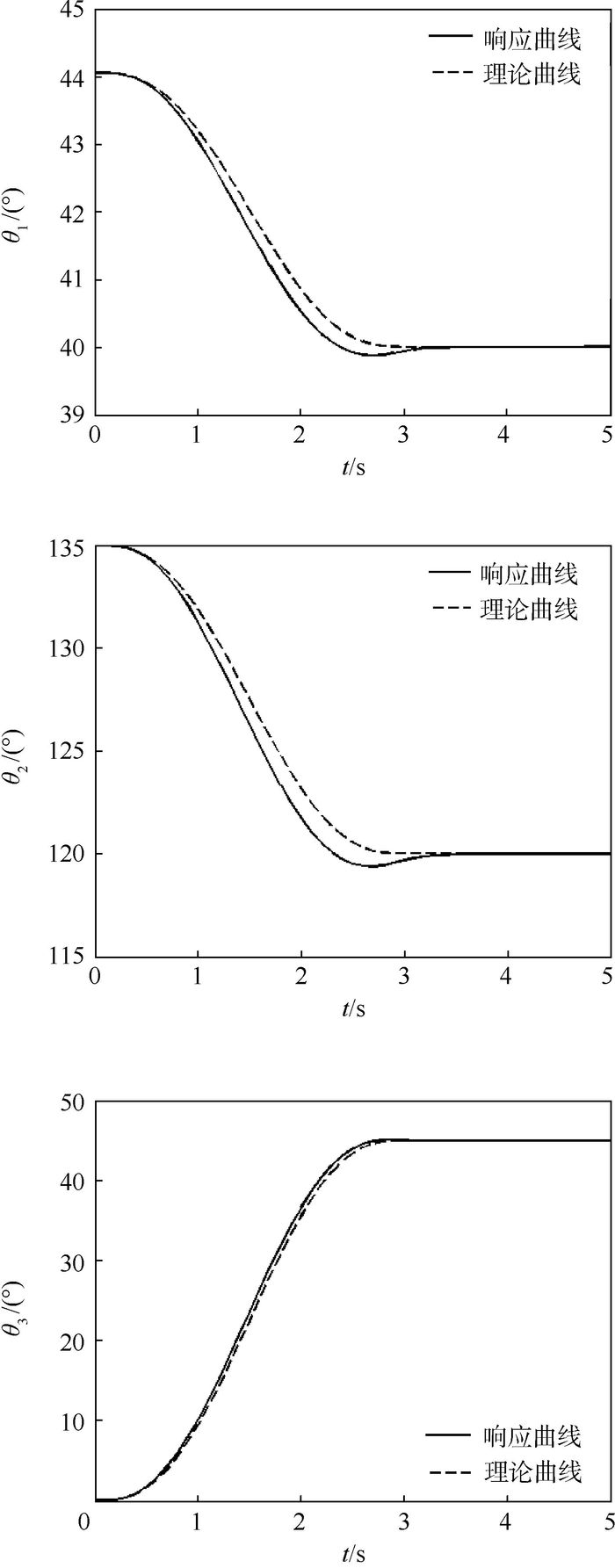
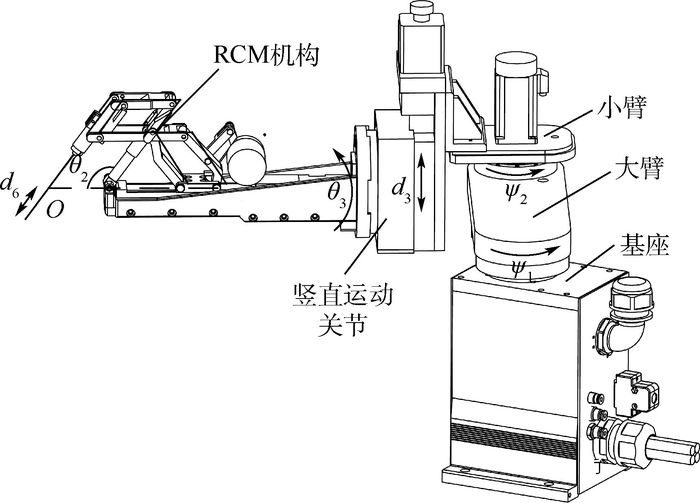
To improve the positioning accuracy and stability of an intraocular surgery robot which has a remote center of motion (RCM) mechanism, the coordinate system of the robot is established. Based on the equivalent system model, the instantaneous centroid position of model components is analyzed. The dynamic model of the robot system is built by using the Lagrange equation. On the basis of the dynamic model, the gravity compensation model is built by using computed torque method and it is simulated by using MATLAB/Simulink. Each joint motion response curve is compared between the independent proportional plus derivative(PD) control model and the gravity compensation model. The results of simulation show that the gravity compensation model can compensate the gravity effectively. The difference between response curve and expected curve of gravity compensation model is analyzed, which prove that the gravity compensation model has high precision and feasibility.

| [1] |
WEI W, GOLDMAN R, SIMAAN N, et al.Design and theoretical evaluation of micro-surgical manipulators for orbital manipulation and intraocular dexterity[C]//2007 IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 2007:3389-3395.
|
| [2] |
肖晶晶, 杨洋, 沈丽君, 等.视网膜血管搭桥手术机器人系统的研究[J].机器人, 2014, 36(3):293-299. http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201403006.htm
XIAO J J, YANG Y, SHEN L J, et al.A robotic system for retinal vascular bypass surgery[J].Journal of Robotics, 2014, 36(3):293-299(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201403006.htm
|
| [3] |
BECKER B C.Vision-based control of a handheld micromanipulator for robot-assisted retinal surgery[D].Pittsburgh:Carnegie Mellon University, 2012.
|
| [4] |
裴旭, 于靖军, 毕树生, 等.一维远程运动中心机构的型综合[J].机械工程学报, 2009, 45(2):144-148. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200902027.htm
PEI X, YU J J, BI S S, et al.Type synthesis for one-dimensional remote-center-of motion mechanisms[J].Journal of Mechanical Engineering, 2009, 45(2):144-148(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200902027.htm
|
| [5] |
黄龙, 杨洋, 苏鹏, 等.1R1T远程运动中心机构的型综合[J].机械工程学报, 2015, 51(13):131-136. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201513014.htm
HUANG L, YANG Y, SU P, et al.Type synthesis of 1R1T remote center of motion mechanisms[J].Journal of Mechanical Engineering, 2015, 51(13):131-136(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201513014.htm
|
| [6] |
GIJBELS A, WOUTERS N, STALMANS P, et al.Design and realisation of a novel robotic manipulator for retinal surgery[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), 2013.Piscataway, NJ:IEEE Press, 2013:3598-3603.
|
| [7] |
GIJBELS A, VANDER POORTEN E B, STALMANS P, et al.Design of a teleoperated robotic system for retinal surgery[C]//2014 IEEE International Conference on Robotics and Automation (ICRA).Piscataway, NJ:IEEE Press, 2014:2357-2363.
|
| [8] |
肖晶晶, 杨洋, 李大寨, 等.眼科显微手术机器人研究进展及关键技术分析[J].机械工程学报, 2013, 49(1):15-22. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201301004.htm
XIAO J J, YANG Y, LI D Z, et al.Advances and key techniques of ophthalmic microsurgical robots[J].Journal of Mechanical Engineering, 2013, 49(1):15-22(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201301004.htm
|
| [9] |
蔡自兴.机器人学基础[M].北京:机械工业出版社, 2009:6.
CAI Z X.Fundamentals of robotics[M].Beijing:China Machine Press, 2009:6(in Chinese).
|
| [10] |
LIU X, LI H, WANG J, et al.Dynamics analysis of flexible space robot with joint friction[J].Aerospace Science and Technology, 2015, 47:164-176. doi: 10.1016/j.ast.2015.09.030
|
| [11] |
刘善增, 余跃庆, 刘庆波, 等.3-R RC并联机器人动力学分析[J].机械工程学报, 2009, 45(5):220-224. http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGVE200100002168.htm
LIU S Z, YU Y Q, LIU Q B, et al.Dynamic analysis of 3-R RC parallel manipulator[J].Journal of Mechanical Engineering, 2009, 45(5):220-224(in Chinese). http://cpfd.cnki.com.cn/Article/CPFDTOTAL-ZGVE200100002168.htm
|
| [12] |
DE LUCA A, SICILIANO B, ZOLLO L.PD control with on-line gravity compensation for robots with elastic joints:Theory and experiments[J].Automatica, 2005, 41(10):1809-1819. doi: 10.1016/j.automatica.2005.05.009
|
| [13] |
龚捷, 鲍金锋, 衣冠超, 等.基于计算力矩法的装载机工作装置轨迹控制[J].机械工程学报, 2010, 46(13):141-146. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201013022.htm
GONG J, BAO J F, YI G C, et al.Trajectory-following control for manipulator of wheel loaders based on computed torque[J].Journal of Mechanical Engineering, 2010, 46(13):141-146(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201013022.htm
|
| [14] |
唐新星, 侯敬巍, 倪涛, 等.在线重力补偿下工程机器人自主作业轨迹跟踪性能分析[J].农业工程学报, 2013, 29(3):30-37. http://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201303007.htm
TANG X X, HOU J W, NI T, et al.Analysis on autonomous task trajectory tracking performance of construction robot with online gravity compensation[J].Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(3):30-37(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NYGU201303007.htm
|
| [15] |
CRAIG J J. Introduction to robotics:Mechanics and control[M].Upper Saddle River:Pearson Prentice Hall, 2005:62-100.
|
| [16] |
宗光华, 裴旭, 于靖军, 等.双平行四杆型远程运动中心机构的设计[J].机械工程学报, 2007, 43(12):103-108. doi: 10.3321/j.issn:0577-6686.2007.12.020
ZONG G H, PEI X, YU J J, et al.Design of double parallelogram remote-center-of-motion mechanisms[J].Chinese Journal of Mechanical Engineering, 2007, 43(12):103-108(in Chinese). doi: 10.3321/j.issn:0577-6686.2007.12.020
|
| [17] |
霍伟.机器人动力学与控制[M].北京:高等教育出版社, 2005:124-140.
HUO W.Robot dynamics and control[M].Beijing:Higher Education Press, 2005:124-140(in Chinese).
|
Figures(10) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: