| Citation: | ZHU Ridong, YANG Xiaoyuan, WANG Jingkaiet al. Convolution representation-based object tracking algorithm in Fourier domain[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(1): 151-159. doi: 10.13700/j.bh.1001-5965.2017.0038(in Chinese)

|
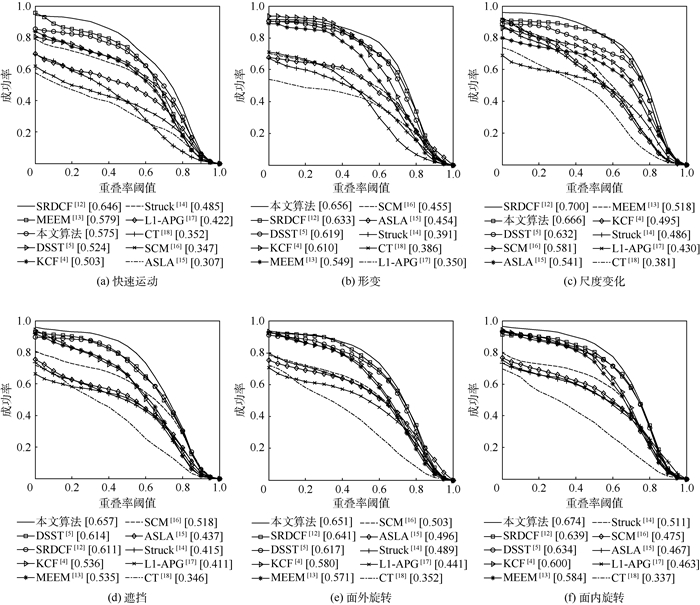
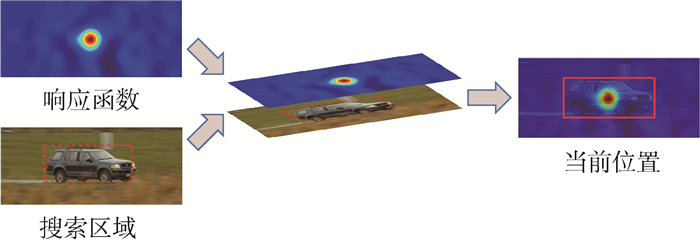
A novel object tracking algorithm based on convolution representation in Fourier domain is proposed for object tracking. Object tracking question can be treated as a convolution representation model. By finding the best filters, which reconstruct the target function with minimum loss, fast and robust object tracking can be realized. When the optimal multi-channel convolution representation model is mapped to the Fourier domain, it is equal to solving the least squares solution to linear equations. First, all solutions of the system of linear equations can be expressed through the theory of pseudo inverse, which provide a general format of convolution filters. Then, filters updated in the previous frame and feature templates extracted from current frame are used to generate current filters, and the pseudo inverse can be obtained fast through the full rank algorithm. Finally, tracking filters are updated and applied in both translation and scale. Experimental results on the object tracking benchmark (OTB) database show that our algorithm performs better than some state-of-the-art tracking methods in terms of accuracy and offers a general format to design filters.
| [1] |
YILMAZ A, JAVED O, SHAH M.Object tracking:A survey[J].ACM Computing Surveys, 2006, 38(4):1-45.
|
| [2] |
SMEULDERS A W M, CHU D M, CUCCHIARA R, et al.Visual tracking:An experimental survey[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2014, 36(7):1442-1468. doi: 10.1109/TPAMI.2013.230
|
| [3] |
BOLME D S, BEVERIDGE J R, DRAPER B A, et al.Visual object tracking using adaptive correlation filters[C]//2010 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2010:2544-2550.
|
| [4] |
HENRIQUES J, CASEIRO R, MARTINS P, et al.High-speed tracking with kernelized correlation filters[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(3):583-596. doi: 10.1109/TPAMI.2014.2345390
|
| [5] |
DANELLJAN M, HAGER G, KHAN F S, et al.Accurate scale estimation for robust visual tracking[C]//Proceedings of the British Machine Vision Conference 2014.Durham:BMVA Press, 2014:1-11.
|
| [6] |
KIANI H, SIM T, LUCEY S.Multi-channel correlation filters[C]//2013 IEEE International Conference on Computer Vision.Piscataway, NJ:IEEE Press, 2013:3072-3079.
|
| [7] |
BODDETI N V, KANADE T, KUMAR B V K V.Correlation filters for object alignment[C]//2013 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2013:2291-2298.
|
| [8] |
张跃辉.矩阵理论与应用[M].北京:科学出版社, 2011:207-231.
ZHANG Y H.Matrix theory and application[M].Beijing:Science Press, 2011:207-231(in Chinese).
|
| [9] |
PUNTANEN S, STYAN P H G, ISOTALO J.Matrix tricks for linear statistical models[M].Berlin:Springer-Verlag, 2011:349-350.
|
| [10] |
OPPENHEIM V A, WILLSKY S A.Signals and systems[M].Upper Saddle River:Prentice Hall, 1983:322.
|
| [11] |
DALAL N, TRIGGS B.Histograms of oriented gradients for human detection[C]//2005 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2005:886-893.
|
| [12] |
DANELLJAN M, HAGER G, KHAN S F, et al.Learning spatially regularized correlation filters for visual tracking[C]//2015 IEEE International Conference on Computer Vision.Piscataway, NJ:IEEE Press, 2015:4310-4318.
|
| [13] |
ZHANG J M, MA S G, SCLAROFF S.MEEM:Robust tracking via multiple experts using entropy minimization[C]//2014 European Conference on Computer Vision.Berlin:Springer-Verlag, 2014:188-203.
|
| [14] |
HARE S, GOLODETZ S, SAFFARI A, et al.Struck:Structured output tracking with kernels[C]//2011 IEEE International Conference on Computer Vision.Piscataway, NJ:IEEE Press, 2011:263-270.
|
| [15] |
JIA X, LU H C, YANG M H.Visual tracking via adaptive structural local sparse appearance model[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2012:1822-1829.
|
| [16] |
ZHONG W, LU H C, YANG M H.Robust object tracking via sparsity-based collaborative model[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2012:1838-1845.
|
| [17] |
BAO C L, WU Y, LING H B, et al.Real time robust L1 tracker using accelerated proximal gradient approach[C]//2012 IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ:IEEE Press, 2012:1830-1837.
|
| [18] |
ZHANG K H, ZHANG L, YANG M H.Real-time compressive tracking[C]//2012 European Conference on Computer Vision.Berlin:Springer-Verlag, 2012:866-879.
|
| [19] |
WU Y, LIM J, YANG M H.Object tracking benchmark[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9):1834-1848. doi: 10.1109/TPAMI.2014.2388226
|

Figures(8) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Zhu D, an. Analysis of oversteer/understeer characteristics of aircraft ground steering[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(12): 1594-1598. (in Chinese)





 DownLoad:
DownLoad: