| Citation: | ZHANG Lizhi, CHEN Diansheng, LIU Weihuiet al. Care robot indoor navigation method based on hybrid map[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(5): 991-1000. doi: 10.13700/j.bh.1001-5965.2017.0325(in Chinese)

|
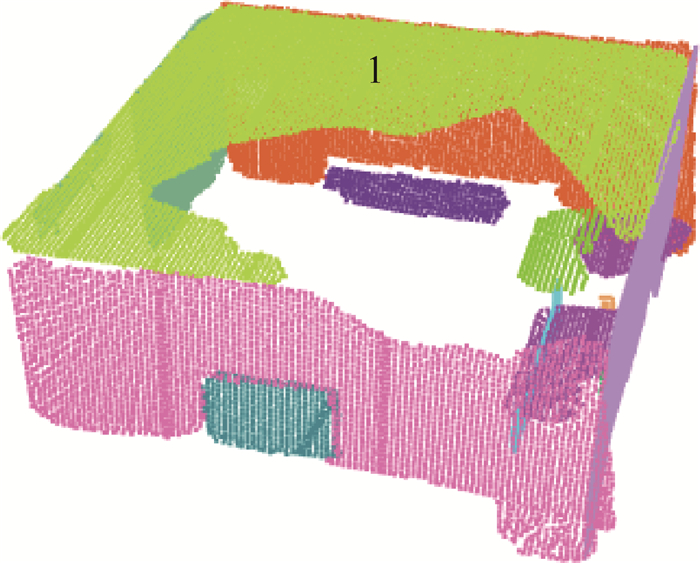
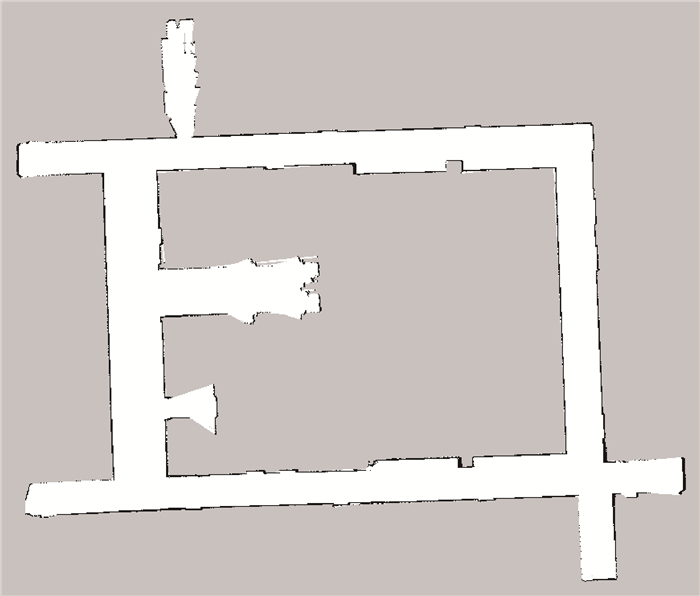
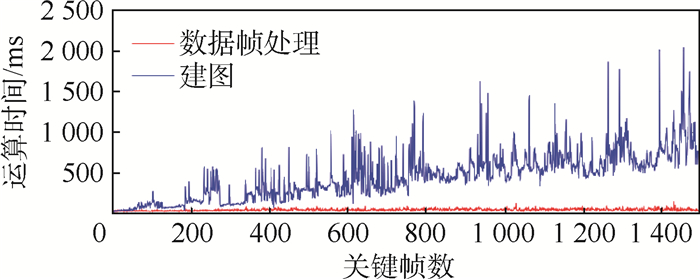
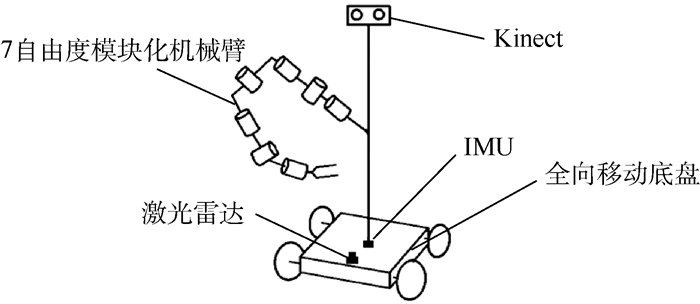
When the care robot is navigating in the indoor 3D structured environment, it is faced with the disadvantage of the large computational cost for map building and the lack of semantic information in the map. This paper presents a hybrid map building method based on point and plane features, which combines the advantages of point and plane features in the map building. Furthermore, an indoor navigation system is built based on the proposed hybrid map. First, point and plane features are fast extracted, and then data association is achieved using the interpretation tree approach. The smoothing and mapping tool is utilized to construct the factor graph and jointly optimize robot poses and landmarks, and the hybrid map is refined and updated. Second, the indoor navigation system is built, which implements the 3D obstacle detection, path planning and motion control. Finally, the indoor navigation experiments were carried out in a corridor environment. With the 2D occupancy grid map constructed by laser as the reference, the performance of map building and robot localization accuracy were analyzed, which proves that the indoor navigation system based on hybrid map shows its advantages in indoor structured environments.

| [1] |
WEINGARTEN J, SIEGWART R. 3D SLAM using planar segments[C]//2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2006: 3062-3067.
|
| [2] |
CASTELLANOS J A, TARDOS J D.Mobile robot localization and map building[M].Berlin:Springer, 1999:9-30.
|
| [3] |
LEE T K, LIM S, LEE S, et al. Indoor mapping using planes extracted from noisy RGB-D sensors[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2012: 1727-1733. http://ieeexplore.ieee.org/document/6385909/
|
| [4] |
KAESS M. Simultaneous localization and mapping with infinite planes[C]//2015 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2015: 4605-4611. http://ieeexplore.ieee.org/document/7139837/
|
| [5] |
KAESS M, RANGANATHAN A, DELLAERT F.iSAM:Incremental smoothing and mapping[J].IEEE Transactions on Robotics, 2008, 24(6):1365-1378. doi: 10.1109/TRO.2008.2006706
|
| [6] |
TREVOR A J B, ROGERS J G, CHRISTENSEN H I. Planar surface SLAM with 3D and 2D sensors[C]//2012 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2012: 3041-3048. http://ieeexplore.ieee.org/document/6225287/
|
| [7] |
TAGUCHI Y, JIAN Y D, RAMALINGAM S, et al. Point-plane SLAM for hand-held 3D sensors[C]//2013 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2013: 5182-5189. http://ieeexplore.ieee.org/document/6631318/
|
| [8] |
ATAER-CANSIZOGLU E, TAGUCHI Y, RAMALINGAM S, et al. Tracking an RGB-D camera using points and planes[C]//2013 IEEE International Conference on Computer Vision Workshops. Piscataway, NJ: IEEE Press, 2013: 51-58. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.407.5933
|
| [9] |
SALAS-MORENO R F, GLOCKEN B, KELLY P H J, et al. Dense Planar SLAM[C]//2014 IEEE International Symposium on Mixed and Augmented Reality. Piscataway, NJ: IEEE Press, 2014: 157-164.
|
| [10] |
ZHANG L Z, CHEN D S, LIU W H. Point-plane SLAM based on line-based plane segmentation approach[C]//2016 IEEE International Conference on Robotics and Biomimetics. Piscataway, NJ: IEEE Press, 2016: 1287-1292.
|
| [11] |
QUIGLEY M, CONLEY K, GERKEY B P, et al. ROS: An open-source robot operating system[C]//ICRA Workshop on Open Source Software. Piscataway, NJ: IEEE Press, 2009: 1-6.
|
| [12] |
DELLAERT F. Factor graphs and GTSAM: A hands-on introduction: GT-RIM-CP&R-2012-02[R]. Altalanta: Georgia Institute of Technology, 2012: 1-26.
|
| [13] |
RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: An efficient alternative to SIFT or SURF[C]//2011 IEEE International Conference on Computer Vision. Piscataway, NJ: IEEE Press, 2011: 2564-2571. http://ieeexplore.ieee.org/document/6126544/?reload=true&arnumber=6126544
|
| [14] |
ZHANG L Z, CHEN D S, LIU W H.Fast plane segmentation with line primitives for RGB-D sensor[J].International Journal of Advanced Robotic Systems, 2016, 13(6):1-8. doi: 10.1177/1729881416665846
|
| [15] |
RUSU R B, COUSINS S. 3D is here: Point cloud library (PCL)[C]//2011 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2011: 1-4.
|
| [16] |
KLEIN G, MURRAY D. Parallel tracking and mapping for small AR workspaces[C]//IEEE and ACM International Symposium on Mixed and Augmented Reality. Piscataway, NJ: IEEE Press, 2008: 225-234.
|
| [17] |
MUR-ARTAL R, TARDOS J D.ORB-SLAM2:An open-source SLAM system for monocular, stereo and RGB-D cameras[J].IEEE Transactions on Robotics, 2017, 33(5):1255-1262. doi: 10.1109/TRO.2017.2705103
|
| [18] |
GAD A, MAJDI F, FAROOQ M. A comparison of data association techniques for target tracking in clutter[C]//2002 IEEE International Conference on Information Fusion. Piscataway, NJ: IEEE Press, 2002: 1126-1133. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.462.1485
|
| [19] |
POPPINGA J, VASKEVICIUS N, BIRK A, et al. Fast plane detection and polygonalization in noisy 3D range images[C]//2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2008: 3378-3383. http://ieeexplore.ieee.org/document/4650729/
|
| [20] |
KAESS M, JOHANNSSON H, ROBERTS R, et al.iSAM2:Incremental smoothing and mapping using the Bayes tree[J].International Journal of Robotics Research, 2012, 31(2):216-235. https://marinerobotics.mit.edu/isam2-incremental-smoothing-and-mapping-using-bayes-tree
|
| [21] |
KAMMERL J, BLODOW N, RUSU R B, et al. Real-time compression of point cloud streams[C]//2012 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2012: 778-785.
|
| [22] |
HART P E, NILSSON N J, RAPHAEL B.A formal basis for the heuristic determination of minimum cost paths[J].IEEE Transactions on Systems Science & Cybernetics, 1968, 4(2):100-107. http://www.cs.auckland.ac.nz/compsci709s2c/resources/Mike.d/astarNilsson.pdf
|
| [23] |
FOX D, BURGARD W, THRUN S.The dynamic window approach to collision avoidance[J].IEEE Robotics & Automation Magazine, 1997, 4(1):23-33.
|
| [24] |
GRISETTIYZ G, STACHNISS C, BURGARD W. Improving grid-based SLAM with Rao-Blackwellized particle filters by adaptive proposals and selective resampling[C]//2005 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2005: 2432-2437.
|
| [25] |
STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2012: 573-580. http://ieeexplore.ieee.org/document/6385773/
|
Figures(22) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: