| Citation: | CAO Shuangqian, YUAN Peijiang, CHEN Dongdong, et al. Calibration method for laser beam direction and zero point of laser displacement sensor[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6): 1321-1327. doi: 10.13700/j.bh.1001-5965.2017.0450(in Chinese)

|
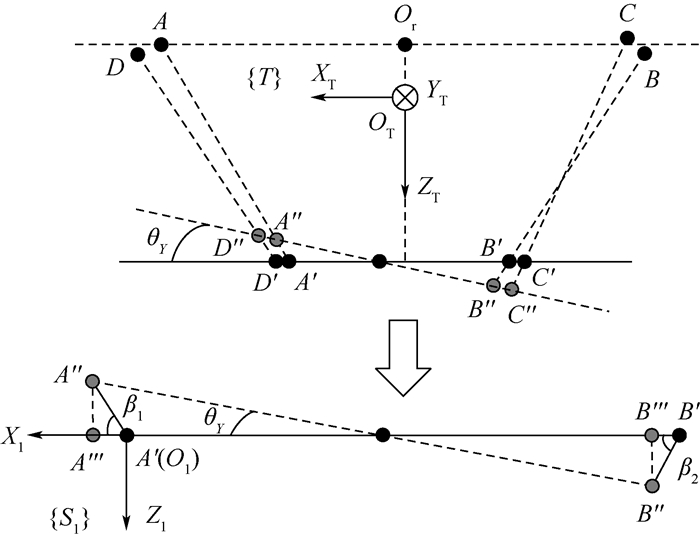
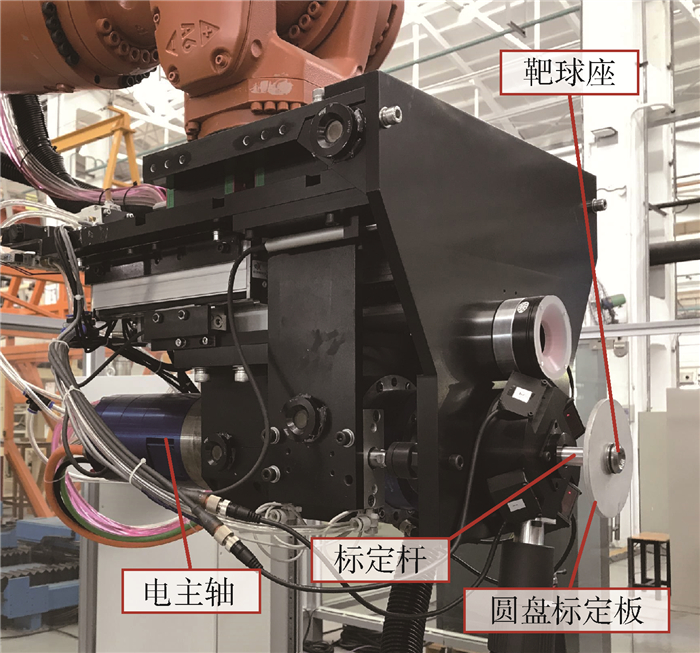
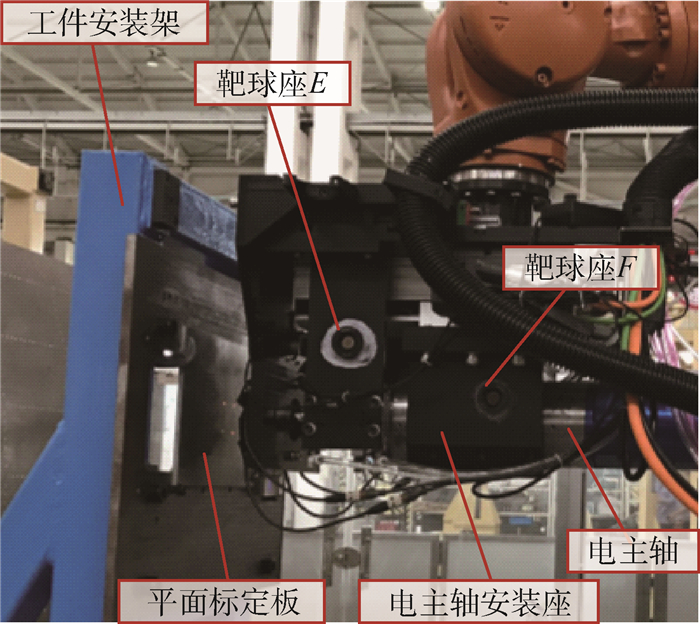
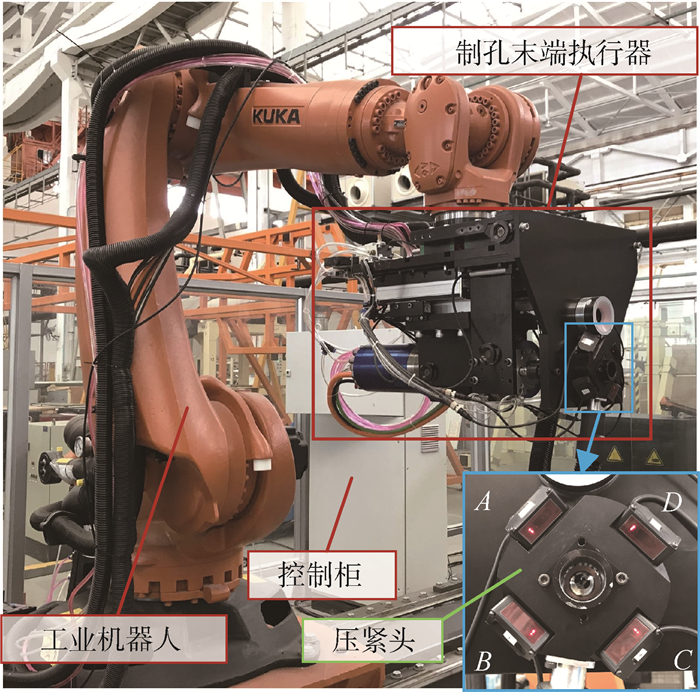
Laser displacement sensor is usually used in normal detection of aircraft panel. To solve the problem of the decrease of normal detection accuracy caused by machining and installing errors of laser displacement sensor, a calibration method based on math model and least square method was proposed and applied, which can calibrate the laser beam direction and zero point of laser displacement sensor. First, angle calibration theory was used to obtain the angle between laser beam and spindle feed direction. Then coordinate systems were built by a laser tracker. According to the measurements of laser displacement sensors when they detect the planes which have different angles with feed direction of the spindle, geometry math model was used to calculate the relative coordinates of all laser points. The space equations of laser beams were fitted by the least square method, so laser beam directions and zero points came out. Finally, calibration experiment was carried out in aviation drilling robot platform, and verification experiment was made according to the calibration result. The experimental results show that the method can precisely calibrate the laser beam direction and zero point of laser displacement sensor and the normal detection accuracy is 0.18°.

| [1] |
王珉, 薛少丁, 陈文亮, 等.面向飞机自动化装配的单向压紧制孔毛刺控制技术[J].航空制造技术, 2011(9):26-29. http://www.cqvip.com/QK/91463A/201109/1001909338.html
WANG M, XUE S D, CHEN W L, et al.One-side pressed burless drilling technology for aircraft automatic assembly[J].Aeronautical Manufacturing Technology, 2011(9):26-29(in Chinese). http://www.cqvip.com/QK/91463A/201109/1001909338.html
|
| [2] |
冯晓波. 机器人准确制孔技术研究[D]. 杭州: 浙江大学, 2011: 1-6. http://cdmd.cnki.com.cn/Article/CDMD-10335-1011069040.htm
FENG X B. Research on robot precision drilling[D]. Hangzhou: Zhejiang University, 2011: 1-6(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10335-1011069040.htm
|
| [3] |
曹国顺. 工业机器人精确制孔试验研究[D]. 杭州: 浙江大学, 2012: 1-2. http://cdmd.cnki.com.cn/Article/CDMD-10335-1012321190.htm
CAO G S. Research on industry robot precision drilling[D]. Hangzhou: Zhejiang University, 2012: 1-2(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10335-1012321190.htm
|
| [4] |
YUAN P J, WANG Q S, SHI Z Y, et al.A micro-adjusting attitude mechanism for autonomous drilling robot end-effector[J].Science China Information Sciences, 2014, 57(12):120203. https://www.researchgate.net/publication/278391725_A_micro-adjusting_attitude_mechanism_for_autonomous_drilling_robot_end-effector
|
| [5] |
薛汉杰, 张敬佩.蒙皮类部件钻孔法向的测量和调整[J].航空制造技术, 2010(23):60-62. doi: 10.3969/j.issn.1671-833X.2010.23.010
XUE H J, ZHANG J P.Normal measurement and adjustment for skin drilling[J].Aeronautical Manufacturing Technology, 2010(23):60-62(in Chinese). doi: 10.3969/j.issn.1671-833X.2010.23.010
|
| [6] |
宋腾, 张凤生, 任锦霞.直射式激光位移传感器光束入射角对测量精度的影响[J].机械, 2017, 44(2):37-41. http://cdmd.cnki.com.cn/Article/CDMD-10446-2008125318.htm
SONG T, ZHANG F S, REN J X.Effect of the beam incident angle of direct-incident type laser displacement sensor on mea-suring precision[J].Machinery, 2017, 44(2):37-41(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10446-2008125318.htm
|
| [7] |
孙彬, 李兵.一种量化的激光位移传感器倾角误差补偿模型[J].仪器仪表学报, 2015, 36(5):996-1004. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yqyb201505005
SUN B, LI B.A quantitative error compensation model of the inclination angle of the laser displacement sensor[J].Chinese Journal of Scientific Instrument, 2015, 36(5):996-1004(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=yqyb201505005
|
| [8] |
宁光芳, 甘泉.激光位移传感器误差补偿的仿真分析[J].激光杂志, 2016, 37(4):37-40. http://www.cqvip.com/QK/91041X/201604/668620810.html
NING G F, GAN Q.Simulation and analysis of error compensation of laser displacement sensor[J].Laser Journal, 2016, 37(4):37-40(in Chinese). http://www.cqvip.com/QK/91041X/201604/668620810.html
|
| [9] |
ZHU A Z, TANG B Q, LI J, et al.Calibration of laser displacement sensor used by industrial robots[J].Optical Engineering, 2004, 43(1):12-13. doi: 10.1117/1.1631935
|
| [10] |
出晓岚, 王磊, 胡天林, 等.坐标测量机激光位移测头的标定方法研究[J].仪器仪表学报, 2008, 29(4):426-429. http://cpfd.cnki.com.cn/Article/CPFDTOTAL-YQYB200806002113.htm
CHU X L, WANG L, HU T L, et al.Study on calibration method of laser displacement sensor coordinates measurement machine[J].Chinese Journal of Scientific Instrument, 2008, 29(4):426-429(in Chinese). http://cpfd.cnki.com.cn/Article/CPFDTOTAL-YQYB200806002113.htm
|
| [11] |
卢科青, 王文, 陈子辰.点激光测头激光束方向标定[J].光学精密工程, 2010, 18(4):880-886. http://www.cqvip.com/QK/92835A/201004/33749733.html
LU K Q, WANG W, CHEN Z C.Calibration of laser beam-direction for point laser sensors[J].Optics and Precision Engineering, 2010, 18(4):880-886(in Chinese). http://www.cqvip.com/QK/92835A/201004/33749733.html
|
| [12] |
毕超, 房建国, 刘京亮, 等.基于球形目标的激光位移传感器光束方向标定[J].光学精密工程, 2015, 23(3):678-685. http://www.cnki.com.cn/Article/CJFDTotal-GXJM201503010.htm
BI C, FANG J G, LIU J L, et al.Calibration of beam direction of laser displacement sensor based on spherical target[J].Optics and Precision Engineering, 2015, 23(3):678-685(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-GXJM201503010.htm
|
| [13] |
毕超, 吕来鹏, 刘勇, 等. 非线性最小二乘法在激光束方向标定中的应用[C]//2015年第二届中国航空科学技术大会, 2015, 20: 542-546.
BI C, LV L P, LIU Y, et al. Application of nonlinear least squares method in calibration of the laser beam direction[C]//China Aeronautical Science and Technology Conference, 2015, 20: 542-546(in Chinese).
|
| [14] |
ZHOU A, GUO J, SHAO W, et al.A segmental calibration method for a miniature serial-link coordinate measuring machine using a compound calibration artefact[J].Measurementence & Technology, 2013, 24(6):065001. http://adsabs.harvard.edu/abs/2013MeScT..24f5001Z
|
| [15] |
王胜华, 都东, 张文增, 等.机器人定点变位姿手-眼标定方法[J].清华大学学报(自然科学版), 2007, 47(2):165-168. http://mall.cnki.net/magazine/Article/QHXB200702001.htm
WANG S H, DU D, ZHANG W Z, et al.Hand-eye calibration for the robot by measuring a fixed point from different poses[J].Journal of Tsinghua University(Science and Technology), 2007, 47(2):165-168(in Chinese). http://mall.cnki.net/magazine/Article/QHXB200702001.htm
|
| [16] |
REN Y J, YIN S B, ZHU J G.Calibration technology in application of robot-laser scanning system[J].Optical Engineering, 2012, 51(11):114204. doi: 10.1117/1.OE.51.11.114204
|
| [17] |
袁康正, 朱伟东, 陈磊, 等.机器人末端位移传感器的安装位置标定方法[J].浙江大学学报(工学版), 2015, 49(5):829-834. http://www.cqvip.com/QK/90076X/201505/665074569.html
YUAN K Z, ZHU W D, CHEN L, et al.Approach for calibrating position of displacement sensor mounted on robot end-effector[J].Journal of Zhejiang University(Engineering Science), 2015, 49(5):829-834(in Chinese). http://www.cqvip.com/QK/90076X/201505/665074569.html
|
| [18] |
袁康正. 激光位移传感器安装位置标定及其应用研究[D]. 杭州: 浙江大学, 2015: 26-46. http://cdmd.cnki.com.cn/Article/CDMD-10335-1015630426.htm
YUAN K Z. Approach for calibrating the position of laser displacement sensor and its application[D]. Hangzhou: Zhejiang University, 2015: 26-46(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10335-1015630426.htm
|
| [19] |
王战玺, 李飞飞, 王宁, 等. 工业机器人精准制孔的四点法向调平方法: 201510133460. 6[P]. 2015-08-05.
WANG Z X, LI F F, WANG N, et al. Four point normal leveling method for precise hole making of industrial robot: 201510133460. 6[P]. 2015-08-05(in Chinese).
|
Figures(6) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: