| Citation: | YAN Xufei, CHEN Renliang. Helicopter autorotation landing trajectory optimization after tail-rotor total failure[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6): 1203-1212. doi: 10.13700/j.bh.1001-5965.2017.0459(in Chinese)

|
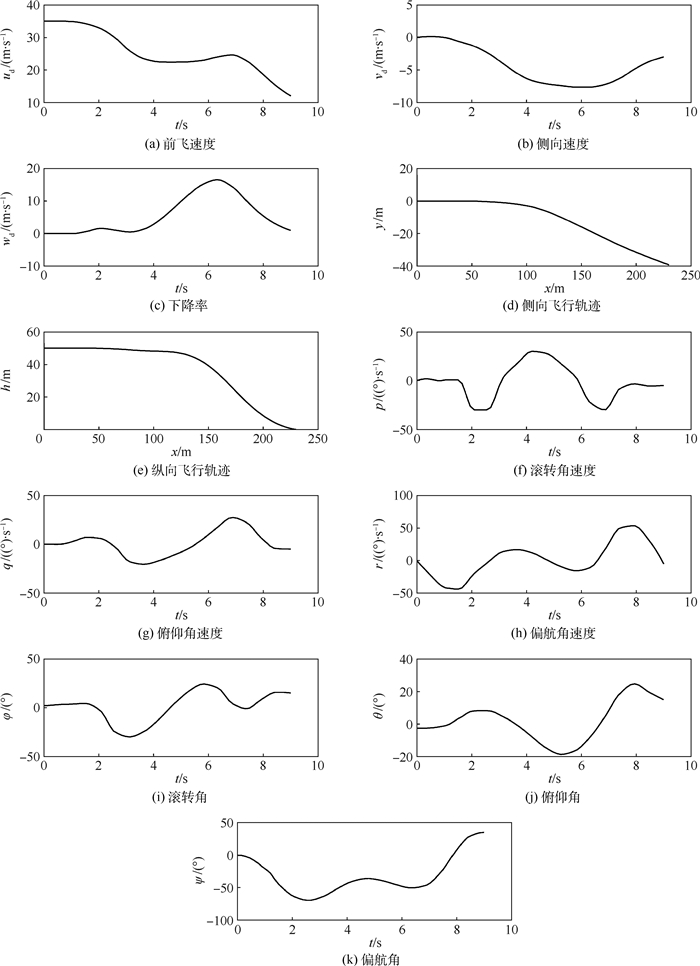
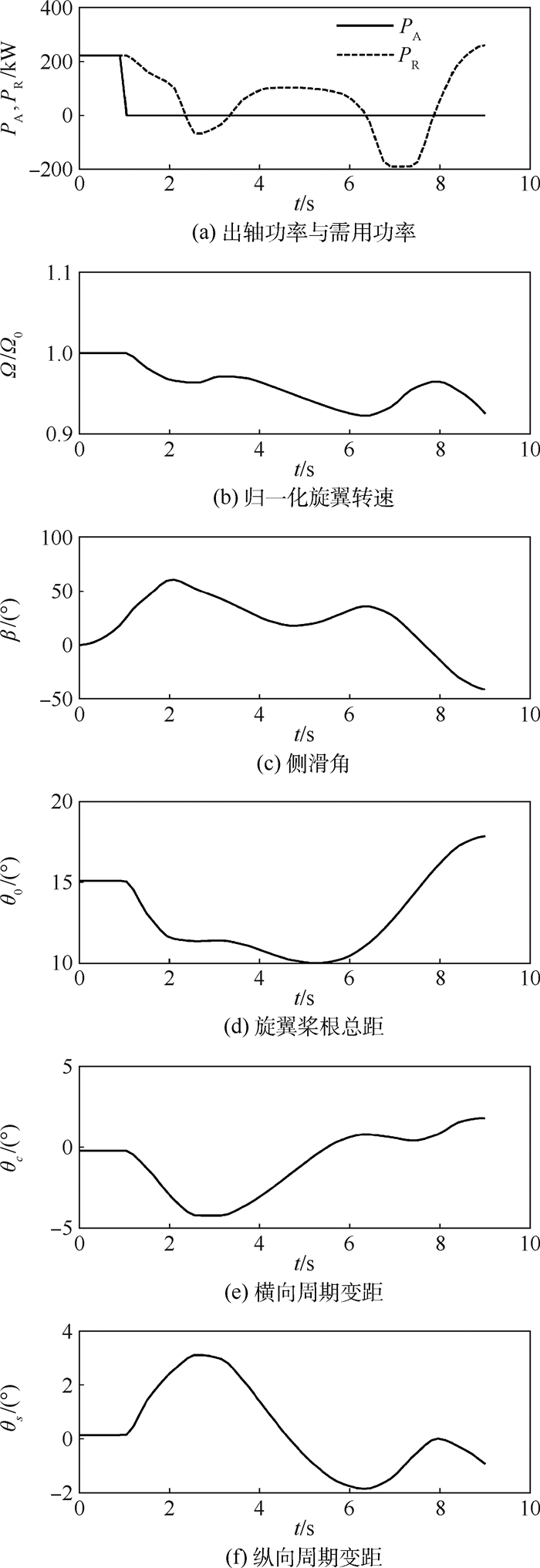
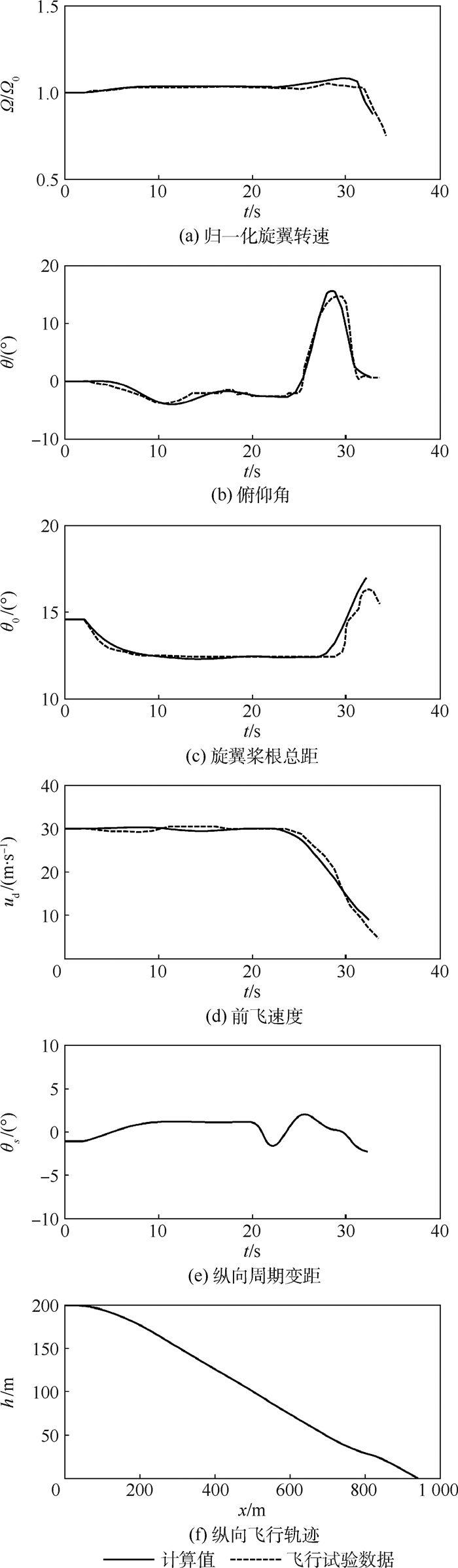
The optimal landing trajectory and control process of helicopter autorotation after tail-rotor total failure is studied using optimal control method. A six-degree-of-freedom rigid-body flight dynamic model was developed with equations describing the tail-rotor total failure and the available shaft power as well as the rotor speed variation in the autorotation landing procedure. The autorotation landing procedure after tail-rotor total failure was transcribed into an optimal control problem and solved by numerical method. A single-rotor helicopter with tail rotor was taken as the sample, and the calculated optimal autorotation landing procedure in engine failure was in good agreement with the flight test data, which shows that the flight dynamic model and the optimal control method are feasible. Finally, the helicopter optimal autorotation landing procedure after tail-rotor total failure in cruising speed was investigated, and the results show that:when the tail-rotor fails, the airframe will experience large variations of yaw rate and sideslip angle under the effect of rotor anti-torque, which leads to a complex coupled flight. Therefore, the pilot who turned off the engine and is operating the autorotation landing needs an extra series of controls to stabilize the roll and yaw attitude through lateral cyclic pitch and sideslip. The optimal trajectory and the control process are in line with the qualitative conclusions and recommendations obtained from the engineering flight tests.

| [1] |
孙杰, 高艳辉.直升机尾桨故障及其试飞研究[J].飞行力学, 2001, 19(4):67-69. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fxlx200104016
SUN J, GAO Y H.The helicopter tail-rotor failure and the flight test[J].Flight Mechanics, 2001, 19(4):67-69(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fxlx200104016
|
| [2] |
于琦, 章海红.直升机尾桨机械性失效及试飞研究[J].飞行力学, 2008, 26(3):74-77. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fxlx200803020
YU Q, ZHANG H H.Analysis of the tail-rotor failure from mechanical malfunction and research in flight test[J].Flight Mechanics, 2008, 26(3):74-77(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fxlx200803020
|
| [3] |
赵敬超.直升机尾桨失效分析及试飞技术研究[J].航空科学技术, 2015, 26(3):70-73. http://www.cnki.com.cn/Article/CJFDTotal-HKKX201503016.htm
ZHAO J C.Helicopter tail rotor failure analysis and flight test technology research[J].Aeronautical Science & Technology, 2015, 26(3):70-73(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-HKKX201503016.htm
|
| [4] |
张海.某型直升机尾桨桨距操纵杆断裂故障分析[J].航天制造技术, 2010(4):29-32. https://www.wenkuxiazai.com/doc/76a9467d5ef7ba0d4a733bc9.html
ZHANG H.Fault analysis of an operating lever's rupture in helicopter[J].Aerospace Manufacturing Technology, 2010(4):29-32(in Chinese). https://www.wenkuxiazai.com/doc/76a9467d5ef7ba0d4a733bc9.html
|
| [5] |
李春光, 舒平, 马晓明, 等.直升机尾桨连杆组件失效分析[J].失效分析与预防, 2013, 8(6):346-349. http://www.cqvip.com/QK/88392X/201306/48691305.html
LI C G, SHU P, MA X M, et al.Failure analysis on tailor rotor rod components of a helicopter[J].Failure Analysis and Prevention, 2013, 8(6):346-349(in Chinese). http://www.cqvip.com/QK/88392X/201306/48691305.html
|
| [6] |
艾剑波, 黄文俊, 李满福, 等.直11型机尾桨变距拉杆故障分析与处理[J].直升机技术, 2009(3):68-71. http://mall.cnki.net/magazine/Article/ZSEN200903018.htm
AI J B, HUANG W J, LI M F, et al.The analysis and treatment on tail rotor pitch-link failure of Z11 helicopter[J].Helicopter Technique, 2009(3):68-71(in Chinese). http://mall.cnki.net/magazine/Article/ZSEN200903018.htm
|
| [7] |
GOODMAN N, BAYOUMI A, BLECHERTAS V, et al. CBM component testing at the University of South Carolina: AH-64 tail rotor gearbox studies[C]//American Helicopter Society Technical Specialists' Meeting on Condition Based Maintenance. Grapevine, Texas: AHS, 2009: 1-8.
|
| [8] |
SINGH H K, PAWAR P M, GANGULI R, et al.On the effect of mass and stiffness unbalance on helicopter tail rotor system behavior[J].Aircraft Engineering and Aerospace Technology, 2008, 80(2):129-138. doi: 10.1108/00022660810859355
|
| [9] |
胡和平.动力学分析在某直升机尾桨故障分析中的应用[J].直升机技术, 2009(3):21-24. http://www.cqvip.com/QK/83376X/200903/1000870362.html
HU H P.Application of dynamic analysis in helicopter tail rotor failure analysis[J].Helicopter Technique, 2009(3):21-24(in Chinese). http://www.cqvip.com/QK/83376X/200903/1000870362.html
|
| [10] |
O'ROURKE M J.Simulation model for tail rotor failure[J].Journal of Aircraft, 1994, 31(1):197-205. doi: 10.2514/3.46474
|
| [11] |
GARCIA R D, VALAVANIS K P, KANDEL A. Autonomous helicopter navigation during a tail rotor failure utilizing fuzzy logic[C]//Proceedings of the 15th Mediterranean Conference on Control & Automation. Piscataway, NJ: IEEE Press, 2007: 1-6.
|
| [12] |
JOHNSON W. Helicopter optimal descent and landing after power loss: NASA TM-73244[R]. Washington, D. C. : NASA, 1977.
|
| [13] |
LEE A Y, BRYSON A E, HINDSON W S.Optimal landing of a helicopter in autorotation[J].Journal of Guidance, Control, and Dynamics, 1988, 11(1):7-12. doi: 10.2514/3.20262
|
| [14] |
CHEN R T N, ZHAO Y. Optimal trajectories for the helicopter in one-engine-inoperative terminal area operations: NASA TM-110400[R]. Washington, D. C. : NASA, 1996.
|
| [15] |
OKUNO Y, KEIJI K, AKIRA A.Analytical prediction of height-velocity diagram of a helicopter using optimal theory[J].Journal of Guidance, Control, and Dynamics, 1991, 14(2):453-459. doi: 10.2514/3.20659
|
| [16] |
BIBIK P, NARKIEWICZ J.Helicopter optimal control after power failure using comprehensive dynamic model[J].Journal of Guidance, Control, and Dynamics, 2012, 35(4):1354-1362. doi: 10.2514/1.51371
|
| [17] |
BOTTASSO C L, MAISANO G, SCORCELLETTI F.Trajectory optimization procedures for rotorcraft vehicles, their software implementation, and applicability to models of increasing complexity[J].Journal of the American Helicopter Society, 2010, 55(3):32010. doi: 10.4050/JAHS.55.032010
|
| [18] |
孟万里, 陈仁良.直升机单发失效后自转着陆轨迹优化[J].航空学报, 2011, 32(9):1599-1607. http://cdmd.cnki.com.cn/Article/CDMD-10287-2007194125.htm
MENG W L, CHEN R L.Trajectory optimization of helicopter autorotation landing after one engine failure[J].Acta Aeronautica et Astronautica Sinica, 2011, 32(9):1599-1607(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-2007194125.htm
|
| [19] |
MENG W L, CHEN R L.Study of helicopter autorotation landing following engine failure based on a six-degree-of-freedom rigid-body dynamic model[J].Chinese Journal of Aeronautics, 2013, 26(6):1380-1388. doi: 10.1016/j.cja.2013.07.041
|
| [20] |
孟万里. 直升机单台发动机失效后飞行轨迹优化研究和应用[D]. 南京: 南京航空航天大学, 2014: 27-57. http://cdmd.cnki.com.cn/Article/CDMD-10287-1015951833.htm
MENG W L. Study and application of trajectory optimization for helicopter flight after one engine failure[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014: 27-57(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1015951833.htm
|
| [21] |
KIM C J, SUNG S, PARK S H, et al.Numerical time-scale separation for rotorcraft nonlinear optimal control analyses[J].Journal of Guidance, Control, and Dynamics, 2014, 37(2):658-673. doi: 10.2514/1.59557
|
| [22] |
KIM S. Certification of transport category rotorcraft: 29-2C[S]. Washington: Federal Aviation Administration, Department of Transportation, 2014: 57-146.
|
| [23] |
GILL P E, MURRAY W, SAUNDERS M A. User's guide for SNOPT version 7: Software for large-scale nonlinear programming[D]. San Diego: University of California, 2007: 4-29.
|
| [24] |
牛永红, 杨百兴.Z11直升机自转着陆试飞[J].飞行力学, 2001, 19(3):74-76. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=fhlx200103020&dbname=CJFD&dbcode=CJFQ
NIU Y H, YANG B X.Flight test of Z11 helicopter autorotation landing[J].Flight Dynamics, 2001, 19(3):74-76(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=fhlx200103020&dbname=CJFD&dbcode=CJFQ
|
Figures(3) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: