| Citation: | GAO Dong, SONG Zhibin, ZHAO Yaruet al. Disturbance observer applied in a nonlinear stiffness compliant actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6): 1328-1336. doi: 10.13700/j.bh.1001-5965.2017.0477(in Chinese)

|
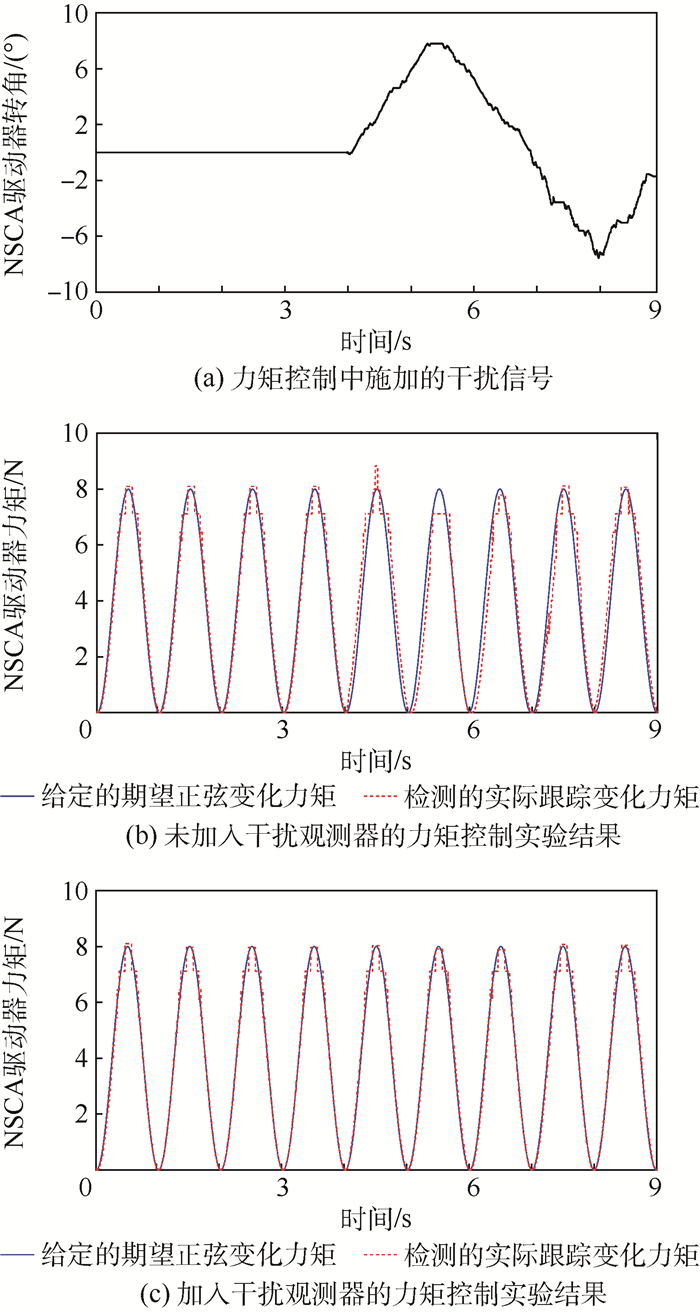
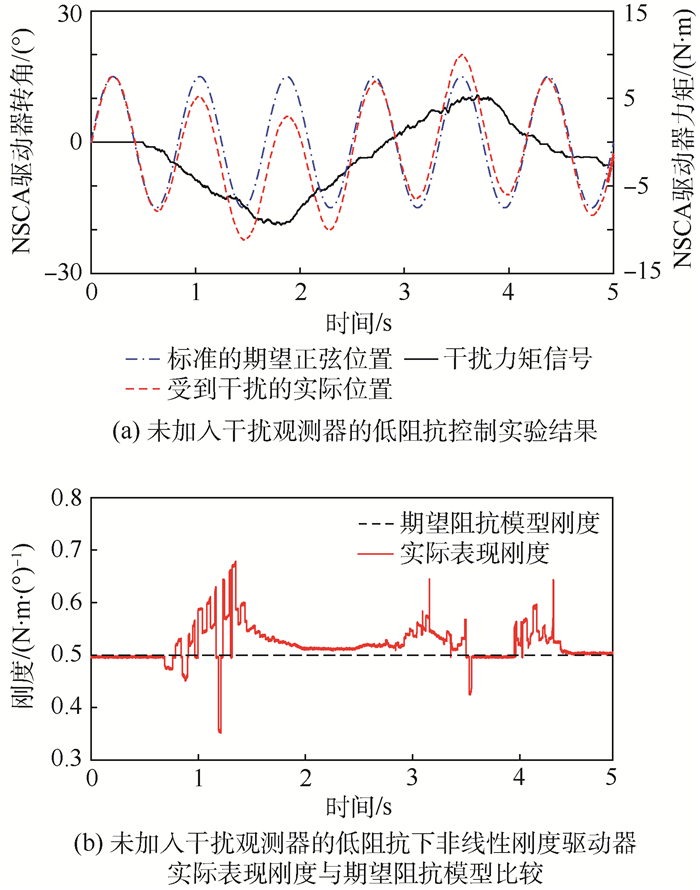
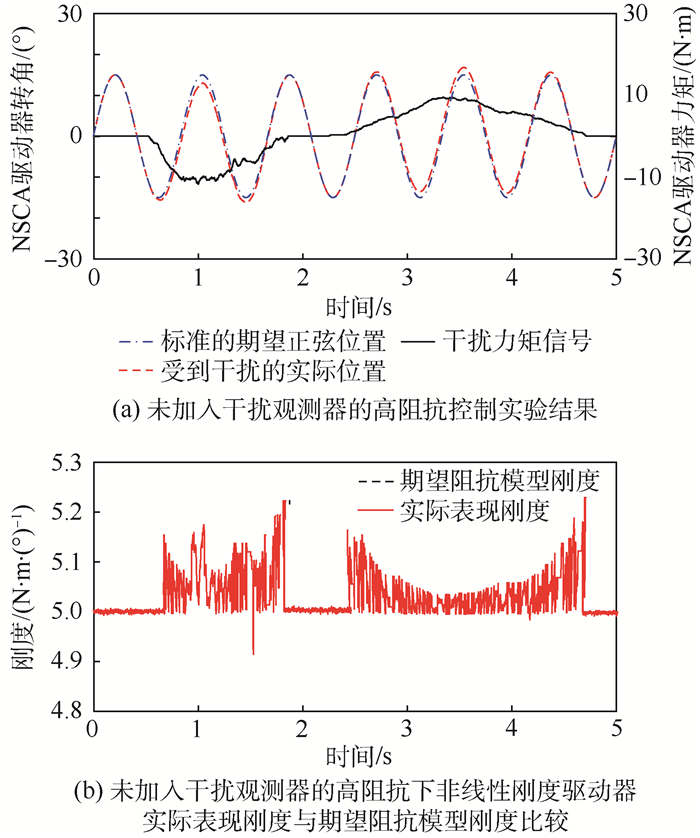
According to "low load, low stiffness; high load, high stiffness", nonlinear stiffness compliant actuators (NSCA) are developed to optimize the workspace of variable stiffness actuators (VSA). Besides, NSCAs are able to perform high force resolution under small interactive force and fast response under large interactive force. However, because it is difficult to set up accurate mathematic models for interference and noise in the complex human robot interaction environment, control accuracy of the system is deteriorated severely. Thus, disturbance observer (DOB), which evaluates disturbance based on observation and then compensates error, is discussed in this paper to settle these problems for NSCA. First, control system state function and DOB are built up according to dynamic model of NSCA. Lyapunov stability is used to analyze system stability and stable conditions are given. Second, based on the stable conditions, DOB control scheme is applied in NSCA control system to obtain experimental data. Finally, the experimental results shows that, using DOB reduces stiffness error of NSCA by 85.71% in the mode of impedance control and enhances control precision of the actuator obviously.

| [1] |
GRIOLI G, WOLF S, GARABINI M, et al.Variable stiffness actuators:The user's point of view[J].International Journal of Robotics Research, 2015, 34(6):727-743. doi: 10.1177/0278364914566515
|
| [2] |
SCHIAVI R, GRIOLI G, SEN S, et al. VSA-Ⅱ: A novel prototype of variable stiffness actuator for safe and performing robots interacting with humans[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2008: 2171-2176.
|
| [3] |
BYRVAN H, SUGAR T G, VANDERBORGHT B, et al.Compliant actuator design[J].IEEE Robotics & Automation Magazine, 2009, 16(3):81-94. https://www.scientific.net/AMM.163.23
|
| [4] |
ERLER P, BECKERLE P, STRAH B, et al. Experimental comparison of nonlinear motion control methods for a variable stiffness actuator[C]//Biomedical Robotics & Biomechatronics. Piscataway, NJ: IEEE Press, 2014: 1045-1050.
|
| [5] |
SCHEPELMANN A, GEBERTH K A, GEYER H. Compact nonlinear springs with user defined torque-deflection profiles for series elastic actuators[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2014: 3411-3416.
|
| [6] |
WOLF S, HIRZINGER G. A new variable stiffness design: Matching requirements of the next robot generation[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2008: 1741-1746.
|
| [7] |
TORREALBA R R, UDELMAN S B.Design of cam shape for maximum stiffness variability on a novel compliant actuator using differential evolution[J].Mechanism & Machine Theory, 2016, 95:114-124. https://www.sciencedirect.com/science/article/pii/S0094114X15002074
|
| [8] |
JAFARI A, TSAGARAKIS N G, CALDWELL D G. AwAS-Ⅱ: A new actuator with adjustable stiffness based on the novel principle of adaptable pivot point and variable lever ratio[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 2011: 4638-4643.
|
| [9] |
NICOLA S, MASAFUMI O.Design and Realization of a non-circular cable spool to synthesize a nonlinear rotational spring[J].Advanced Robotics, 2012, 26(3-4):234-251. doi: 10.1163/156855311X614545
|
| [10] |
PEW C, KLUTE G K.Design of lower limb prosthesis transverse plane adaptor with variable stiffness[J].Journal of Medical Devices, 2015, 9(3):035001. doi: 10.1115/1.4030505
|
| [11] |
AUSTIN J, SCHEPELMANN A, GEYER H. Control and evaluation of series elastic actuators with nonlinear rubber springs[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2015: 6563-6568.
|
| [12] |
PALLI G, BERSELLI G, MELCHIORRI C, et al.Design of a variable stiffness actuator based on flexures[J].Journal of Mechanisms & Robotics, 2011, 3(3):034501.
|
| [13] |
YU H, HUANG S, CHEN G, et al.Human-robot interaction control of rehabilitation robots with series elastic actuators[J].IEEE Transactions on Robotics, 2015, 31(5):1089-1100. doi: 10.1109/TRO.2015.2457314
|
| [14] |
NAKAO M, OHNISHI K, MIYACHI K. A robust decentralized joint control based on interference estimation[C]//IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE Press, 1987: 326-331.
|
| [15] |
SARIYILDIZ E, OHNISHI K.Analysis the robustness of control systems based on disturbance observer[J].International Journal of Control, 2013, 86(10):1733-1743. doi: 10.1080/00207179.2013.795663
|
| [16] |
SARIYILDIZ E, CHEN G, YU H. Robust position control of a novel series elastic actuator via disturbance observer[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2015: 5423-5428.
|
| [17] |
SARIYILDIZ E, OHNISHI K.Stability and robustness of disturbance-observer-based motion control systems[J].IEEE Transactions on Industrial Electronics, 2015, 62(1):414-422. doi: 10.1109/TIE.2014.2327009
|
| [18] |
尹正男. 具有鲁棒性的最优干扰观测器的系统性设计及其应用[D]. 上海: 上海交通大学, 2012: 2-3.
YIN Z N. Systematic design of optimal disturbance observer with robust performances and its application[D]. Shanghai: Shanghai Jiao Tong University, 2012: 2-3(in Chinese).
|
| [19] |
SARIYILDIZ E, OHNISHI K.A guide to design disturbance observer[J].Journal of Dynamic Systems Measurement & Control, 2013, 136(2):2483-2488. https://scholars.uow.edu.au/display/publication115264
|
| [20] |
LAN S B, SONG Z B.Design of a new nonlinear stiffness compliant actuator and its error compensation method[J].Journal of Robotics, 2016, 2016:7326905. https://www.researchgate.net/publication/309586340_Design_of_a_New_Nonlinear_Stiffness_Compliant_Actuator_and_Its_Error_Compensation_Method
|
| [21] |
CHEN W H, BALLANCE D J, GAWTHROP P J, et al.A nonlinear disturbance observer for robotic manipulators[J].IEEE Transactions on Industrial Electronics, 2000, 47(4):932-938. doi: 10.1109/41.857974
|
| [22] |
HOGAN N.Impedance control-An approach to manipulation.Ⅰ-Theory.Ⅱ-Implementation.Ⅲ-Applications[J].ASME Transactions Journal of Dynamic Systems & Measurement Control B, 1984, 107(1):304-313.
|
| [23] |
STIENENW A H, HEKMAN E E, TER B H, et al.Design of a rotational hydroelastic actuator for a powered exoskeleton for upper limb rehabilitation[J].IEEE Transactions on Bio-medical Engineering, 2010, 57(3):728-735. doi: 10.1109/TBME.2009.2018628
|
| [24] |
WANG P R, CHIU Y H, TSAI M S, et al. Estimation and evaluation of upper limb endpoint stiffness and joint torques for post-stroke rehabilitation[C]//World Congress on Medical Physics and Biomedical Engineering, 2009. Berlin: Springer, 2009: 44-47.
|
| [25] |
VITIELLO N, LENZI T, ROCCELLA S, et al.NEUROExos:A powered elbow exoskeleton for physical rehabilitation[J].IEEE Transactions on Robotics, 2013, 29(1):220-235. doi: 10.1109/TRO.2012.2211492
|
| [26] |
MALOSIO M, CAIMMI M, LEGNANI G, et al. LINarm: A low-cost variable stiffness device for upper-limb rehabilitation[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway, NJ: IEEE Press, 2014: 3598-3603.
|

Figures(11)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: