| Citation: | SUN Jian, FU Yongling, HE Jie, et al. Indoor TOA ranging value optimization method based on nonlinear programming[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(8): 1636-1642. doi: 10.13700/j.bh.1001-5965.2017.0641(in Chinese)

|
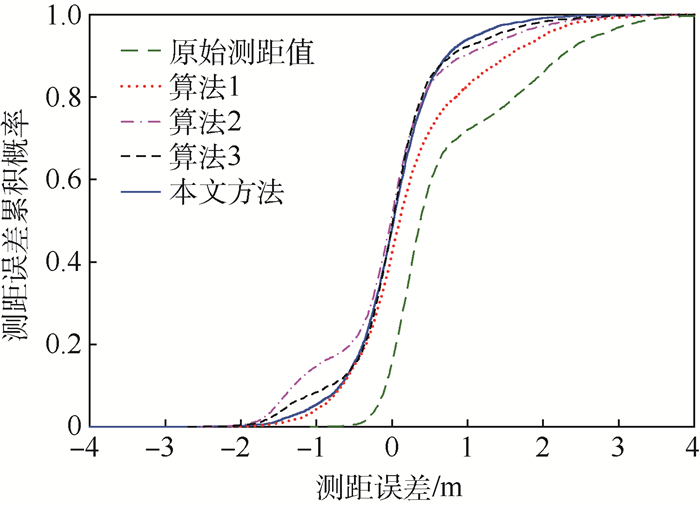
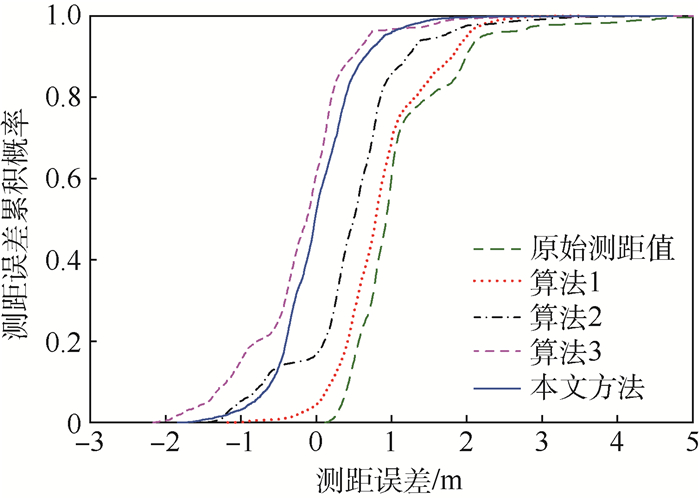
The ranging accuracy of time of arrival (TOA) based indoor positioning system is significantly affected by multipath and non-line-of-sight (NLOS) of wireless channel in indoor environment. And these effects result in large measurement error and positioning error. In this paper, the optimization of distance is defined as a nonlinear programming problem. Based on the detection of line of sight (LOS) and NLOS, TOA ranging error model and geometric constraints between target and base stations are used to define the initial values, objective functions and constraint conditions for sequential quadratic nonlinear programming method effectively calibrates the positioning distance value. The typical TOA range error model is used for simulation. Field validation uses wireless positioning nodes with TOA ranging functions in the office environment. The results show that the ranging accuracy of the proposed algorithm is much higher than original range value and the other traditional distance mitigation algorithms, which verifies the effectiveness of the proposed algorithm.
| [1] |
AMUNDSON I, KOUTSOUKOS X D. A survey on localization for mobile wireless sensor networks[C]//Proceedings Mobile Entity Localization and Tracking in GPS-less Environnments. Berlin: Springer, 2009, 1: 235-254.
|
| [2] |
王佳伟, 王敬东, 赵强, 等.基于CSS的室内测距优化技术[J].指挥控制与仿真, 2016, 38(3):131-135.
WANG J W, WANG J D, ZHAO Q, et al.Optimization techniques for indoor ranging based on CSS[J].Command Control and Simulation, 2016, 38(3):131-135(in Chinese).
|
| [3] |
李伟杰, 张霆廷, 张钦宇.基于机器学习的超宽带NLOS鉴别方法[J].计算机工程与设计, 2014, 35(3):750-754. doi: 10.3969/j.issn.1000-7024.2014.03.003
LI W J, ZHANG T T, ZHANG Q Y.Identification of ultra wideband NLOS based on machine learning[J].Computer Engineering and Design, 2014, 35(3):750-754(in Chinese). doi: 10.3969/j.issn.1000-7024.2014.03.003
|
| [4] |
WANG Z, ZEKAVAT S A.Omnidirectional mobile NLOS identification and localization via multiple cooperative nodes[J].IEEE Transactions on Mobile Computing, 2012, 11(12):47-59.
|
| [5] |
徐彤阳.基于减法聚类的TOA/AOA定位方法研究[J].电子测量技术, 2013, 36(10):91-93. doi: 10.3969/j.issn.1002-7300.2013.10.023
XU T Y.Research on TOA/AOA location method based on subtractive clustering[J].Electronic Measurement Technology, 2013, 36(10):91-93(in Chinese). doi: 10.3969/j.issn.1002-7300.2013.10.023
|
| [6] |
HEIDARI M, AKGUL F O, PAHLAVAN K. Neural network assisted identification of the absence of direct path in indoor localization[C]//IEEE Global Telecommunications Conference. Piscataway, NJ: IEEE Press, 2007: 387-392.
|
| [7] |
HEIDARI M, ALSINDI A N, PAHLAVAN K.UDP identification and error mitigation in TOA-based indoor localization systems using neural network architecture[J].IEEE Transactions on Wireless Communications, 2009, 8(7):3597-3607. doi: 10.1109/TWC.2009.080415
|
| [8] |
RAO N S V, XU X, SAHNI S. A computational geometry method for TDOA triangulation[C]//IEEE International Conference on Information Fusion. Piscataway, NJ: IEEE Press, 2007: 1-7.
|
| [9] |
ARIAS-DE-REYNA E.A maximum likelihood UWB localization algorithm exploiting knowledge of the service area layout[J].Wireless Personal Communications, 2013, 69(4):1413-1426. doi: 10.1007/s11277-012-0642-2
|
| [10] |
PARK C H, CHANG J H.TOA source localization based on weighted least squares estimator in LOS/NLOS mixture environments[J].International Journal of Distributed Sensor Networks, 2016, 12(12):44-53.
|
| [11] |
LIANG S C, LIAO L H, LEE Y C.Localization algorithm based on improved weighted centroid in wireless sensor networks[J].Journal of Networks, 2014, 9(1):183-189.
|
| [12] |
WANG Y, ZHENG F, WIEMELER M, et al. Reference selection for hybrid TOA/RSS linear least squares localization[C]//2013 IEEE 78th Vehicular Technology Conference. Piscataway, NJ: IEEE Press, 2013: 1-5.
|
| [13] |
HE J, GENG Y, PAHLAVAN K.Toward accurate human tracking:Modelling time-of-arrival for wireless wearable sensors in multipath environment[J].IEEE Sensors Journal, 2014, 14(11):122-145.
|
| [14] |
GHASSEMZADEH S S.The ultra-wideband indoor path loss model[J].IEEE Communication Letters, 2002, 7(2):58-66.
|
| [15] |
HEIDARI M, AKGUL F O, PAHLAVAN K.Identification of the absence of direct path in ToA-based indoor localization systems[J].International Journal of Wireless Information Networks, 2008, 12(3-4):117-127. doi: 10.1007/s10776-008-0084-7
|
| [16] |
CAO M, ANDERSON B, MORSE A S.Sensor network localization with imprecise distances[J].Systems & Control Letters, 2006, 55(11):887-893.
|
| [17] |
AKGUL F O.Modeling the behavior of multipath components pertinent to indoor geolocation[M].New York:Worcester Polytechnic Institute, 2010:89-93.
|
| [18] |
WANN C D, CHIN H C. Hybrid TOA/RSSI wireless location with unconstrained nonlinear optimization for indoor UWB channels[C]//2007 IEEE Wireless Communications and Networking Conference. Piscataway, NJ: IEEE Press, 2007: 3940-3945.
|
| [19] |
BOGGS P, TOLLE J.Sequential quadratic programming[J].Acta Numerica, 1995, 4(4):1-51. doi: 10.1007%2F0-387-22742-3_18
|
| [20] |
ALAVI B, PAHLAVAN K.Modeling of the TOA based distance measurement error using UWB indoor radio measurements[J].IEEE Communication Letters, 2006, 10(4):275-277. doi: 10.1109/LCOMM.2006.1613745
|
| [21] |
MARANO S, GIFFORD W M, WYMEERSCH H, et al.NLOS identification and mitigation for localization based on UWB experimental data[J].IEEE Journal on Selected Areas in Communications, 2010, 28(7):1026-1035. doi: 10.1109/JSAC.2010.100907
|
| [22] |
HATAMI A. Application of channel modeling for indoor localization using TOA and RSS[D]. New York: Worcester Polytechnic Insititute, 2006: 42-47.
|


Figures(4) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Hu Lei, Zhang Li-dan, Wang Tianmiaoet al. Application of qualitative error analysis method in the mechanical navigation system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(01): 83-87. (in Chinese)





 DownLoad:
DownLoad: