| Citation: | GONG Xiao, HUANG Jinguo, CHEN Hongyu, et al. Dynamics modeling and kinematics calculation of webbed-feet during cormorant's take-off[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10): 2096-2105. doi: 10.13700/j.bh.1001-5965.2018.0030(in Chinese)

|
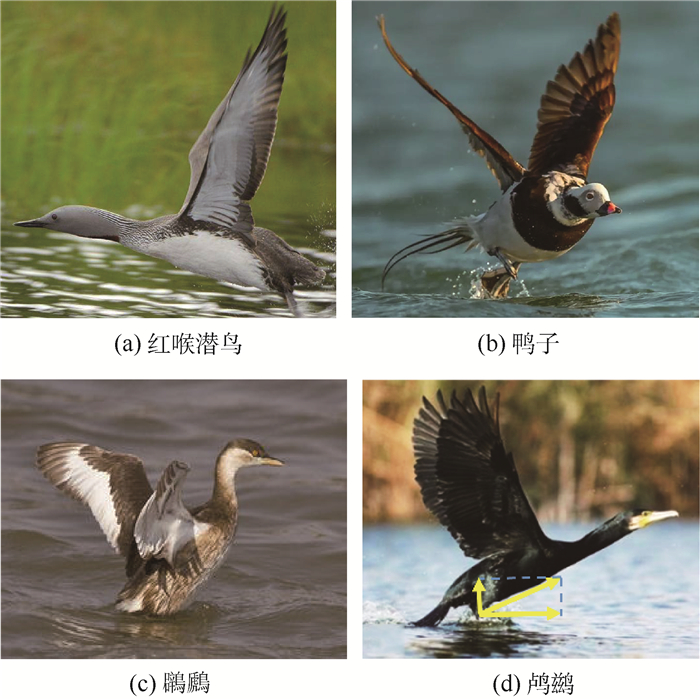
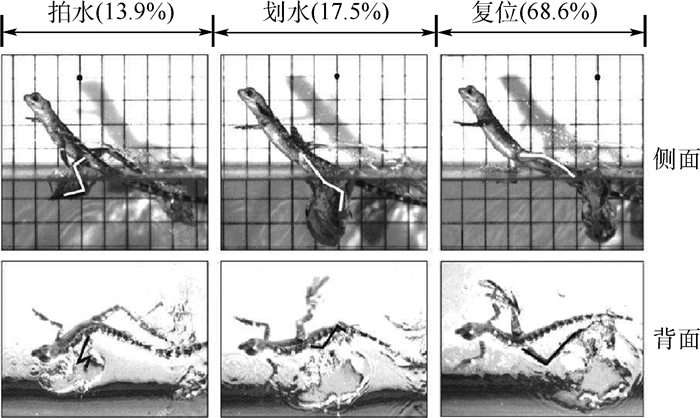
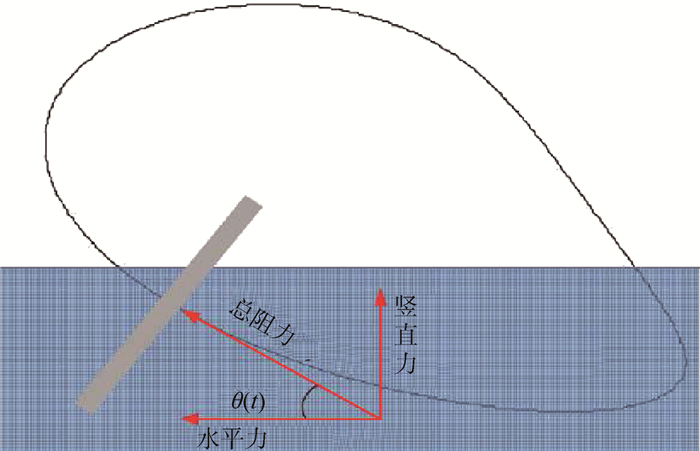
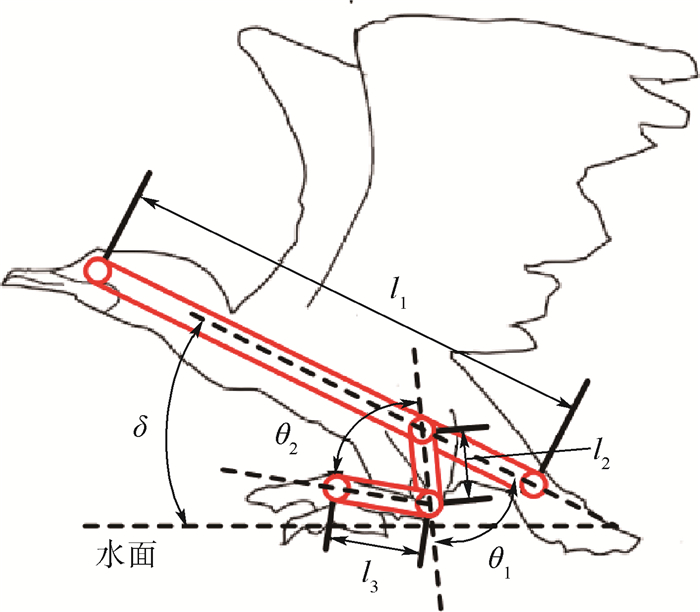
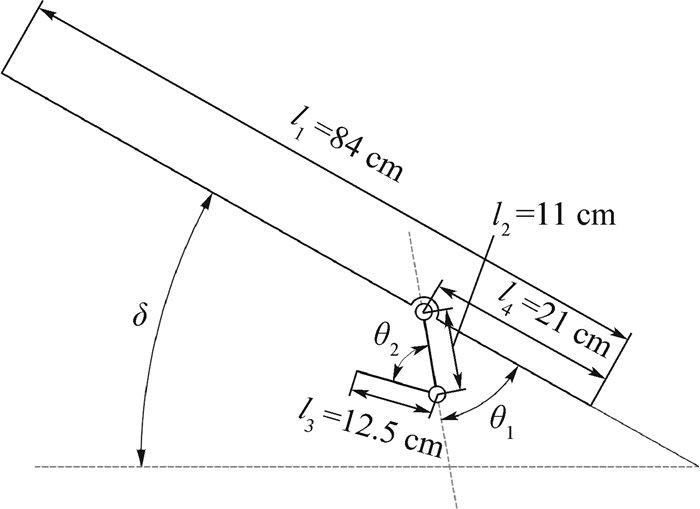
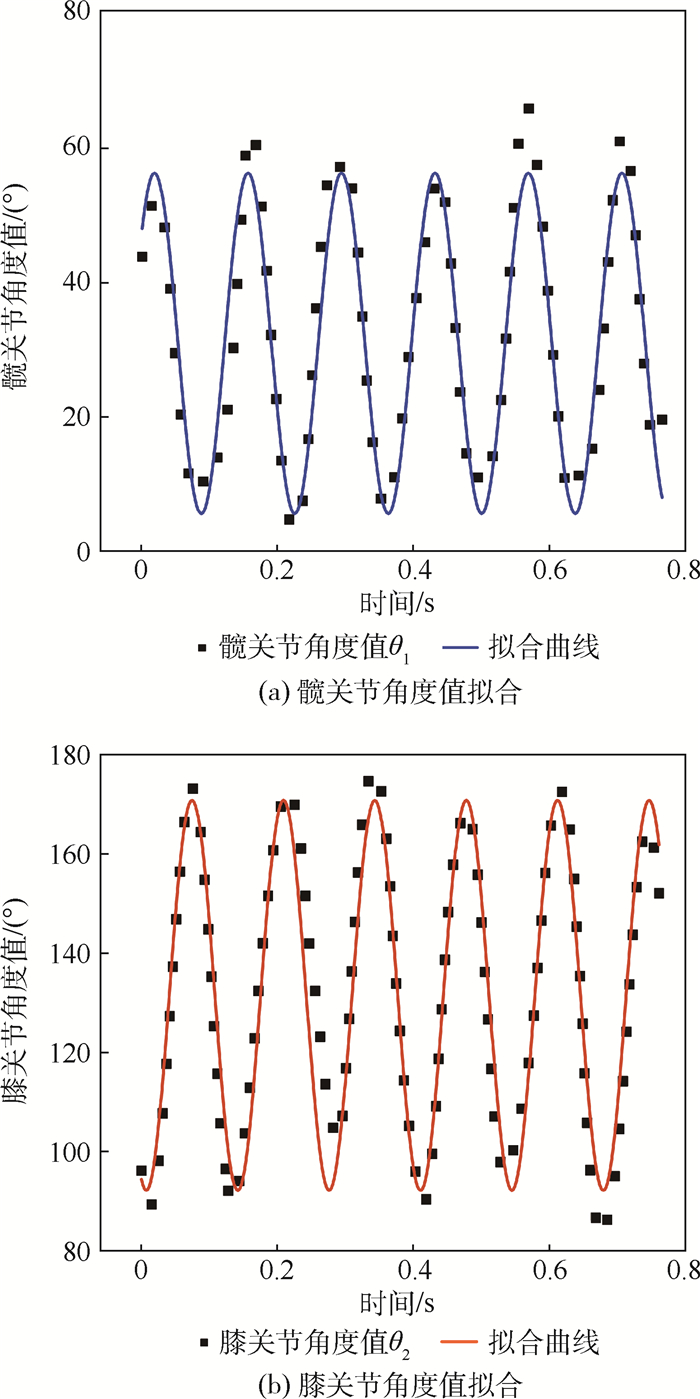
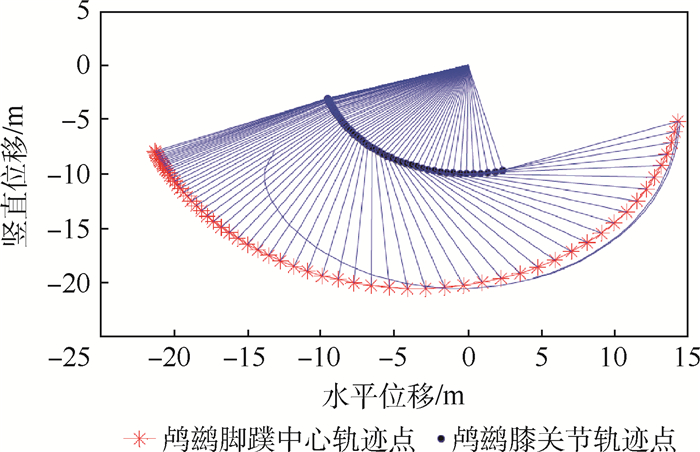
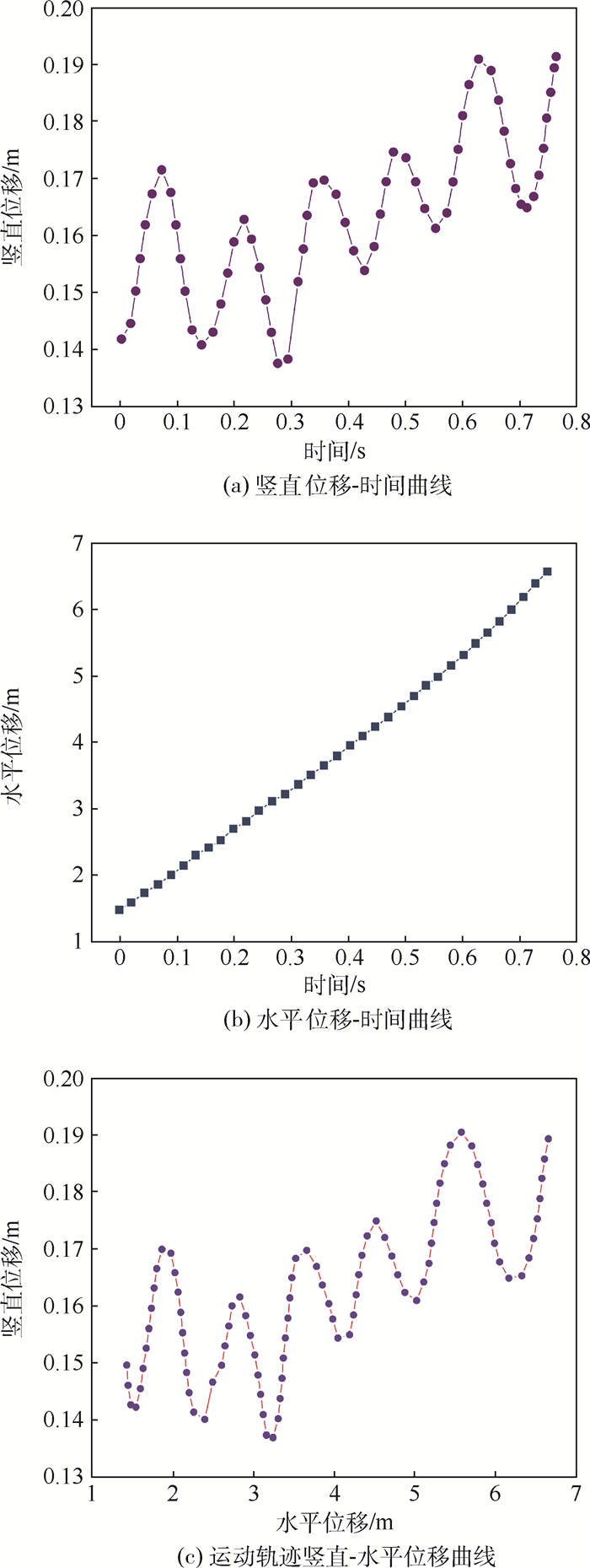
The process of taking off from the surface of water for cormorant is a combination of flapping its wings and its webbed-feet periodically. In order to look into the contribution of the latter that helps in taking off and to compute each period in fixed quantity of the amount of force in each flapping action, this article explores the contribution of hind limb power to the process of taking off as well as the reasons of the need of leg strength for assistance. At the same time, through introducing various types of water walking living creatures and looking at the differences and similarities in the ways that nature creatures walk or run on the water surface, the continuous flapping mechanism of cormorant and other aquatic birds on water surface is studied. Moreover, by comparing the different modes and mechanism of water movement of basilisk lizard and cormorant, an analogy is made to study the impulse generated by the webbed-feet which sustains the body as well as the changes of webbed-feet beating the water. With the DOF of cormorant's webbed-feet defined, the periodic flapping kinematics model during cormorant taking off is established. The D-H matrix of the leg joint angle and the webbed-feet center coordinates, as well as the Jacobian matrix of the joint angular velocity and the webbed-feet center speed are analyzed. Through the existing video analysis, the reliability of the model is verified, and the basic calculation is made for the movement of the cormorant's webbed-feet and the horizontal and vertical direction.

| [1] |
YANG X, WANG T, LIANG J, et al. Survey on the novel hybrid aquatic-aerial amphibious aircraft:Aquatic unmanned aerial vehicle (AquaUAV)[J].Progress in Aerospace Sciences, 2015, 74:131-151. doi: 10.1016/j.paerosci.2014.12.005
|
| [2] |
PADIAN K, CHIAPPE L M.The origin and early evolution of birds[J].Biological Reviews, 1998, 73(1):1-42. doi: 10.1017/S0006323197005100
|
| [3] |
ALEXANDER R M N.Leg design and jumping technique for humans, other vertebrates and insects[J].Philosophical Transactions of the Royal Society of London B:Biological Sciences, 1995, 347(1321):235-248. doi: 10.1098/rstb.1995.0024
|
| [4] |
EARLS K D.Kinematics and mechanics of ground take-off in the starling Sturnis vulgaris and the quail Coturnix coturnix[J].Journal of Experimental Biology, 2000, 203(4):725-739. http://cn.bing.com/academic/profile?id=11b33a987d8f4a88abbd24623425c7ad&encoded=0&v=paper_preview&mkt=zh-cn
|
| [5] |
PROVINI P, TOBALSKE B W, CRANDELL K E, et al.Transition from leg to wing forces during take-off in birds[J].Journal of Experimental Biology, 2012, 215(23):4115-4124. doi: 10.1242/jeb.074484
|
| [6] |
CHEN M W, SUN M.Wing/body kinematics measurement and force and moment analyses of the takeoff flight of fruitflies[J].Acta Mechanica Sinica, 2014, 30(4):495-506. doi: 10.1007/s10409-014-0059-0
|
| [7] |
NORBERG R Å, NORBERG U M.Take-off, landing, and flight speed during fishing flights of Gavia stellata (Pont.)[J].Ornis Scandinavica, 1971, 2(1):55-67. doi: 10.2307/3676239
|
| [8] |
GOUGH W T, FARINA S C, FISH F E.Aquatic burst locomotion by hydroplaning and paddling in common eiders (Somateria mollissima)[J].Journal of Experimental Biology, 2015, 218(11):1632-1638. doi: 10.1242/jeb.114140
|
| [9] |
XUE X, ZHAO X, HUANG J, et al.Experiments and analysis of cormorants' density, wing loading and webbed feet loading[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO).Piscataway, NJ: IEEE Press, 2016: 83-87. http://ieeexplore.ieee.org/document/7866302/
|
| [10] |
CLIFTON G T, HEDRICK T L, BIEWENER A A.Western and Clark's grebes use novel strategies for running on water[J].Journal of Experimental Biology, 2015, 218(8):1235-1243. doi: 10.1242/jeb.118745
|
| [11] |
GLASHEEN J W, MCMAHON T A.A hydrodynamic model of locomotion in the basilisk lizard[J].Nature, 1996, 380(6572):340-342. doi: 10.1038/380340a0
|
| [12] |
BUSH J W M, HU D L.Walking on water:Biolocomotion at the interface[J].Annual Review of Fluid Mechanics, 2006, 38:339-369. doi: 10.1146/annurev.fluid.38.050304.092157
|
| [13] |
HSIEH S T, LAUDER G V.Running on water:Three-dimensional force generation by basilisk lizards[J].Proceedings of the National Academy of Sciences of the United States of America, 2004, 101(48):16784-16788. doi: 10.1073/pnas.0405736101
|
| [14] |
GLASHEEN J W, MCMAHON T A.Vertical water entry of disks at low Froude numbers[J].Physics of Fluids, 1996, 8(8):2078-2083. doi: 10.1063/1.869010
|
| [15] |
HSIEH S T.Three-dimensional hindlimb kinematics of water running in the plumed basilisk lizard (Basiliscus plumifrons)[J].The Journal of Experimental Biology, 2003, 206(23):4363-4377. doi: 10.1242/jeb.00679
|
| [16] |
FLOYD S, KEEGAN T, PALMISANO J, et al.A novel water running robot inspired by basilisk lizards[C]//2006 IEEE/RSJ International Conference on/Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 2006: 5430-5436. http://ieeexplore.ieee.org/document/4059292/
|
| [17] |
WHITE F M.Fluid mechanics[M].4th ed.New York:McGraw-Hill, 1999.
|
| [18] |
Bunch of cormorants enjoying the lake water[EB/OL].(2016-09-24).https://www.youtube.com/watch?v=ULJKKoO-JNs.
|
| [19] |
鸬鹚活动记录[EB/OL].(2015-12-05).https://www.youtube.com/watch?v=4Rgtf9xH7fs.
Cormorant's activity record[EB/OL].(2015-12-05).https://www.youtube.com/watch?v=4Rgtf9xH7fs(in Chinese).
|
| [20] |
HUANG J, GONG X, WANG Z, et al.The kinematics analysis of webbed feet during cormorants' swimming[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO).Piscataway, NJ: IEEE Press, 2016: 301-306.
|
| [21] |
蔡自兴.机器人学[M].北京:清华大学出版社, 2000.
CAI Z X.Robotics[M].Beijing:Tsinghua University Press, 2000(in Chinese).
|
Figures(11) / Tables(5)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: