| Citation: | WEI Xianghui, TANG Chaoying, WANG Biaoet al. Visual guidance algorithm design for autonomous landing based on two points in space[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 357-365. doi: 10.13700/j.bh.1001-5965.2018.0285(in Chinese)

|
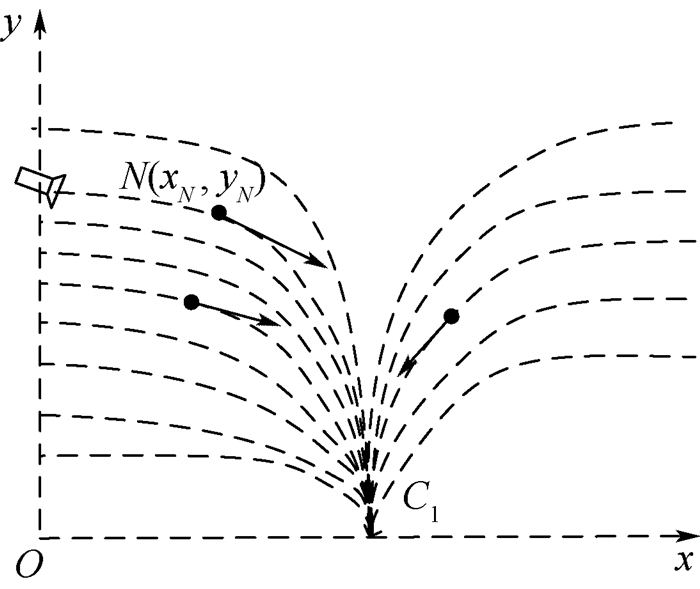
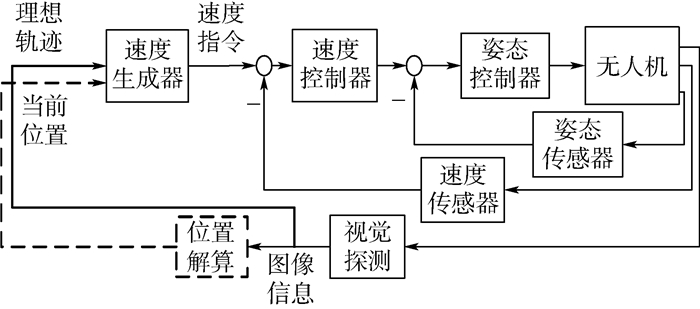
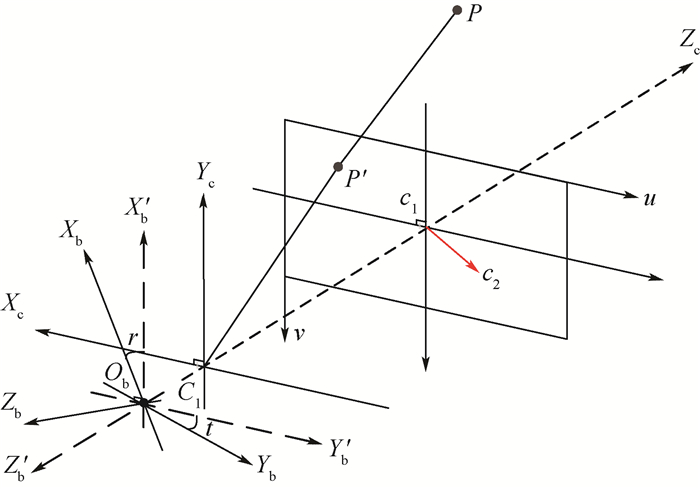
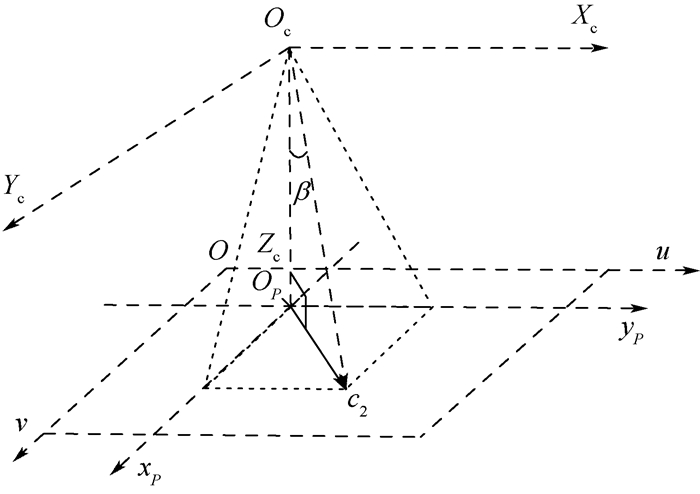
In order to increase the landing efficiency, improvements are made in two aspects:landing velocity vector field and guidance law design. Landing velocity vector field is designed based on ellipse curve for the requirements of shorter flight path and less maneuverability. Meanwhile, the flight path azimuth angle command is generated based on the relationship between the image coordinate system and the body-fixed frame. With reference to the tangential direction of the ellipse, the flight path elevation angle is tuned and combined with the cooperative vector features. Speed command is calculated using image information. Finally, the requirements of the traditional trajectory and the proposed trajectory on the directional maneuverability are compared in theory. The relationship between the trajectory parameters and the UAV turning performance is then shown. The system simulation platform is built based on Simulink, and the required cooperative vector is calculated. The results show that the UAV accurately lands on the target with curved trajectory, which meets the needs in practical applications.

| [1] |
LIN S, GARRATT M A, LAMBERT A J.Monocular vision-based real-time target recognition and tracking for autonomously landing an UAV in a cluttered shipboard environment[J]. Autonomous Robots, 2017, 41(4):881-901. doi: 10.1007/s10514-016-9564-2
|
| [2] |
ARAAR O, AOUF N, VITANOV I.Vision based autonomous landing of multirotor UAV on moving platform[J]. Journal of Intelligent & Robotic Systems, 2017, 85(2):369-384. doi: 10.1007/s10846-016-0399-z
|
| [3] |
SHIRZADEH M, ASL H J, AMIRKHANI A, et al.Vision-based control of a quadrotor utilizing artificial neural networks for tracking of moving targets[J]. Engineering Applications of Artificial Intelligence, 2017, 58:34-48. doi: 10.1016/j.engappai.2016.10.016
|
| [4] |
PRAKASH R O, SARAVANAN C.Autonomous robust helipad detection algorithm using computer vision[C]//International Conference on Electrical, Electronics, and Optimization Techniques.Piscataway, NJ: IEEE Press, 2016: 2599-2604.
|
| [5] |
TANG D, CHEN Y, KOU K.Navigation method based on the solution to PnP problem for autonomous landing of UAV[C]//Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference.Piscataway, NJ: IEEE Press, 2014, 2315-2320.
|
| [6] |
陈茂武.基于视觉的无人机自动着陆导航技术与系统研究[D].南京: 南京航空航天大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10287-1017876045.htm
CHEN M W.Research on vision based automatic landing guidance technology and system for UAVs[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1017876045.htm
|
| [7] |
MINGU K, YOUDAN K.Multiple UAVs nonlinear guidance laws for stationary target observation with waypoint incidence angle constraint[J]. International Journal of Aeronautical and Space Sciences, 2013, 14(1):67-74. doi: 10.5139/IJASS.2013.14.1.67
|
| [8] |
MINGU K, YOUDAN K.Error dynamics-based Lyapunov guidance law for stationary target observation[J]. IFAC Proceedings Volumes, 2011, 44(1):2042-2047. doi: 10.3182/20110828-6-IT-1002.00129
|
| [9] |
MEDEIROS F L L, GOMES V C F, AQUINO M R C D, et al.A computer vision system for guidance of vtol uavs autonomous landing[C]//2015 Brazilian Conference on Intelligent Systems(BRACIS).Piacataway, NJ: IEEE Press, 2015: 333-338.
|
| [10] |
YANG S, SCHERER S A, ZELL A.An onboard monocular vision system for autonomous takeoff, hovering and landing of a micro aerial vehicle[J]. Journal of Intelligent & Robotic Systems, 2013, 69(1-4):499-515. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5df7158da01f5eecad7481fdf8555d08
|
| [11] |
GAUTAM A, SUJIT P B, SARIPALLI S.A survey of autonomous landing techniques for UAVs[C]//International Conference on Unmanned Aircraft Systems.Piscataway, NJ: IEEE Press, 2014: 1210-1218.
|
| [12] |
JUNG W, LIM S, LEE D, et al.Unmanned aircraft vector field path following with arrival angle control[J]. Journal of Intelligent & Robotic Systems, 2016, 84(1-4):311-325. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=c58b520a7d5c09c1266009e2a38a463e
|
| [13] |
MIN B M, TAHK M J, SHIM D H, et al.Guidance law for vision-based automatic landing of UAV[J]. International Journal of Aeronautical and Space Sciences, 2007, 8(1):46-53. doi: 10.5139/IJASS.2007.8.1.046
|
| [14] |
牛轶峰, 凌黎华.无人机规避或跟踪空中目标的自适应运动导引方法[J].国防科技大学学报, 2017, 39(4):116-124. http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201704018
NIU Y F, LING L H.Adaptive motion guidance method of avoiding or tracking aerial targets for unmanned aerial vehicles[J]. Journal of National University of Defense Technology, 2017, 39(4):116-124(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201704018
|
| [15] |
RATNOO A, GHOSE D.Impact angle constrained guidance against nonstationary nonmaneuvering targets[J]. Journal of Guidance, Control, and Dynamics, 2010, 33(1):269-275. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0216024929/
|
| [16] |
LEE H, JUNG S, SHIM D H.Vision-based UAV landing on the moving vehicle[C]//2016 International Conference on Unmanned Aircraft Systems(Icuas).Piscataway, NJ: IEEE Press, 2016: 1-7.
|
| [17] |
CHU H P, MA L, SHAO Z J.Trajectory optimization and online re-planning for vertical takeoff vertical landing on lunar surface[C]//Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference.Piscataway, NJ: IEEE Press, 2016: 2999-3004.
|
| [18] |
张炳亮.基于三维合作目标的视觉探测与导引算法研究[D].南京: 南京航空航天大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10287-1017875076.htm
ZHANG B L.Research on visual detection and guidance algorithm based on 3D cooperative target[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1017875076.htm
|

Figures(13)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: