| Citation: | LI Honggang, Gaohaer·DAWULI, WANG Shuai, et al. An improved car-following model considering effect of pedestrians of adjacent lane on traffic flow[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 422-428. doi: 10.13700/j.bh.1001-5965.2018.0662(in Chinese)

|
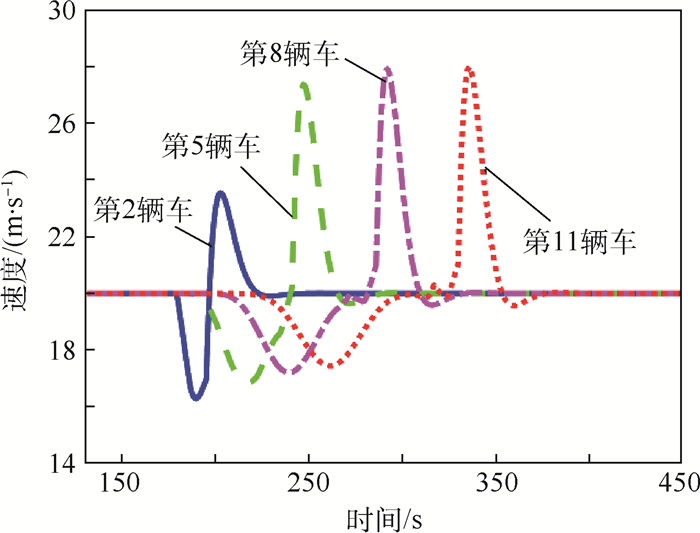
This paper proposes an improved vehicle dynamics model based on the current situation of mixed-pedestrian-vehicle driving in real life. The model considered the influence of pedestrians, bicycles, etc. on the adjacent lanes or in lateral directions on the driving behavior of the main road vehicles. Based on the classical optimal velocity model, this paper modelled the actual problem and introduced the lateral distance and longitudinal distance between the main road vehicle and the pedestrian as parameters into the optimal velocity model, and expanded to obtain the improved model. In order to verify the stability and effectiveness of the model, this paper used the linear stability theory to derive the stability and non-stable conditions of the model, draw a neutral stability curve, and visually describe the size of the traffic flow stability area. It is shown that the improved model considering the lateral pedestrian interference factor is more stable than the traditional car-following model considering only the single-lane vehicle factor, and the steady-state region caused by the change of different parameters also changes. This paper adopted a more realistic optimization of the velocity equation and described the driving behavior of the vehicle through simulation experiments. The simulation experiment lists two kinds of practical scenarios:when pedestrians are scarce and when pedestrians are more. The velocity-time curve of the vehicle and the space(distance)-time curve of the vehicle were plotted separately. The experimental results show that the lateral pedestrians do interfere with the normal driving of the vehicle; in different scenarios, the number of pedestrians will also affect the driving behavior of the vehicle to varying degrees.

| [1] |
NAGATANI T.The physics of traffic jams[J].Reports on Progress in Physics, 2002, 65(9):1331. doi: 10.1088/0034-4885/65/9/203
|
| [2] |
TREIBER M, KESTING A, HELBING D.Delays, inaccuracies and anticipation in microscopic traffic models[J].Physica A:Statistical Mechanics and Its Applications, 2006, 360(1):71-88. doi: 10.1016/j.physa.2005.05.001
|
| [3] |
NGODUY D.Analytical studies on the instabilities of heterogeneous intelligent traffic flow[J].Communications in Nonlinear Science and Numerical Simulation, 2013, 18(10):2699-2706. doi: 10.1016/j.cnsns.2013.02.018
|
| [4] |
REUSCHEL A.Vehicle movements in a platoon with uniform acceleration or deceleration of the lead vehicle[J].Zeitschrift des Oesterreichischen Ingenieur-und Architekten-Vereines, 1950, 95:50-62. http://d.old.wanfangdata.com.cn/Conference/9100805
|
| [5] |
PIPES L A.An operational analysis of traffic dynamics[J].Journal of Applied Physics, 1953, 24(3):274-281. doi: 10.1063/1.1721265
|
| [6] |
CHANDLER R E, HERMAN R, MONTROLL E W.Traffic dynamics:Studies in car following[J].Operations Research, 1958, 6(2):165-184. http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_0805.3400
|
| [7] |
NEWELL G F.Nonlinear effects in the dynamics of car following[J].Operations Research, 1961, 9(2):209-229. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=525133ec45fc2ee28473ad73850d115b
|
| [8] |
BANDO M, HASEBE K, NAKAYAMA A, et al.Dynamical model of traffic congestion and numerical simulation[J].Physical Review E, 1995, 51(2):1035-1045. doi: 10.1103/PhysRevE.51.1035
|
| [9] |
JIANG R, WU Q, ZHU Z.Full velocity difference model for a car-following theory[J].Physical Review E, 2001, 64(1):017101. doi: 10.1103/PhysRevE.64.017101
|
| [10] |
HELBING D, TILCH B.Generalized force model of traffic dynamics[J].Physical Review E, 1998, 58(1):133-138. doi: 10.1103/PhysRevE.58.133
|
| [11] |
ZHOU J.An extended visual angle model for car-following theory[J].Nonlinear Dynamics, 2015, 81(1):549-560. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cc496de659fcad2e8e9d9f5c27b67cce
|
| [12] |
YU S, SHI Z.An improved car-following model considering relative velocity fluctuation[J].Communications in Nonlinear Science and Numerical Simulation, 2016, 36:319-326. doi: 10.1016/j.cnsns.2015.11.011
|
| [13] |
HELBING D, JIANG R, TREIBER M.Analytical investigation of oscillations in intersecting flows of pedestrian and vehicle traffic[J].Physical Review E, 2005, 72(4):046130. doi: 10.1103/PhysRevE.72.046130
|
| [14] |
CHEN P, WU C, ZHU S.Interaction between vehicles and pedestrians at uncontrolled mid-block crosswalks[J].Safety Science, 2016, 82:68-76. doi: 10.1016/j.ssci.2015.09.016
|
| [15] |
ZHANG X, CHANG G.A dynamic evacuation model for pedestrian-vehicle mixed-flow networks[J].Transportation Research Part C:Emerging Technologies, 2014, 40:75-92. doi: 10.1016/j.trc.2014.01.003
|
| [16] |
ITO H, NISHINARI K.Totally asymmetric simple exclusion process with a time-dependent boundary:Interaction between vehicles and pedestrians at intersections[J].Physical Review E, 2014, 89(4):042813. doi: 10.1103/PhysRevE.89.042813
|
| [17] |
JIANG R, WU Q.The moving behavior of a large object in the crowds in a narrow channel[J].Physica A:Statistical Mechanics and Its Applications, 2006, 364:457-463. doi: 10.1016/j.physa.2005.08.060
|
| [18] |
JIANG R, WU Q.Interaction between vehicle and pedestrians in a narrow channel[J].Physica A:Statistical Mechanics and Its Applications, 2006, 368(1):239-246. doi: 10.1016/j.physa.2005.12.071
|
| [19] |
WHITHAM G B.Exact solutions for a discrete system arising in traffic flow[C]//Proceedings of the Royal Society of London.Series A, Mathematical and Physical Sciences.London: The Royal Society of London, Mathematical, Physical and Engineering Sciences, 1990: 49-69.
|
| [20] |
GE H X, DAI S Q, DONG L Y, et al.Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application[J].Physical Review E, 2004, 70(6):066134. doi: 10.1103/PhysRevE.70.066134
|
| [21] |
SAWADA S.Generalized optimal velocity model for traffic flow[J].International Journal of Modern Physics C, 2002, 13(1):1-13. doi: 10.1142/S0129183102002894
|
| [22] |
LI Y, ZHANG L, ZHENG H, et al.Evaluating the energy consumption of electric vehicles based on car-following model under non-lane discipline[J].Nonlinear Dynamics, 2015, 82(1):629-641. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7e0e18c866cda534db079396ed2e94f3
|
| [23] |
PENG G H, SUN D H.A dynamical model of car-following with the consideration of the multiple information of preceding cars[J].Physics Letters A, 2010, 374:1694-1698. doi: 10.1016/j.physleta.2010.02.020
|
| [24] |
TANG T, HUANG H, GAO Z.Stability of the car-following model on two lanes[J].Physical Review E, 2005, 72(6):066124. doi: 10.1103/PhysRevE.72.066124
|
| [25] |
LI Z P, LIU Y C.Analysis of stability and density waves of traffic flow model in an its environment[J].The European Physical Journal B:Condensed Matter and Complex Systems, 2006, 53(3):367-374. doi: 10.1140/epjb/e2006-00382-7
|
| [26] |
YU X.Analysis of the stability and density waves for traffic flow[J].Chinese Physics, 2002, 11(11):1128-1134. doi: 10.1088/1009-1963/11/11/307
|
| [27] |
KONISHI K, KOKAME H, HIRATA K.Coupled map car-following model and its delayed-feedback control[J].Physical Review E, 1999, 60(4):4000-4007. doi: 10.1103/PhysRevE.60.4000
|
| [28] |
BANDO M, HASEBE K, NAKANISHI K, et al.Analysis of optimal velocity model with explicit delay[J].Physical Review E, 1998, 58(5):5429-5450. doi: 10.1103/PhysRevE.58.5429
|
| [29] |
BANDO M, HASEBE K, NAKANISHI K, et al.Phenomenological study of dynamical model of traffic flow[J].Journal de Physique I, 1995, 5(11):1389-1399. doi: 10.1051/jp1:1995206
|
| [30] |
TADAKI S, KIKUCHI M, SUGIYAMA Y, et al.Coupled map traffic flow simulator based on optimal velocity functions[J].Journal of the Physical Society of Japan, 1998, 67(7):2270-2276. doi: 10.1143/JPSJ.67.2270
|

Figures(7) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: