| Citation: | OU Nengjie, WANG Shengli, ZHANG Zhiet al. IMM mixing estimation method based on unequal dimension states[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(10): 2115-2122. doi: 10.13700/j.bh.1001-5965.2019.0038(in Chinese)

|
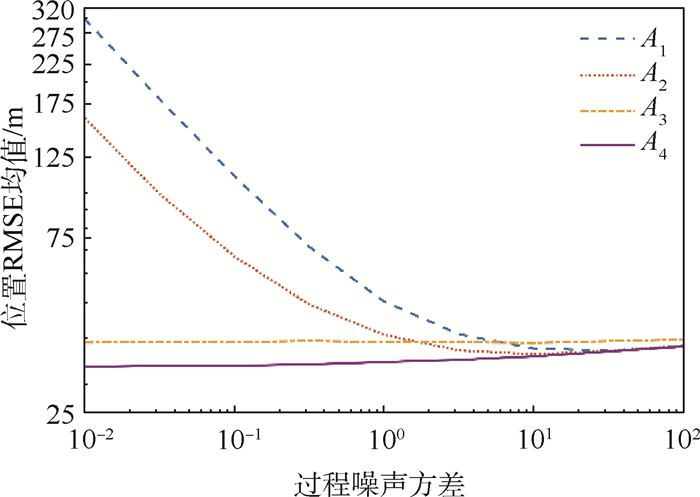
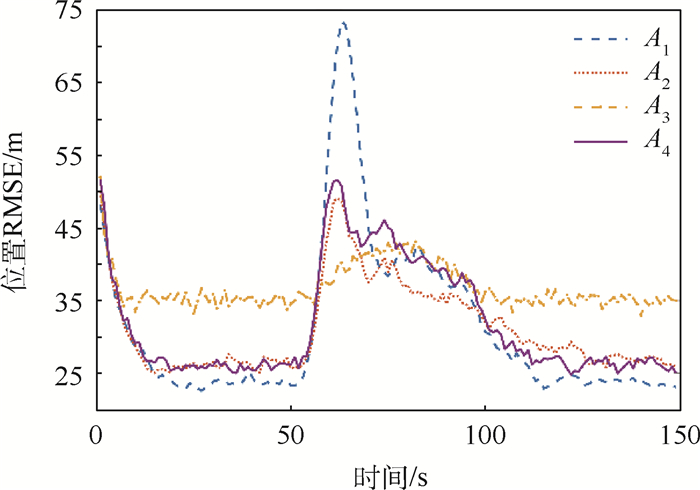
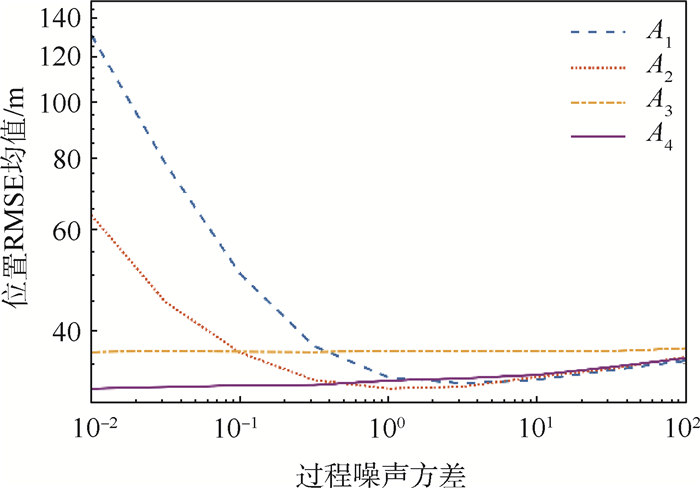
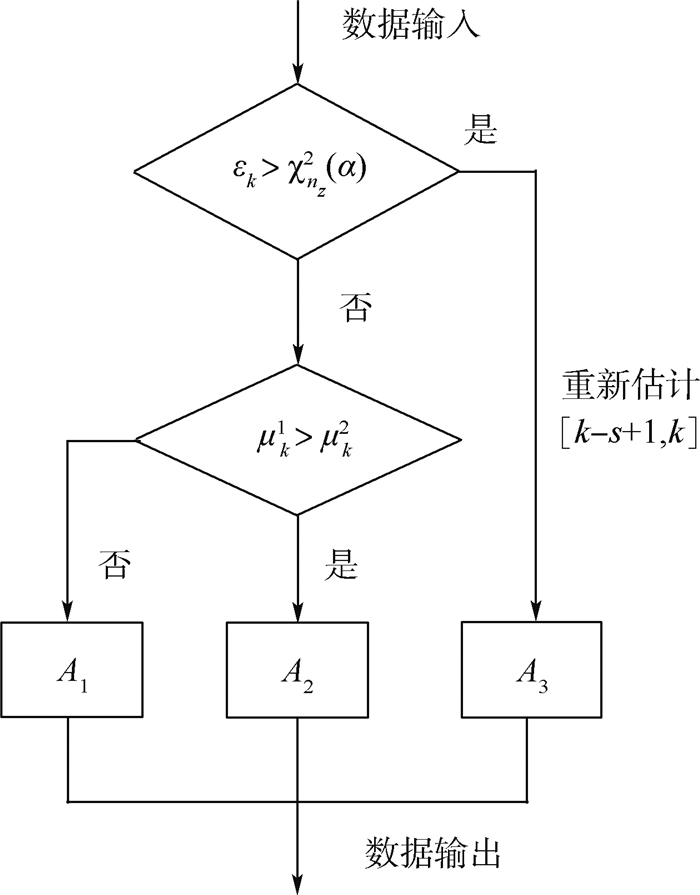
The interacting multiple model (IMM) estimator has been proven to be of excellent performance and low complexity in tracking agile targets. The success of IMM attributes to mode mixing, where model outputs are mixed for model-conditional reinitialization. The problem of unequal dimension states mixing in IMM estimation is studied and an optimal method for IMM mixing is proposed based on summarizing the existing methods. By introducing the concept of "switching" state into the target state, the new method dynamically adjusts the hybrid strategy with model probability and innovation to achieve optimal estimation. The simulation results show that the proposed approach outperforms the existing algorithms in the scenarios of mixing different models.
| [1] |
LI X R, JILKOV V P.Survey of maneuvering target tracking.Part V.Multiple-model methods[J].IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4):1255-1321. doi: 10.1109/TAES.2005.1561886
|
| [2] |
MAZOR E, AVERBUCH A, BAR-SHALOM Y, et al.Interacting multiple model methods in target tracking:A survey[J].IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(1):103-123. doi: 10.1109/7.640267
|
| [3] |
FOO P H, NG G W.Combining the interacting multiple model method with particle filters for manoeuvring target tracking[J].IET Radar, Sonar & Navigation, 2011, 5(3):234-255.
|
| [4] |
翟岱亮, 雷虎民, 李炯, 等.基于自适应IMM的高超声速飞行器轨迹预测[J].航空学报, 2016, 37(11):3466-3475.
ZHAI D L, LEI H M, LI J, et al.Trajectory prediction of hypersonic vehicle based on adaptive IMM[J].Acta Aeronautica et Astronautica Sinica, 2016, 37(11):3466-3475(in Chinese).
|
| [5] |
LI X R.Multiple-model estimation with variable structure.II.Model-set adaptation[J].IEEE Transactions on Automatic Control, 2000, 45(11):2047-2060. doi: 10.1109/9.887626
|
| [6] |
JAFFER A G, GUPTA S C.On estimation of discrete processes under multiplicative and additive noise conditions[J].Information Sciences, 1971, 3(3):267-276. doi: 10.1016/S0020-0255(71)80010-5
|
| [7] |
BLOM H A P, BAR-SHALOM Y.The interacting multiple model algorithm for systems with Markovian switching coefficients[J].IEEE Transactions on Automatic Control, 1988, 33(8):780-783. doi: 10.1109/9.1299
|
| [8] |
LI X R, BAR-SHALOM Y.Multiple-model estimation with variable structure[J].IEEE Transactions on Automatic Control, 1996, 41(4):478-493. doi: 10.1109/9.489270
|
| [9] |
LAN J, LI X R.Equivalent-model augmentation for variable-structure multiple-model estimation[J].IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(4):2615-2630. doi: 10.1109/TAES.2013.6621840
|
| [10] |
XU L, LI X R, DUAN Z.Hybrid grid multiple-model estimation with application to maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(1):122-136. doi: 10.1109/TAES.2015.140423
|
| [11] |
BAR-SHALOM Y, WILLETT P K, TIAN X.Tracking and data fusion[M].Storrs:YBS Publishing, 2011.
|
| [12] |
YUAN T, BAR-SHALOM Y, WILLETT P, et al.A multiple IMM estimation approach with unbiased mixing for thrusting projectiles[J].IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4):3250-3267. doi: 10.1109/TAES.2012.6324701
|
| [13] |
GRANSTRÖM K, WILLETT P, BAR-SHALOM Y.Systematic approach to IMM mixing for unequal dimension states[J].IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4):2975-2986. doi: 10.1109/TAES.2015.150015
|
| [14] |
LOPEZ R, DANÈS P, ROYER F.Extending the IMM filter to heterogeneous-order state space models[C]//49th IEEE Conference on Decision and Control (CDC).Piscataway, NJ: IEEE Press, 2010: 7369-7374.
|
| [15] |
BAR-SHALOM Y, BIRMIWAL K.Variable dimension filter for maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems, 1982, 27(5):621-629. doi: 10.1109-TAES.1982.309274/
|
| [16] |
JIN B, JIU B, SU T, et al.Switched Kalman filter-interacting multiple model algorithm based on optimal autoregressive model for manoeuvring target tracking[J].IET Radar, Sonar & Navigation, 2014, 9(2):199-209.
|
| [17] |
LI X R, JILKOV V P.Survey of maneuvering target tracking.Part IV: Decision-based methods[C]//SPIE Proceedings Series.Society of Photo-Optical Instrumentation Engineers.Piscataway, NJ: IEEE Press, 2002: 511-534.
|
| [18] |
LOPEZ R, DANES P.Low-complexity IMM smoothing for jump Markov nonlinear systems[J].IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3):1261-1272. doi: 10.1109/TAES.2017.2669698
|
| [19] |
KALMAN R E.A new approach to linear filtering and prediction problems[J].Journal of basic Engineering, 1960, 82(1):35-45. doi: 10.1115/1.3662552
|
| 1. | 张成龙,索继东,麻智雄. 基于非等维状态交互的并行IMM转移概率自适应算法. 现代电子技术. 2022(05): 14-18 .  |

Figures(10)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

FU Jinbin, SUN Jinping, LU Songtao, et al. Maneuvering target tracking with modified unbiased FIR filter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1): 77-82. doi: 10.13700/j.bh.1001-5965.2014.0068(in Chinese)




 DownLoad:
DownLoad: