| Citation: | WEI Chunling, YUAN Quan, ZHANG Jun, et al. Integrated orbit, attitude and manipulator control of space multi-body system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 252-258. doi: 10.13700/j.bh.1001-5965.2019.0204(in Chinese)

|
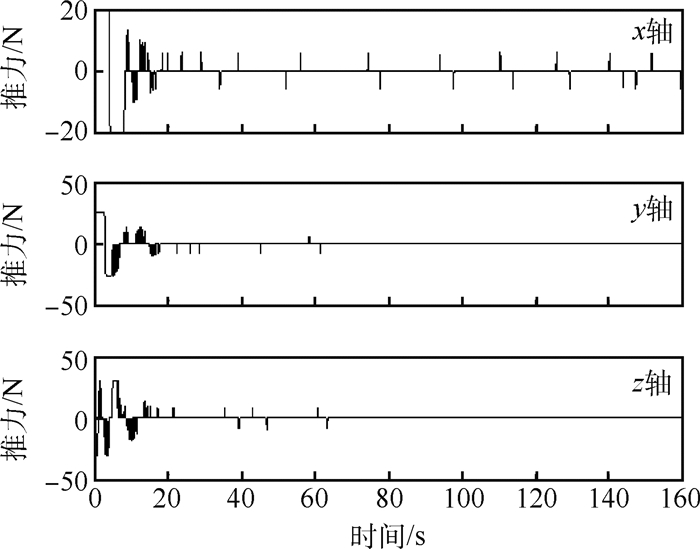
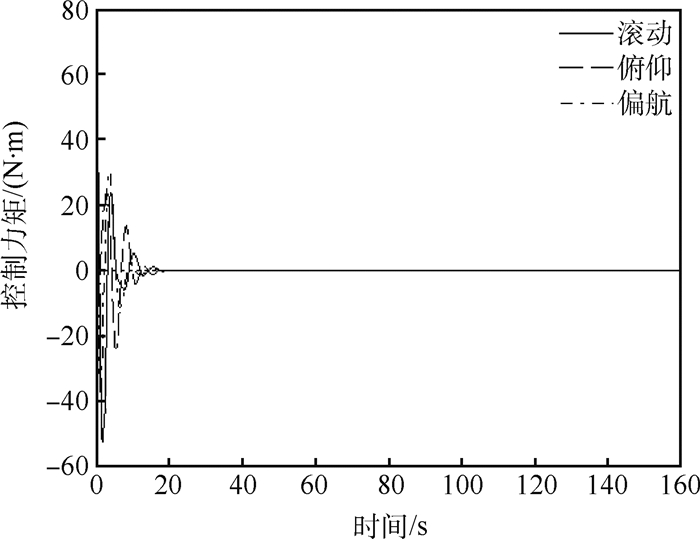
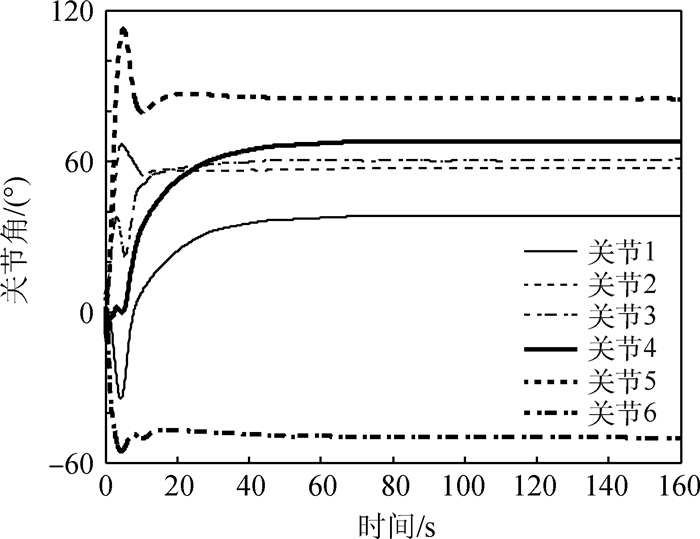
The rapid maneuver ability is widely required for spacecraft aiming the on-orbit servicing tasks. The integrated orbit, attitude and manipulator control was designed for the space multi-body system, which is composed of the satellite base and manipulator. First, the dynamic model of the multi-body system was established. Then, the integrated orbit, attitude and manipulator controller was designed via back stepping method, and the stability of the system was proved. Since all the degrees of freedom are controlled, the abilities of the system to fulfill different tasks are markedly improved, compared to the traditional system whose orbit or attitude is free. Thus, the system with the integrated controller can fulfill simultaneous orbit transfer and attitude maneuver in a large range of space, and meanwhile the manipulator can operate and control accurately. Finally, by establishing complete multi-body system simulation model, the controller was simulated, and the goal of simultaneous orbit, attitude and manipulator control is achieved. The effectiveness of the proposed method is validated.

| [1] |
ODA M.On the dynamics and control of ETS-7 satellite and its robot arm[C]//Proceedings of the IEEE/RSJ/GI International Conference on Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 1994, 3: 1586-1593.
|
| [2] |
BARNHART D A, HUNTER R C, WESTON A R, et al.XSS-10 micro-satellite demonstration: AIAA-98-5298[R].Reston: AIAA, 1998.
|
| [3] |
闻新, 王秀丽, 邓宝忠.美国试验小卫星XSS-11系统[J].中国航天, 2006(7):22-25.
WEN X, WANG X L, DENG B Z.The US XSS-11 small satellite[J].Aerospace China, 2006(7):22-25(in Chinese).
|
| [4] |
STAMM S, MOTAGHEDI P.Orbital express capture system: Concept to reality[C]//Conference on Spacecraft Platforms and Infrastructure.Bellingham: SPIE, 2004, 5419: 78-91.
|
| [5] |
HU J C, WANG T S.Minimum base attitude disturbance planning for a space robot during target capture[J].Journal of Mechanisms and Robotics, 2018, 10(5):1-13.
|
| [6] |
NAKAMURA Y, MUKHERJEE R.Nonholonomic path planning of space robots via a bidirectional approach[J].IEEE Transactions on Robotics and Automation, 1991, 7(4):500-514. doi: 10.1109/70.86080
|
| [7] |
XU Y S, SHUM H Y.Adaptive control of space robot system with attitude controlled base[C]//Proceeding of the IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 1992: 2005-2010.
|
| [8] |
PAPADOPOULOS E, DUBOWSKY S.Dynamic singularities in free-floating space manipulators[J].Journal of Dynamics System, Measurement, and Control, 1993, 115(1):44-52. doi: 10.1115/1.2897406
|
| [9] |
ZHANG F H, FU Y L, WANG S G.An adaptive variable structure control of the robot satellite system with floating base in Cartesian space[J].Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2016, 230(18):3241-3252. doi: 10.1177/0954406215610789
|
| [10] |
张军, 胡海霞, 邢琰.空间机器人退步控制器设计[J].空间控制技术与应用, 2009, 35(1):7-12.
ZHANG J, HU H X, XING Y.Backstepping controller design for space robot[J].Aerospace Control and Application, 2009, 35(1):7-12(in Chinese).
|
| [11] |
TITUS N A.Efficient base control for spacecraft-mounted manipulators: AIAA-2005-6242[R].Reston: AIAA, 2005.
|
| [12] |
UMETANI Y, YOSHIDA K.Resolved motion rate control of space manipulators with generalized Jacobian matrix[J].IEEE Transactions on Robotics and Automation, 1989, 5(3):303-314. doi: 10.1109/70.34766
|
| [13] |
YIME E, SALTAREN R, GARCIA C, et al.Robot based on task-space dynamical model[J].IET Control Theory & Applications, 2011, 5(18):2111-2119.
|
| [14] |
HALL C D, TSIOTRAS P, SHEN H.Tracking rigid body motion using thrusters and momentum wheels[J].Journal of the Astronautical Sciences, 2013, 50(3):311-323.
|
| [15] |
BITTNER H, FISCHER H D, SURAUER M.Design of reaction jet attitude control systems for flexible spacecraft[C]//IFAC Automatical Control in Space, 1982: 373-400.
|

Figures(11) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: