| Citation: | FANG Hairong, LI Zhuangzhuang. Design and analysis of a new large rotation angle 2T2R parallel mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(3): 465-473. doi: 10.13700/j.bh.1001-5965.2019.0217(in Chinese)

|
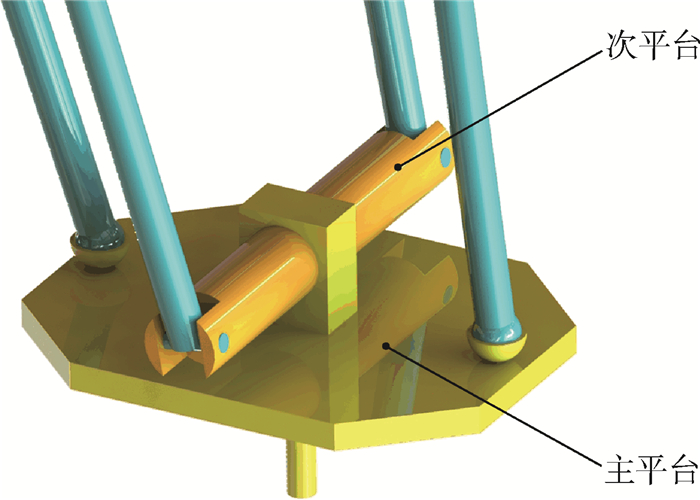
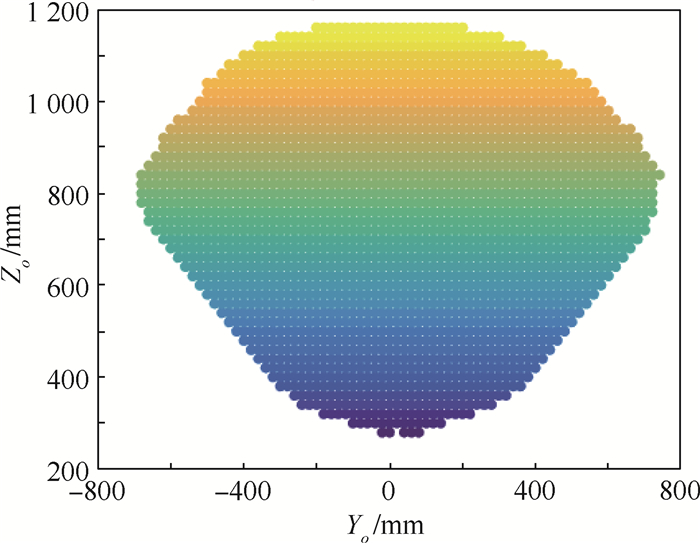
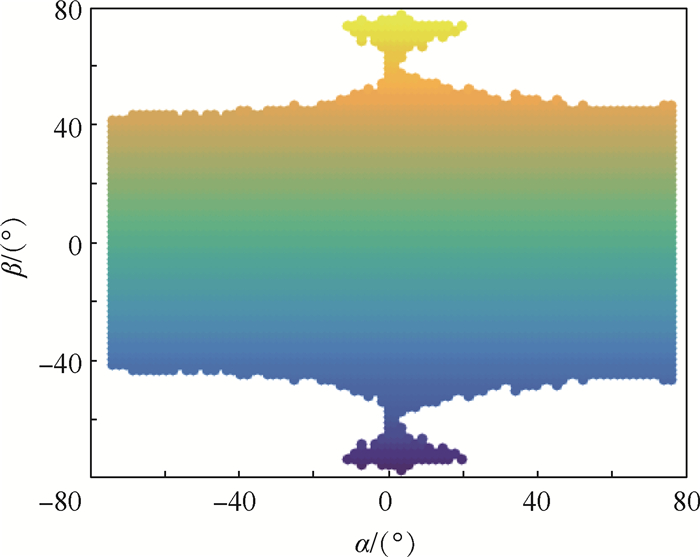
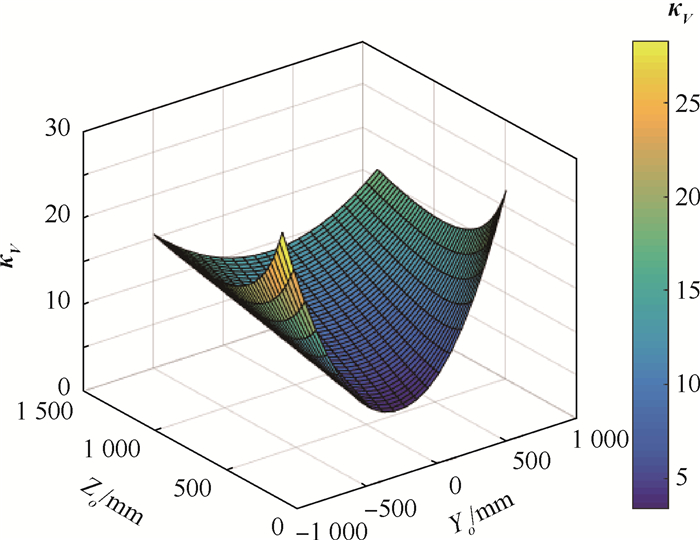
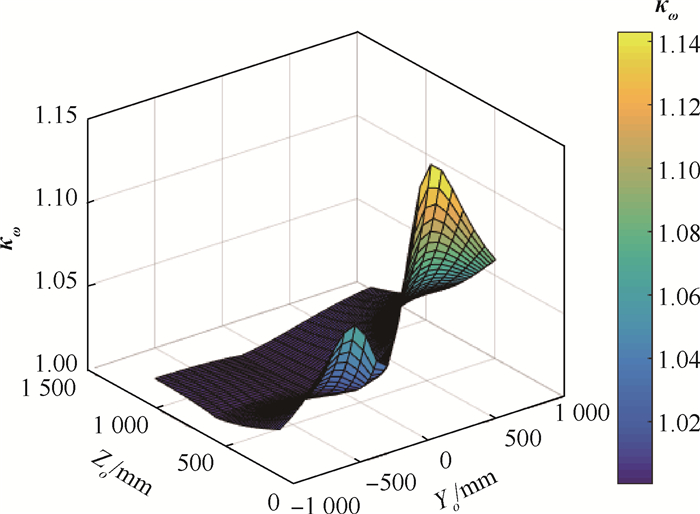
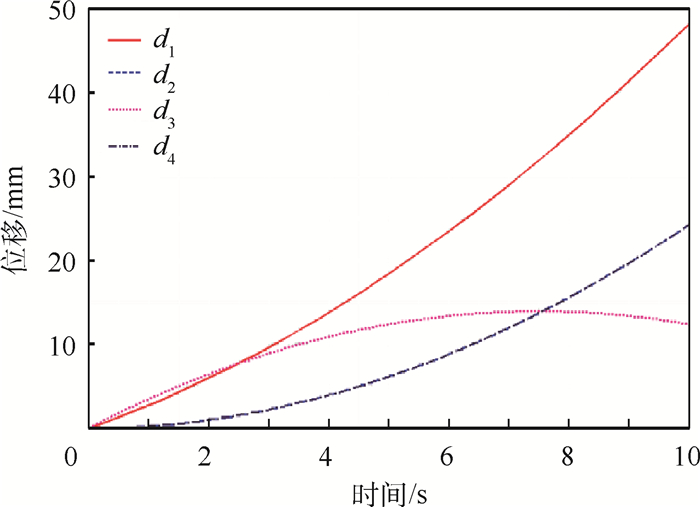
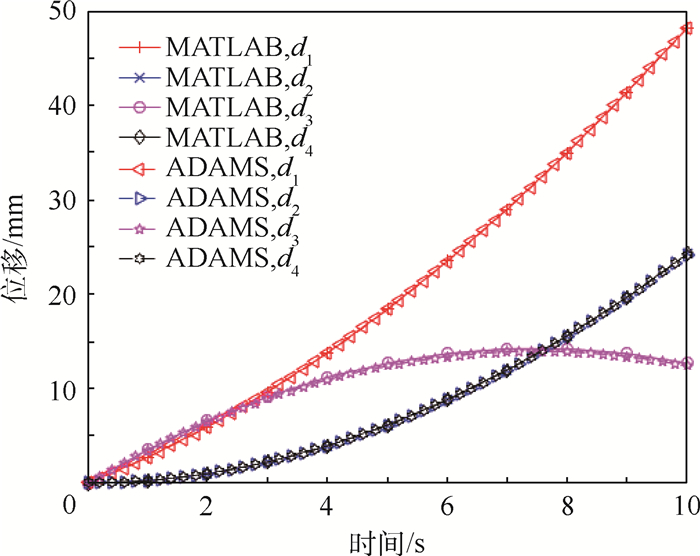
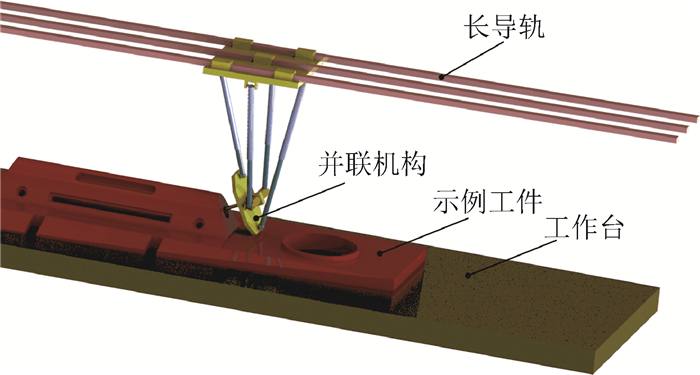
In order to meet the requirements of large and slender structural components, a new type of 5-DOF hybrid robot is proposed, and the new large rotation angle 2T2R parallel mechanism module in the robot is analyzed and studied. Firstly, the degrees of freedom of 2-UPS & (2-RPR)R parallel mechanism are calculated by using the screw theory, and the modified G-K formula is used for verification. Secondly, the closed vector equation is used to analyze the kinematics of the mechanism, the forword kinematics model and inverse kinematics model are established and the Jacobian matrix is calculated. Then, the workspace of the mechanism is plotted with the constraint conditions of the mechanism. Then, the dexterity of the mechanism is analyzed with linear velocity isotropic index and angular velocity isotropic index. Finally, the kinematic simulation is carried out by the given trajectory. Through analysis, the feasibility and practical value of the mechanism are verified, which lays a foundation for the application of the new 5-DOF hybrid robot.

| [1] |
张曙.航空结构件加工的新一代数控机床——解读Ecospeed领悟机床设计之道[J].金属加工(冷加工), 2012(3):2-5. http://www.cnki.com.cn/Article/CJFDTotal-JXGR201203006.htm
ZHANG S.A new generation of numerical control machine tool for processing aviation structural parts-Interpretation of Ecospeed and understanding of the way of machine tool design[J].Metal Working(Metal Cutting), 2012(3):2-5(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-JXGR201203006.htm
|
| [2] |
何宁, 杨吟飞, 李亮, 等.航空结构件加工变形及其控制[J].航空制造技术, 2009(6):32-35. doi: 10.3969/j.issn.1671-833X.2009.06.003
HE N, YANG Y F, LI L, et al.Machining deformation of aircraft structure and its control[J].Aeronautical Manufacturing Technology, 2009(6):32-35(in Chinese). doi: 10.3969/j.issn.1671-833X.2009.06.003
|
| [3] |
杨会, 房海蓉, 李典, 等.一种新型并联灌注机器人运动学分析和多目标优化[J].北京航空航天大学学报, 2018, 44(3):568-575. doi: 10.13700/j.bh.1001-5965.2017.0157
YANG H, FANG H R, LI D, et al.Kinematics analysis and multi-objective optimization of a novel parallel perfusion robot[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):568-575(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0157
|
| [4] |
房海蓉, 王立, 张海强, 等.一种含闭环支链的新型并联机构设计与分析[J].北京航空航天大学学报, 2019, 45(3):454-463. doi: 10.13700/j.bh.1001-5965.2018.0411
FANG H R, WANG L, ZHANG H Q, et al.Design and analysis of a novel parallel mechanism with closed-loop limbs[J].Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(3):454-463(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0411
|
| [5] |
黄玉美, 高峰, 史文浩.混联式数控机床的发展[J].制造技术与机床, 2001(8):8-10. doi: 10.3969/j.issn.1005-2402.2001.08.004
HUANG Y M, GAO F, SHI W H.Development in CNC series-parallel machine tool[J].Manufacturing Technology & Machine Tool, 2001(8):8-10(in Chinese). doi: 10.3969/j.issn.1005-2402.2001.08.004
|
| [6] |
周凯, 陶真, 毛德柱.虚拟轴机床的发展趋势——混联机床[J].现代制造工程, 2002(3):5-7. doi: 10.3969/j.issn.1671-3133.2002.03.001
ZHOU K, TAO Z, MAO D Z.Development trend of virtual axis machine tool-Hybrid machine tool[J].Modern Manufacturing Engineering, 2002(3):5-7(in Chinese). doi: 10.3969/j.issn.1671-3133.2002.03.001
|
| [7] |
SICILIANO B.The Tricept robot:Inverse kinematics, manipulability analysis and closed-loop direct kinematics algorithm[J].Robotica, 1999, 17(4):437-445. doi: 10.1017/S0263574799001678
|
| [8] |
LI M, HUANG T, MEI J, et al.Dynamic formulation and performance comparison of the 3DOF modules of two reconfigurable PKM-The Tricept and the TriVariant[J].Journal of Mechanical Design, 2005, 127(6):1129-1136. doi: 10.1115/1.1992511
|
| [9] |
HOSSEINI M A, DANIALI H R M, TAGHIRAD H D.Dexterous workspace optimization of a Tricept parallel manipulator[J].Advanced Robotics, 2011, 25(13-14):1697-1712. doi: 10.1163/016918611X584640
|
| [10] |
HUANG T, LI M, ZHAO X M, et al.Conceptual design and dimensional synthesis for a 3-DOF module of the TriVariant-A novel 5-DOF reconfigurable hybrid robot[J].IEEE Transactions on Robotics, 2005, 21(3):449-456. doi: 10.1109/TRO.2004.840908
|
| [11] |
DONG C, LIU H, YUE W, et al.Stiffness modeling and analysis of a novel 5-DOF hybrid robot[J].Mechanism and Machine Theory, 2018, 125:80-93. doi: 10.1016/j.mechmachtheory.2017.12.009
|
| [12] |
HUANG T, WANG P F, ZHAO X M, et al.Design of a 4-DOF hybrid PKM module for large structural component assembly[J].CIRP Annals, 2010, 59(1):159-162. doi: 10.1016/j.cirp.2010.03.098
|
| [13] |
汪满新, 王攀峰, 宋轶民, 等.4自由度混联机器人静刚度分析[J].机械工程学报, 2011, 47(15):9-16. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201115002
WANG M X, WANG P F, SONG Y M, et al.Stiffness analysis of a 4-DOF hybrid robot[J].Journal of Mechanical Engineering, 2011, 47(15):9-16(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201115002
|
| [14] |
张蕴芝, 薛强.一种三坐标并联动力头——Sprint Z3的误差建模与灵敏度分析[J].机床与液压, 2011(15):123-125. doi: 10.3969/j.issn.1001-3881.2011.15.036
ZHANG Y Z, XUE Q.Error modeling and sensitivity analysis of a 3-axis parallel machining head-Sprint Z3[J].Machine Tool & Hydraulics, 2011(15):123-125(in Chinese). doi: 10.3969/j.issn.1001-3881.2011.15.036
|
| [15] |
王振宇.齐二自主创新产品XNZ2430型重型龙门混联机床[J].金属加工(冷加工), 2008(18):14. http://d.old.wanfangdata.com.cn/Periodical/jxgr-ljg200818005
WANG Z Y.Introduction of XNZ2430 heavy portal-type hybrid machine tool[J].Metal Working(Metal Cutting), 2008(18):14(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgr-ljg200818005
|
| [16] |
王书森, 梅瑛, 李瑞琴.新型3T2R龙门式混联机床动力学模型[J].机械工程学报, 2016, 52(15):81-90. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201615012
WANG S S, MEI Y, LI R Q.Solving dynamics for a novel 3T2R gantry hybrid machine tool[J].Journal of Mechanical Engineering, 2016, 52(15):81-90(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201615012
|
| [17] |
王俊彦, 苗鸿宾, 倪璟.新型龙门式五轴联动混联机床机构设计及位置逆解研究[J].机械传动, 2017, 41(1):31-35. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxcd201701008
WANG J Y, MIAO H B, NI J.Research of the mechanism design and inverse kinematics of a novel five-axis gantry hybrid machine tool[J].Journal of Mechanical Transmission, 2017, 41(1):31-35(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxcd201701008
|
| [18] |
于靖军.机器人机构学的数学基础[M].北京:机械工业出版社, 2008.
YU J J.The mathematical foundation of robotics[M].Beijing:China Machine Press, 2008(in Chinese).
|
| [19] |
潘英, 方跃法, 汪丛哲.五自由度3D打印并联机器人设计及分析[J].中国机械工程, 2016, 27(17):2273-2279. doi: 10.3969/j.issn.1004-132X.2016.17.001
PAN Y, FANG Y F, WANG C Z.Design and analysis of five DOF 3D printing parallel robot[J].China Mechanical Engineering, 2016, 27(17):2273-2279(in Chinese). doi: 10.3969/j.issn.1004-132X.2016.17.001
|
Figures(11) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: