| Citation: | WANG Baoxing, MENG Gang, LIN Miao, et al. Design and analysis of a 3-PPP compliant parallel micro-positioning stage[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 798-807. doi: 10.13700/j.bh.1001-5965.2019.0286(in Chinese)

|
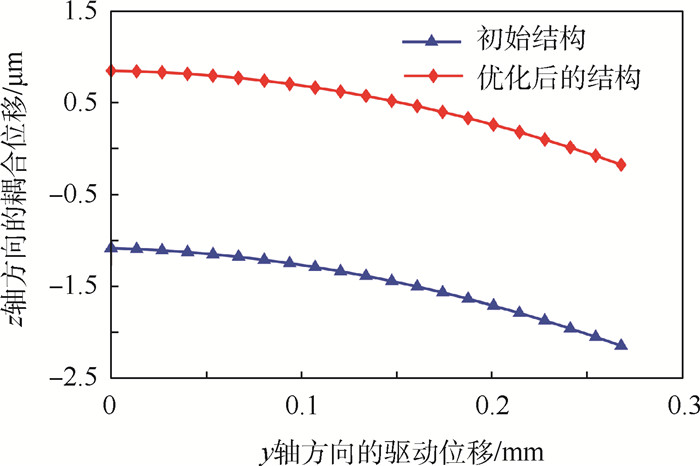
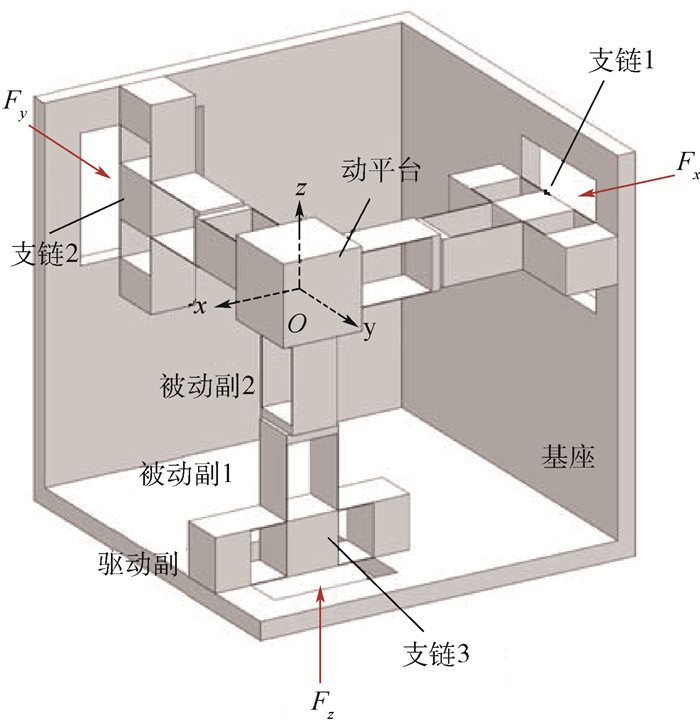
The structure layouts of the existing spatial translational compliant parallel micro-positioning stages are not compact, and the parasitic motion of each kinematic joint accumulates during multi-axis actuation, which leads to the augment of cross-axis coupling error. In order to solve these problems, first, a distributed-compliance 3-PPP spatial translational compliant parallel micro-positioning stage (CPMS) based on compliant sheet was designed. Secondly, the stage volume was reduced, and the parasitic motion accumulation phenomenon of kinematic joints in each limb was eliminated by the way of structure optimization. Then, the theoretical model of input stiffness was deduced through compliance matrix method. The validity of the theoretical model was proved by finite element simulation. Besides, the natural frequency of the CPMS was calculated, and the relationship between natural frequency of the CPMS and size parameters of compliant sheet was explored. Finally, comparative analysis of the CPMS before and after structure optimization was conducted by finite element simulation. The results show that the volume of the CPMS is reduced by 67% after structure optimization, and the CPMS has better kinematic decoupling characteristic and input output consistency in both single-axis and multi-axis actuation.

| [1] |
HOWELL L L.Compliant mechanisms[M].New York:John Wiley and Sons, 2001:2-14.
|
| [2] |
张宪民, 胡凯, 王念峰, 等.基于并行策略的多材料柔顺机构多目标拓扑优化[J].机械工程学报, 2016, 52(19):1-8. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201619001
ZHANG X M, HU K, WANG N F, etal.Multi-objectivetopology optimization of multiple materials compliant mechanisms based on parallel strategy[J].Journal of Mechanical Engineering, 2016, 52(19):1-8(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201619001
|
| [3] |
周睿, 周辉, 桂和利, 等.基于柔性铰链的二自由度微动平台分析及优化[J].北京航空航天大学学报, 2018, 44(9):199-207. doi: 10.13700/j.bh.1001-5965.2017.0706
ZHOU R, ZHOU H, GUI H L, et al.Analysis and optimization of 2-DoF micro-positioning stage based on flexible hinges[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(9):199-207(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0706
|
| [4] |
于靖军, 郝广波, 陈贵敏, 等.柔性机构及其应用研究进展[J].机械工程学报, 2015, 51(13):53-68. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201513006
YU J J, HAO G B, CHEN G M, et al.State-of-art of compliant mechanisms and their applications[J].Journal of Mechanical Engineering, 2015, 51(13):53-68(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201513006
|
| [5] |
PAOLO D G, ALVISE B, PIERLUIGI B.New MEMS tweezers for the viscoelastic characterization of soft materials at the microscale[J].Micromachines, 2018, 9(1):15-37. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=MDPI000000179845
|
| [6] |
DSOUZA R D, NAVIN K P, THEODORIDIS T.Design fabrication and testing of a 2 DOF compliant flexural microgripper[J].Microsystem Technologies, 2018, 24(9):3867-3883. doi: 10.1007/s00542-018-3861-y
|
| [7] |
曹毅, 刘凯, 桂和利, 等.二自由度开口型空间夹持机构研究[J].机械工程学报, 2018, 54(11):94-101. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201811009
CAO Y, LIU K, GUI H L, et al.The research of one two-degree-of-freedom spatial gripper with opening[J].Journal of Mechanical Engineering, 2018, 54(11):94-101(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201811009
|
| [8] |
LIN C, WU Z H, REN Y H, et al.Characteristic analysis of unidirectional multi-driven and large stroke micro/nano-transmission platform[J].Microsystem Technologies, 2017, 23(8):3389-3400. doi: 10.1007/s00542-016-3130-x
|
| [9] |
ÖZKALE B, PARREIRA R, BEKDEMIR A, et al.Modular soft robotic microdevices for dexterous biomanipulation[J].Lab on a Chip, 2019, 19(5):778-788. doi: 10.1039/C8LC01200H
|
| [10] |
LI C, WANG J, CHEN S C.Flexure-based dynamic-tunable five-axis nanopositioner for parallel nanomanufacturing[J].Precision Engineering, 2016, 45:423-434. doi: 10.1016/j.precisioneng.2016.04.002
|
| [11] |
YONG Y K, MOHEIMANI S O R, KENTON B J, et al.Invited review article:High-speed flexure-guided nanopositioning:Mechanical design and control issues[J].Review of Scientific Instruments, 2012, 83(12):121101. doi: 10.1063/1.4765048
|
| [12] |
ZHU Z, TO S, ZHU W L, et al.Optimum design of a piezo-actuated triaxial compliant mechanism for nanocutting[J].IEEE Transactions on Industrial Electronics, 2018, 65(8):6362-6371. doi: 10.1109/TIE.2017.2787592
|
| [13] |
WATANABE S, ANDO T.High-speed XYZ-nanopositioner for scanning ion conductance microscopy[J].Applied Physics Letters, 2017, 111(11):113106. doi: 10.1063/1.4993296
|
| [14] |
HAO G B.Towards the design of monolithic decoupled XYZ compliant parallel mechanisms for multi-function applications[J].Mechanical Sciences, 2013, 4(2):291-302. doi: 10.5194/ms-4-291-2013
|
| [15] |
李海洋, 郝广波, 于靖军, 等.空间平动柔性并联机构的系统设计方法研究[J].机械工程学报, 2018, 54(13):57-65. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201813006
LI H Y, HAO G B, YU J J, et al.Systematic approach to the design of spatial translational compliant parallel mechanisms[J].Journal of Mechanical Engineering, 2018, 54(13):57-65(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb201813006
|
| [16] |
TANG X Y, CHEN I M, LI Q.Design and nonlinear modeling of a large-displacement XYZ flexure parallel mechanism with decoupled kinematic structure[J].Review of Scientific Instruments, 2006, 77(11):115101. doi: 10.1063/1.2364132
|
| [17] |
AWTAR S, USTICK J, SEN S.An XYZ parallel-kinematic flexure mechanism with geometrically decoupled degrees of freedom[J].Journal of Mechanisms and Robotics, 2012, 5(1):015001.
|
| [18] |
LI Y M, XU Q S.Design and optimization of an XYZ parallel micromanipulator with flexure hinges[J].Journal of Intelligent and Robotic Systems, 2009, 55(4-5):377-402. doi: 10.1007/s10846-008-9300-z
|
| [19] |
YUE Y, GAO F, ZHAO X, et al.Relationship among input-force payload stiffness and displacement of a 3-DOF perpendicular parallel micro-manipulator[J].Mechanism and Machine Theory, 2010, 45(5):756-771. doi: 10.1016/j.mechmachtheory.2009.12.006
|
| [20] |
WANG N, ZHANG Z Y, ZHANG X M, et al.Optimization of a 2-DOF micro-positioning stage using corrugated flexure units[J].Mechanism and Machine Theory, 2018, 121:683-696. doi: 10.1016/j.mechmachtheory.2017.11.021
|
| [21] |
CHAO D H, ZONG G H, LIU R.Design of a 6-DOF compliant manipulator based on serial-parallel architecture[C]//2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Piscataway, NJ: IEEE Press, 2005: 765-770.
|
| [22] |
KIM D, GWEON D G, SONG I, et al.Optimal design of a flexure hinge-based XYZ atomic force microscopy scanner for minimizing Abbe errors[J].Review of Scientific Instruments, 2005, 76(7):376-391. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=48cec0eac2a708eaa91eb54e93499f02
|
| [23] |
XU Q S, ZHU X B, DONG Z G, et al.Nonlinear modeling and analysis of compliant mechanisms with circular flexure hinges based on quadrature beam elements[J].Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2019, 233(9):3277-3285. doi: 10.1177/0954406218802945
|
| [24] |
LI Y M, WU Z G.Design analysis and simulation of a novel 3-DOF translational micromanipulator based on the PRB model[J].Mechanism and Machine Theory, 2016, 100:235-258. doi: 10.1016/j.mechmachtheory.2016.02.001
|
| [25] |
SHE Y, MENG D S, SU H J, et al.Introducing mass parameters to pseudo-rigid-body models for precisely predicting dynamics of compliant mechanisms[J].Mechanism and Machine Theory, 2018, 126:273-294. doi: 10.1016/j.mechmachtheory.2018.04.005
|
| [26] |
KOSEKI Y, TANIKAWA T, KOYACHI N, et al.Kinematic analysis of translational 3-DOF micro parallel mechanism using matrix method[J].IEEE/RSJ International Conference on Intelligent Robots and Systems, 2000, 1(3):786-792. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=CC026715134
|
| [27] |
TANG H, LI Y M.Design analysis and test of a novel 2-DOF nanopositioning system driven by dual mode[J].IEEE Transactions on Robotics, 2013, 29(3):650-662. doi: 10.1109/TRO.2013.2248536
|
| [28] |
余跃庆, 张亚涛, 张绪平, 等.柔顺微夹持机构理论分析与实验[J].农业机械学报, 2018, 49(11):393-398. http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201811047
YU Y Q, ZHANG Y T, ZHANG X P, et al.Theoretical analysis and experiment on compliant microgripper mechanism[J].Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(11):393-398(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201811047
|
| [29] |
HAO G B, LI H Y, KEMALCAN S, et al.Understanding coupled factors that affect the modelling accuracy of typical planar compliant mechanisms[J].Frontiers of Mechanical Engineering, 2016, 11(2):129-134. doi: 10.1007/s11465-016-0392-z
|
| [30] |
杨志军, 白有盾, 陈新, 等.基于应力刚化效应的动态特性可调微动平台设计新方法[J].机械工程学报, 2015, 51(23):153-159. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201523019
YANG Z J, BAI Y D, CHEN X, et al.A new design method of dynamic characteristics adjustable micro motion stage based on tension stiffening[J].Journal of Mechanical Engineering, 2015, 51(23):153-159(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201523019
|
| [31] |
XAVIER H, ROSS W, KONG X W.On a simplified nonlinear analytical model for the characterization and design optimization of a compliant XY micro-motion stage[J].Robotics and Computer-Integrated Manufacturing, 2018, 49:66-76. doi: 10.1016/j.rcim.2017.05.012
|
Figures(15) / Tables(5)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: