| Citation: | WEI Tong, LONG Chen. Path planning for mobile robot based on improved genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 703-711. doi: 10.13700/j.bh.1001-5965.2019.0298(in Chinese)

|
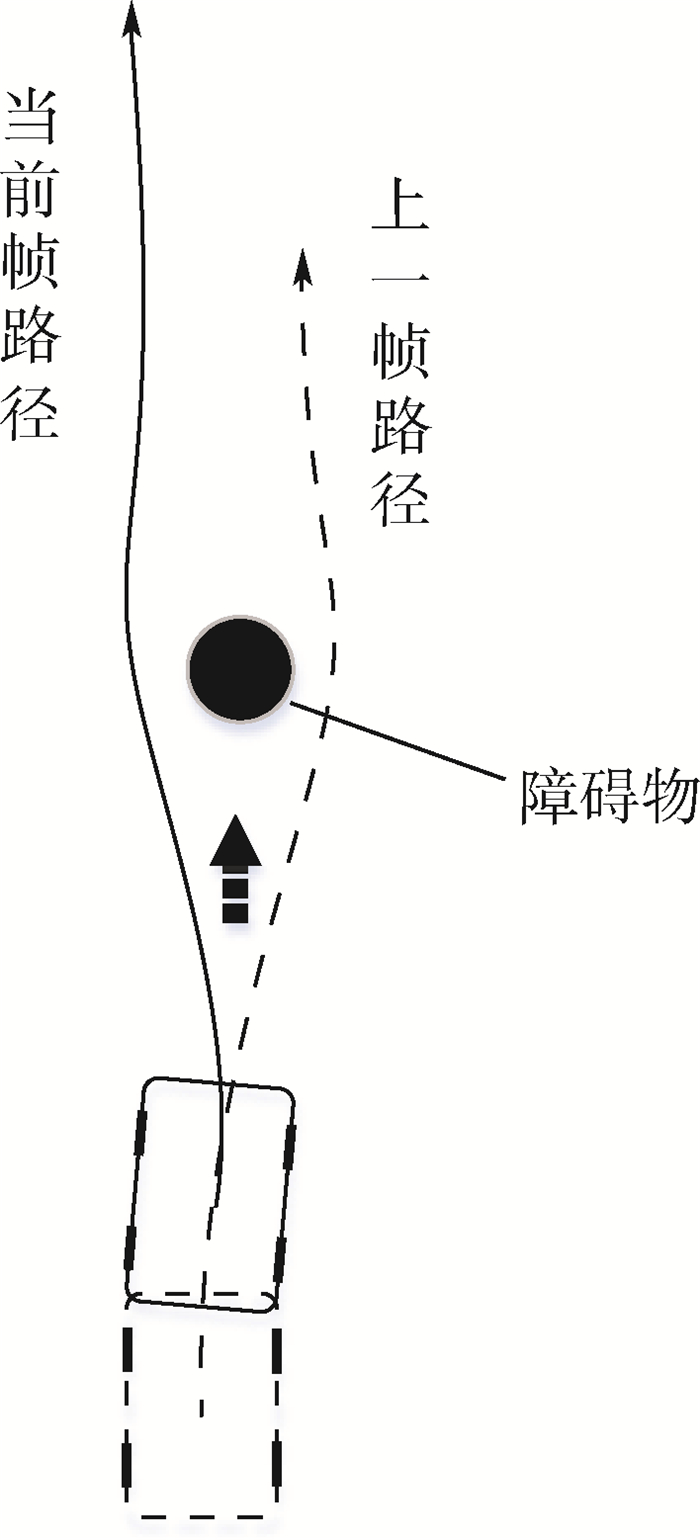
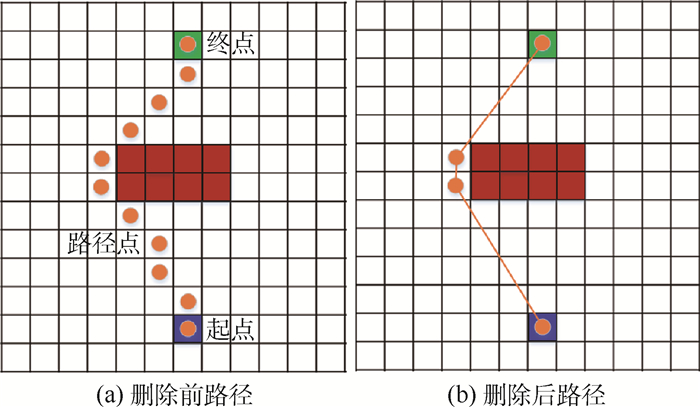
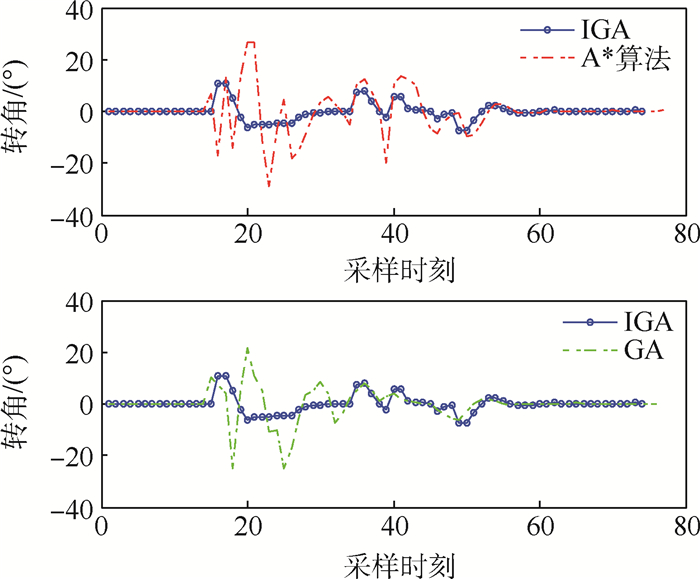
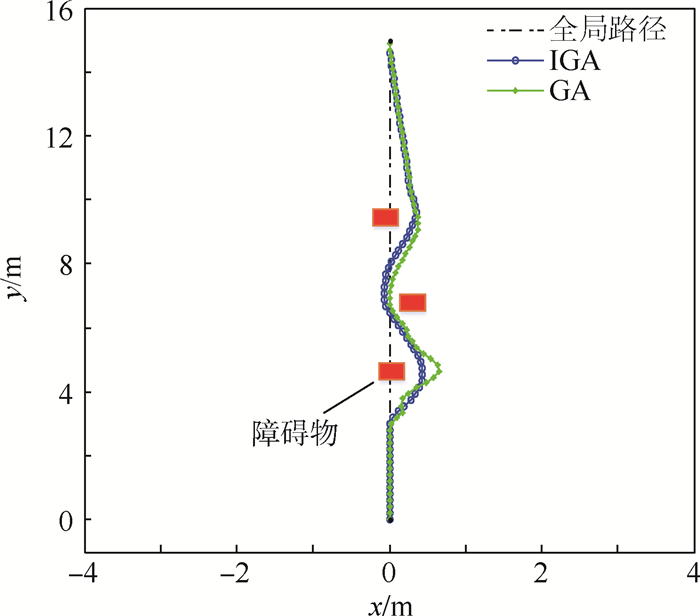
Path planning is the key technology to realize autonomous navigation of mobile robots. For the problem that the path length is not the shortest and the path is not coherent in the two plan cycles with conventional path planning method, a new method for inter-frame correlation smooth path planning based on improved genetic algorithm is proposed. Firstly, the candidate paths were generated by combining random and directional search methods. Then, the insertion operator and deletion operator were added to conventional genetic operators, and the path coherence of two plan cycles was considered in the fitness function to calculate the fitness value of each candidate path. Finally, the path with the highest fitness value was output as the current optimal path. Simulation results show that the proposed method is correct and feasible. Experimental results show that, compared with A* algorithm and conventional genetic algorithm, the path length of mobile robot is reduced by 3.05% and 1.85%, the variation of maximum yaw angle is reduced by 38.02% and 32.43%, and the sum of absolute value of turning angle is reduced by 23.97% and 19.94% respectively during the movement of mobile robot. It shows that the resulting path of this method is more optimal, which observably improves the moving efficiency and stationarity of the mobile robot.

| [1] |
MAC T T, COPOT C, TRAN D T, et al.Heuristic approaches in robot path planning:A survey[J].Robotics and Autonomous Systems, 2016, 86:13-28. https://www.sciencedirect.com/science/article/pii/S0921889015300671
|
| [2] |
赵晓, 王铮, 黄程侃, 等.基于改进A*算法的移动机器人路径规划[J].机器人, 2018, 40(6):137-144. http://d.old.wanfangdata.com.cn/Periodical/dianzixb201105043
ZHAO X, WANG Z, HUANG C K, et al.Mobile robot path planning based on improved A* algorithm[J].Robot, 2018, 40(6):137-144(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/dianzixb201105043
|
| [3] |
周慧子, 胡学敏, 陈龙, 等.面向自动驾驶的动态路径规划避障算法[J].计算机应用, 2017, 37(3):883-888. http://d.old.wanfangdata.com.cn/Periodical/jsjyy201703049
ZHOU H Z, HU X M, CEHN L, et al.Dynamic path planning obstacle avoidance algorithm for autonomous driving[J].Computer Application, 2017, 37(3):883-888(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jsjyy201703049
|
| [4] |
PADEN B, CAP M, YONG S Z, et al.A survey of motion planning and control techniques for self-driving urban vehicles[J].IEEE Transactions on Intelligent Vehicles, 2016, 1(1):33-55. http://cn.bing.com/academic/profile?id=c0bf0b899f4f5a9b0e860a01a2fc3ce2&encoded=0&v=paper_preview&mkt=zh-cn
|
| [5] |
ALIA C, GILLES T, REINE T, et al.Local trajectory planning and tracking of autonomous vehicles, using clothoid tentacles method[C]//IEEE Symposium on Intelligent Vehicles.Piscataway, NJ: IEEE Press, 2015: 674-679.
|
| [6] |
CHU K, LEE M, SUNWOO M.Local path planning for off-road autonomous driving with avoidance of static obstacles[J].IEEE Transactions on Intelligent Transportation Systems, 2012, 13(4):1599-1616. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e9bf32af8035d38a1cee3d6ad1c2632c
|
| [7] |
王景存, 张晓彤, 陈彬, 等.一种基于Dijkstra算法的启发式最优路径搜索算法[J].北京科技大学学报, 2007, 29(3):346-350. http://d.old.wanfangdata.com.cn/Periodical/bjkjdxxb200703022
WANG J C, ZHANG X T, CHEN B, et al.Heuristic optimization path-finding algorithm based on Dijkstra algorithm[J].Journal of University of Science and Technology Beijing, 2007, 29(3):346-350(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/bjkjdxxb200703022
|
| [8] |
WANG Q, HUANG W H, LIU B, et al.An improved A* algorithm for path-planning of two-wheeled self-balancing vehicle[C]//IEEE Conference on Industrial Electronics and Applications(ICIEA).Piscataway, NJ: IEEE Press, 2018: 841-846.
|
| [9] |
辛煜, 梁华为, 杜明博, 等.一种可搜索无限个邻域的改A*算法[J].机器人, 2014, 36(5):627-633. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201405015
XIN Y, LIANG H W, DU M B, et al.An improved A* algorithm for searching infinite neighborhood[J] Robot, 2014, 36(5):627-633(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jqr201405015
|
| [10] |
XU W D, WEI J Q, DOLAN J M, et al.A real-time motion planner with trajectory optimization for autonomous vehicles[C]//IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2012: 2061-2067.
|
| [11] |
GU T Y, SNIDER J, DOLAN J M, et al.Focused trajectory planning for autonomous on-road driving[C]//IEEE Symposium on Intelligent Vehicle.Piscataway, NJ: IEEE Press, 2013: 547-552.
|
| [12] |
LI X H, SUN Z P, LIU D X, et al.Combining local trajectory planning and tracking control for autonomous ground vehicles navigating along a reference path[C]//IEEE International Conference on Intelligent Transportation Systems.Piscataway, NJ: IEEE Press, 2014: 725-731.
|
| [13] |
WU M H, CHEN E K, SHI Q Q, et al.Path planning of mobile robot based on improved genetic algorithm[C]//2017 Chinese Automation Congress(CAC).Piscataway, NJ: IEEE Press, 2017: 6696-6700.
|
| [14] |
GONG Z H, SHAN Y X, DENG Y Q, et al.Balance mechanism design for the fusion of pure pursuit and PI tracking controller[C]//2018 Chinese Automation Congress (CAC).Piscataway, NJ: IEEE Press, 2018: 3149-3152.
|
| [15] |
LIU R, DUAN J.A path tracking algorithm of intelligent vehicle by preview strategy[C]//Proceedings of the 32nd Chinese Control Conference.Piscataway, NJ: IEEE Press, 2013: 5630-5635.
|
| [16] |
LAMINI C, BENHLIMA S, ELBEKRI A.Genetic algorithm based approach for autonomous mobile robot path planning[J].Procedia Computer Science, 2018, 127:180-189. http://cn.bing.com/academic/profile?id=cd3a606abf82a7e767a43c6eb198e7d2&encoded=0&v=paper_preview&mkt=zh-cn
|
| [17] |
LI Q, ZHANG W, YIN Y X, et al.An improved genetic algorithm of optimum path planning for mobile robots[C]//International Conference on Intelligent Systems Design & Applications.Piscataway, NJ: IEEE Press, 2006: 637-642.
|
| [18] |
SU J, LI J.Path planning for mobile robots based on genetic algorithms[C]//Proceedings of 9th International Conference on Natural Computation.Piscataway, NJ: IEEE Press, 2014: 723-727.
|
Figures(15) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: