| Citation: | YAO Xuliang, WANG Xiaowei. Path following and obstacle avoidance control of AUV based on MPC guidance law[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1053-1062. doi: 10.13700/j.bh.1001-5965.2019.0413(in Chinese)

|
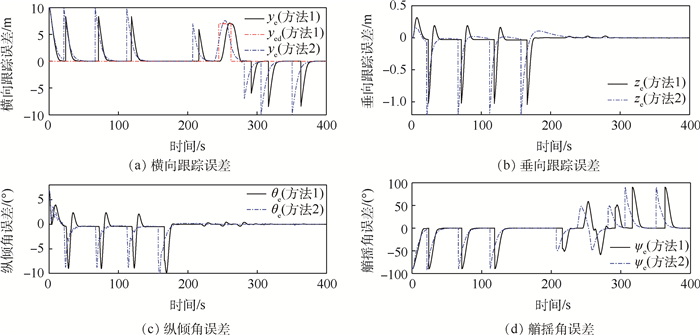
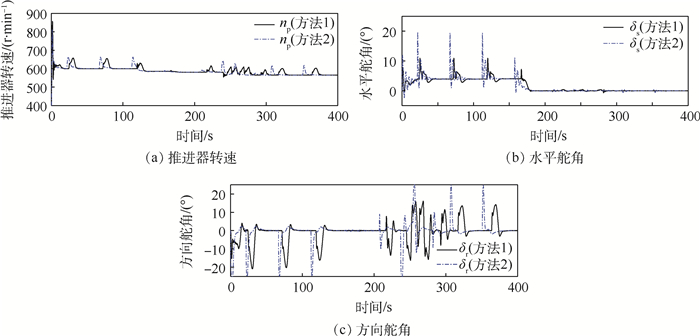
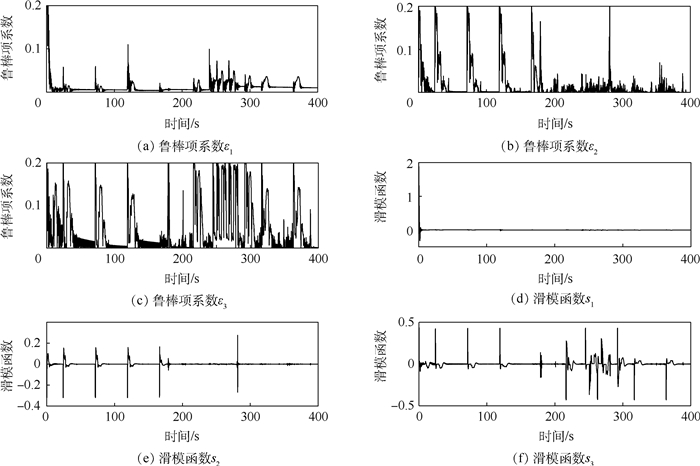
In order to realize the three-dimensional straight path following and obstacle avoidance control of underactuated Autonomous Underwater Vehicle (AUV), a new control method including kinematic and dynamic controller is presented based on cascade control strategy. First, the constraints of pitch and yaw angular velocities are considered in the design of kinematic controller, and the optimal guidance law is designed by using Model Predictive Control (MPC). Then, the rotation speed of thruster and the saturation of rudder angle are considered in the design of dynamic controller, and the dynamic controller is designed based on the Sliding Mode Control (SMC) technology to ensure the robustness of the system. Finally, the performance of the proposed control algorithm is compared with the performance of traditional control method based on Line-Of-Sight (LOS) guidance law by simulation experiment. The simulation results demonstrate that the proposed algorithm can not only improve the three-dimensional straight path tracking effect of underactuated AUV, but also reduce the saturation of rudder angle effectively.

| [1] |
LEKKAS A M, FOSSEN T I.Minimization of cross-track and along-track errors for path tracking of marine underactuated vehicles[C]//2014 European Control Conference(ECC).Piscataway: IEEE Press, 2014: 3004-3010.
|
| [2] |
LEKKAS A M, FOSSEN T I.A time-varying lookahead distance guidance law for path following[J].IFAC Proceedings Volumes, 2012, 45(27):398-403. doi: 10.3182/20120919-3-IT-2046.00068
|
| [3] |
陈霄, 刘忠, 张建强, 等.基于改进积分视线导引策略的欠驱动无人水面艇路径跟踪[J].北京航空航天大学学报, 2018, 44(3):489-499. doi: 10.13700/j.bh.1001-5965.2017.0192
CHEN X, LIU Z, ZHANG J Q, et al.Path following of underactuated USV based on modified integral line-of-sight guidance strategies[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):489-499(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0192
|
| [4] |
XU H, SOARES C G.Vector field path following for surface marine vessel and parameter identification based on LS-SVM[J].Ocean Engineering, 2016, 113:151-161. doi: 10.1016/j.oceaneng.2015.12.037
|
| [5] |
FOSSEN T I, PETTERSEN K Y, GALEAZZI R.Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces[J].IEEE Transactions on Control Systems Technology, 2015, 23(2):820-827. doi: 10.1109/TCST.2014.2338354
|
| [6] |
CAHARIJA W, PETTERSEN K Y, SØRENSEN A J, et al.Relative velocity control and integral line of sight for path following of autonomous surface vessels:Merging intuition with theory[J].Proceedings of the Institution of Mechanical Engineers, Part M:Journal of Engineering for the Maritime Environment, 2014, 228(2):180-191. doi: 10.1177/1475090213512293
|
| [7] |
FOSSEN T I, LEKKAS A M.Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J].International Journal of Adaptive Control and Signal Processing, 2017, 31(4):445-463. doi: 10.1002/acs.2550
|
| [8] |
李娟, 边信黔, 熊华胜, 等.AUV的精确航迹跟踪系统的鲁棒控制[J].哈尔滨工业大学学报, 2013, 45(1):112-117. http://d.old.wanfangdata.com.cn/Periodical/hebgydxxb201301021
LI J, BIAN X Q, XIONG H S, et al.Robust control research for AUV trajectory control system[J].Journal of Harbin Institute of Technology, 2013, 45(1):112-117(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hebgydxxb201301021
|
| [9] |
YAN Z P, YU H M, ZHANG W, et al.Globally finite-time stable tracking control of underactuated UUVs[J].Ocean Engineering, 2015, 107:132-146. doi: 10.1016/j.oceaneng.2015.07.039
|
| [10] |
潘永平, 黄道平, 孙宗海.欠驱动船舶航迹Backstepping自适应模糊控制[J].控制理论与应用, 2011, 28(7):907-914. http://www.cnki.com.cn/Article/CJFDTotal-KZLY201107005.htm
PAN Y P, HUANG D P, SUN Z H.Backstepping adaptive fuzzy control for track-keeping of underactuated surface vessels[J].Control Theory & Applications, 2011, 28(7):907-914(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-KZLY201107005.htm
|
| [11] |
LIU C, ZOU Z J, YIN J C.Trajectory tracking of underactuated surface vessels based on neural network and hierarchical sliding mode[J].Journal of Marine Science and Technology, 2015, 20:322-330. doi: 10.1007/s00773-014-0285-y
|
| [12] |
OH S R, SUN J.Path following of underactuated marine surface vessels using line-of-sight based model predictive control[J].Ocean Engineering, 2010, 37(2-3):289-295. doi: 10.1016/j.oceaneng.2009.10.004
|
| [13] |
YAO X L, YANG G Y, PENG Y.Nonlinear reduced-order observer-based predictive control for diving of an autonomous underwater vehicle[J].Discrete Dynamics in Nature and Society, 2017:4394571. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5c2ca5bd6e2bd055e1bdb696f9e54b40
|
| [14] |
ZHENG Z W, FEROSKHAN M.Path following of a surface vessel with prescribed performance in the presence of input saturation and external disturbances[J].IEEE/ASME Transactions on Mechatronics, 2017, 22(6):2564-2575. doi: 10.1109/TMECH.2017.2756110
|
| [15] |
MOE S, PETTERSEN K Y.Set-based line-of-sight (LOS) path following with collision avoidance for underactuated unmanned surface vessel[C]//IEEE Mediterranean Conference on Control & Automation.Piscataway: IEEE Press, 2016: 402-409.
|
| [16] |
SHIM T, ADIREDDY G, YUAN H L.Autonomous vehicle collision avoidance system using path planning and model-predictive-control-based active front steering and wheel torque control[J].Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2012, 226(D6):767-778. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0231353825/
|
| [17] |
PRESTERO T.Verification of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle[D].Cambridge: Massachusetts Institute of Technology, 2001: 12-112.
|
| [18] |
段斐.微小型水下机器人运动仿真研究[D].哈尔滨: 哈尔滨工程大学, 2012: 11-80.
DUAN F.Research on motion simulation for mini autonomous underwater vehicle[D].Harbin: Harbin Engineering University, 2012: 11-80(in Chinese).
|

Figures(6) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: