| Citation: | GUO Xinping, WANG Chengwen, LIU Hua, et al. Extended-state-observer based sliding mode control for pump-controlled electro-hydraulic servo system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1159-1168. doi: 10.13700/j.bh.1001-5965.2019.0418(in Chinese)

|
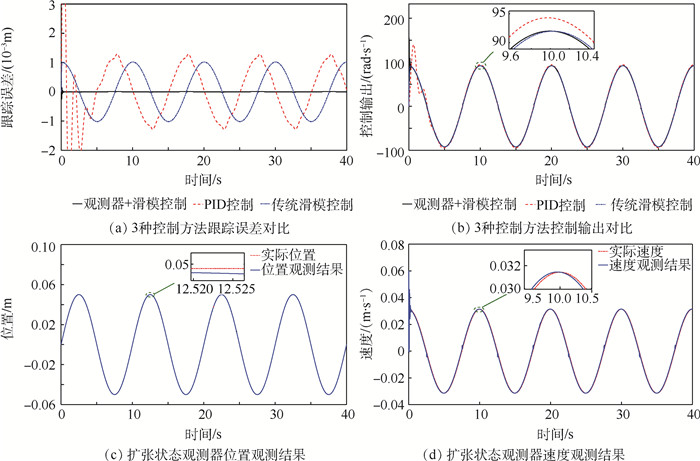
A sliding mode position tracking control strategy based on extended state observer is proposed for pump-controlled electro-hydraulic servo system. The mathematical model of the system is processed by reducing order using singular perturbation theory, and the mathematical model of reduced-order pump-controlled electro-hydraulic position servo system is obtained. Aimed at the complexity of pump-controlled electro-hydraulic servo system and the disturbance of random external load, an extended state observer is designed to estimate the disturbance on-line. Besides providing the estimations of disturbances, the observer can also estimate the position and velocity of piston rod. Based on the sliding mode control theory, a sliding mode variable structure control algorithm is designed using the estimations of disturbance and speed. The stability of the proposed control strategy is analyzed. Co-simulation model of pump-controlled electro-hydraulic servo system was conducted using MATLAB/Simulink and AMESim. The feasibility and effectiveness of the algorithm are verified by co-simulation. The simulation results show that the extended state observer can accurately estimate the disturbance. The position tracking performance of the proposed extended-state-observer based sliding mode control strategy is significantly better than that of PID controller and traditional sliding mode controller, and it has strong robustness to external disturbance, which improves the control performance of the pump-controlled electro-hydraulic servo system.

| [1] |
付永领, 韩旭, 杨荣荣, 等.电动静液作动器设计方法综述[J].北京航空航天大学学报, 2017, 43(10):1939-1952. doi: 10.13700/j.bh.1001-5965.2017.0195
FU Y L, HAN X, YANG R R, et al.Review on design method of electro-hydrostatic actuator[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10):1939-1952(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0195
|
| [2] |
汪成文, 尚耀星, 焦宗夏, 等.阀控电液位置伺服系统非线性鲁棒控制方法[J].北京航空航天大学学报, 2014, 40(12):1736-1740. doi: 10.13700/j.bh.1001-5965.2013.0752
WANG C W, SHANG Y X, JIAO Z X, et al.Nonlinear robust control of valve controlled electro-hydraulic position servo system[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(12):1736-1740(in Chinese). doi: 10.13700/j.bh.1001-5965.2013.0752
|
| [3] |
HABIBI S, GOLDENBERG A.Design of a new high-performance electrohydraulic actuator[J].IEEE/ASME Transactions on Mechatronics, 2000, 5(2):158-164. doi: 10.1109/3516.847089
|
| [4] |
权龙.泵控缸电液技术研究现状、存在问题及创新解决方案[J].机械工程学报, 2008, 44(11):87-92. http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200811015
QUAN L. Current state, problems and the innovative solution of electro-hydraulic technology of pump controlled cylinder[J].Chinese Journal of Mechanical Engineering, 2008, 44(11):87-92(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxgcxb200811015
|
| [5] |
SHEN W, PANG Y, JIANG J H.Robust controller design of the integrated direct drive volume control architecture for steering systems[J].ISA Transactions, 2018, 78:116-129. doi: 10.1016/j.isatra.2017.05.008
|
| [6] |
杨晨.电站调节阀门直驱式电液执行器的仿真和实验研究[D].哈尔滨: 哈尔滨工业大学, 2016: 1-12. http://cdmd.cnki.com.cn/Article/CDMD-10213-1016914440.htm
YANG C.Simulation and experiment research of the direct-drive electro-hydraulic actuator of regulating valves[D].Harbin: Harbin Institute of Technology, 2016: 1-12(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10213-1016914440.htm
|
| [7] |
AHN K K, NAM D N C, JIN M.Adaptive backstepping control of an electrohydraulic actuator[J].IEEE/ASME Transactions on Mechatronics, 2014, 19(3):987-995. doi: 10.1109/TMECH.2013.2265312
|
| [8] |
TRI N M, NAM D N C, PARK H G, et al.Trajectory control of an electro hydraulic actuator using an iterative backstepping control scheme[J].Mechatronics, 2015, 29:96-102. doi: 10.1016/j.mechatronics.2014.10.002
|
| [9] |
ZHANG H, LIU X, WANG J, et al.Robust H∞ sliding mode control with pole placement for a fluid power electrohydraulic actuator (EHA) system[J].The International Journal of Advanced Manufacturing Technology, 2014, 73(5-8):1095-1104. doi: 10.1007/s00170-014-5910-8
|
| [10] |
KOKOTOVIC V, KHALIL H, REILLY J O.Singular perturbation methods in control:Analysis and design[M].New York:Academic Press, 1986.
|
| [11] |
KHALIL H.Nonlinear systems[M].Upper Saddle River:Prentice-Hall, 1996.
|
| [12] |
KIM E S.Nonlinear indirect adaptive control of a quarter car active suspension[C]//Proceeding of the 1996 IEEE International Conference on Control Applications.Piscataway: IEEE Press, 1996: 61-66.
|
| [13] |
WANG L K, BOOK W J, HUGGINS J D.A control approach with application to variable displacement pumps[C]//2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Piscataway: IEEE Press, 2009: 1862-1867. https://www.researchgate.net/publication/224586258_A_control_approach_with_application_to_variable_displacement_pumps
|
| [14] |
WANG L K, BOOK W J, HUGGINS J D.Application of singular perturbation theory to hydraulic pump controlled systems[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(2):251-259. doi: 10.1109/TMECH.2010.2096230
|
| [15] |
HASSAN K K.非线性系统[M].朱义胜, 董辉, 李作洲, 等译.北京:电子工业出版社, 2017:312-317.
HASSAN K K.Nonlinear systems[M].ZHU Y S, DONG H, LI Z Z, et al., translated.Beijing:Electronic Industry Press, 2017:312-317(in Chinese).
|
| [16] |
JEROUANE M, LAMNABHI-LAGARRIGUE F.A new robust sliding mode controller for a hydraulic actuator[C]//Proceedings of the 40th IEEE Conference on Decision and Control.Piscataway: IEEE Press, 2001, 1: 908-913. https://www.researchgate.net/publication/224762808_A_new_robust_sliding_mode_controller_for_a_hydraulic_actuator?_sg=0O_S_t8a9BdfAxE20R_It_PWEZR2TIMyPQlcUHsv1_BZ0PPt4IzgVc-HZw_DgspzQiV5TSmvemB7HYyyocQnEA
|
| [17] |
GUO H, LIU Y G, LIU G R, et al.Cascade control of a hydraulically driven 6-DOF parallel robot manipulator based on a sliding mode[J].Control Engineering Practice, 2008, 16(9):1055-1068. doi: 10.1016/j.conengprac.2007.11.005
|
| [18] |
WANG S, HABIBI S, BURTON R.Sliding mode control for an electrohydraulic actuator system with discontinuous non-linear friction[J].Proceedings of the Institution of Mechanical Engineers, Part I:Joumal of Systems and Control Engineering, 2008, 222(8):799-815. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=293130d629e7f27a638d271a262903b6
|
| [19] |
BESSA W M, DUTRA M S, KREUZER E.Sliding mode control with adaptive fuzzy dead-zone compensation of an electro-hydraulic servo system[J].Journal of Intelligent & Robotic Systems, 2010, 58(1):3-16. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ef3bbb88d4304efcb94c2e2aa123b5e8
|

Figures(6) / Tables(5)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: