| Citation: | ZHANG Qiqian, XU Weiwei, ZHANG Honghai, et al. Path planning for logistics UAV in complex low-altitude airspace[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(7): 1275-1286. doi: 10.13700/j.bh.1001-5965.2019.0455(in Chinese)

|
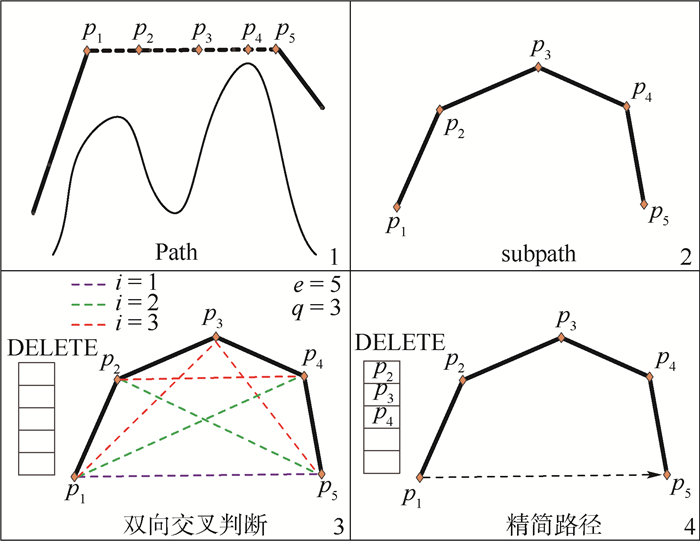
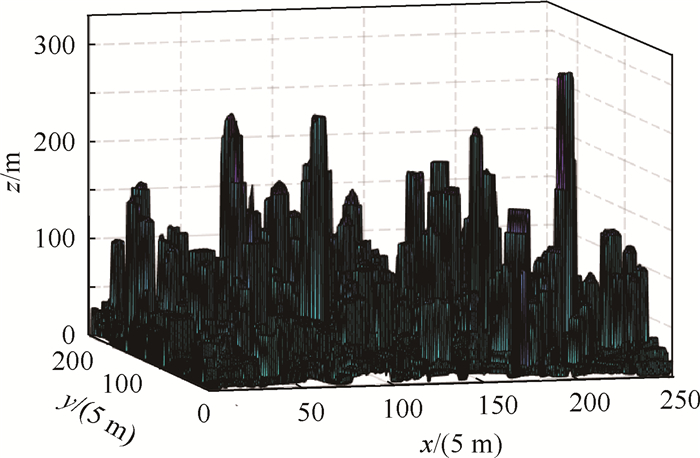
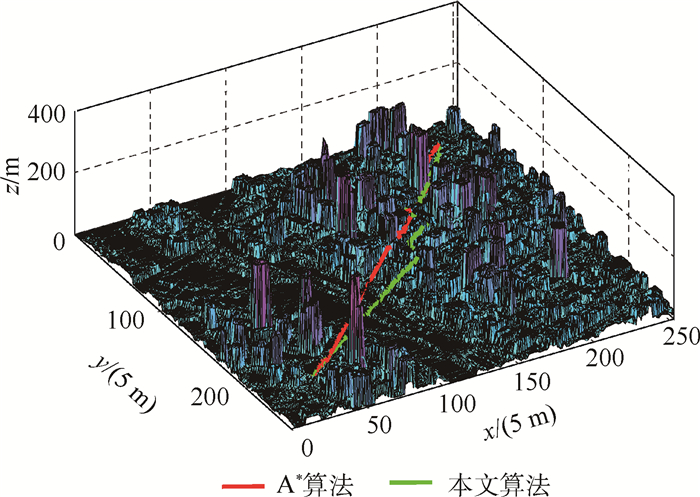
To solve the problem of path planning for logistics UAV in the complex low-altitude airspace, internal and external restrictions such as airspace environment and transportation tasks were considered. Taking minimize flight time, energy consumption and path risk as the objective function, the multi-restricted transportation path planning model of logistics UAV was established. To plan the path quickly, an improved heuristic algorithm was designed. The grid method was used to model the environment. The performance constraints of UAV were introduced to ensure that UAV can follow the path. To solve the existing problems of the original algorithm and indicate the characteristics of logistics UAV air transportation, the concepts of grid risk and cargo weight penalty coefficient were introduced, and flight time and energy consumption were calculated to improve the obstacle avoidance ability and reduce the cost. The dynamic weighting method was used to assign the weight of the function to match the efficiency and accuracy of the algorithm. In order to delete redundant path points and ensure smooth flight, bidirectional cross judgment method was used to optimize and smooth the original path. In order to verify the effectiveness of the model and the algorithm, the results of four algorithms were compared. Meanwhile, the influence of grid length and cost weight on planning results was analyzed. With the constraints of the assumed environment and UAV performance, the study results indicate that, compared with the original algorithm, the proposed algorithm ensures the flight safety of logistics UAV with less energy consumption, and reduces the flight time from 406 s to 386 s, which is reduced by 5%. The number of flight path points is 129 and the grid risk is 11.69, which reduces the number of attitude changes and ensures the safety of transportation. When the grid length is 5 m and the cost weight is 0.4, 0.1 and 0.5, the path planned by the proposed algorithm is optimal.

| [1] |
GOODCHILD A, TOY J.Delivery by drone:An evaluation of unmanned aerial vehicle technology in reducing CO2, emissions in the delivery service industry[J].Transportation Research Part D:Transport and Environment, 2017, 61:58-67. https://depts.washington.edu/sctlctr/research/publications/delivery-drone-evaluation-unmanned-aerial-vehicle-technology-reducing-co2
|
| [2] |
ROBERGE V, TARBOUCHI M, LABONTE G.Fast genetic algorithm path planner for fixed-wing military UAV using GPU[J].IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(5):2105-2117. doi: 10.1109/TAES.2018.2807558
|
| [3] |
WU Z Y, LI J H, ZUO J M, et al.Path planning of UAVs based on collision probability and Kalman filter[J].IEEE Access, 2018, 6:34237-34245. doi: 10.1109/ACCESS.2018.2817648
|
| [4] |
PAPACHRISTOS C, KAMEL M, POPOVIĆ M, et al.Autonomous exploration and inspection path planning for aerial robots using the robot operating system[M]//KOUBAA A.Robot operating system(ROS).Berlin:Springer, 2018, 778:67-111.
|
| [5] |
王宇, 陈海涛, 李煜, 等.基于Grid-GSA算法的植保无人机路径规划方法[J].农业机械学报, 2017, 48(7):29-37. http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201707004
WANG Y, CHEN H T, LI Y, et al.Path planning method based on Grid-GSA for plant protection UAV[J].Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(7):29-37(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/nyjxxb201707004
|
| [6] |
郑翔.无人机物流业发展的法律障碍和立法思考[J].北京交通大学学报(社会科学版), 2018, 17(1):136-142. doi: 10.3969/j.issn.1672-8106.2018.01.017
ZHENG X.The legal obstacles and countermeasures for unmanned aircraft logistics development[J].Journal of Beijing Jiaotong University(Social Sciences Edition), 2018, 17(1):136-142(in Chinese). doi: 10.3969/j.issn.1672-8106.2018.01.017
|
| [7] |
BYUNG D S, KYUNGSU P, JONGHOE K.Persistent UAV delivery logistics:MILP formulation and efficient heuristic[J].Computers & Industrial Engineering, 2018, 120:418-428. https://www.sciencedirect.com/science/article/pii/S0360835218302146
|
| [8] |
BOUALEM R, CHRISTIAN W, GERALD R.A drone fleet model for last-mile distribution in disaster relief operations[J].International Journal of Disaster Risk Reduction, 2018, 28:107-112. doi: 10.1016/j.ijdrr.2018.02.020
|
| [9] |
SCOTT J E, SCOTT C H.Drone delivery models for healthcare[J].International Journal of Healthcare Information Systems and Informatics, 2018, 13(3):20-34. doi: 10.4018/IJHISI.2018070102
|
| [10] |
周浪.农村电商物流配送"配送车+无人机"路径优化研究[D].武汉: 武汉理工大学, 2017.
ZHOU L.Research on the route optimization of rural E-commercial distribution based on 'vehicle-unmanned aircraft'[D].Wuhan: Wuhan University of Technology, 2017(in Chinese).
|
| [11] |
翁丹宁.无人机物流配送的主要影响因素分析[J].企业改革与管理, 2015(8):170. http://d.old.wanfangdata.com.cn/Periodical/qyggygl201508158
WENG D N.Analysis on the main influencing factors of UAV logistics distribution[J].Enterprise Reform and Management, 2015(8):170(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/qyggygl201508158
|
| [12] |
吴永鑫.物流无人机在中国农村电商物流市场应用研究[D].深圳: 深圳大学, 2017.
WU Y X.The research of the application of the logistics unmanned aerial vehicle in the China's rural electricity supplier logistics[D].Shenzhen: Shenzhen University, 2017(in Chinese).
|
| [13] |
JIANG X W, ZHOU Q, YE Y.Method of task assignment for UAV based on particle swarm optimization in logistics[C]//Proceedings of the 2017 International Conference on Intelligent Systems, Metaheuristics & Swarm Intelligence.New York: ACM, 2017: 113-117.
|
| [14] |
DORLING K, HEINRICHS J, MESSIER G G, et al.Vehicle routing problems for drone delivery[J].IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2016, 47(1):70-85. https://ieeexplore.ieee.org/document/7513397/
|
| [15] |
TORABBEIGI M, LIM G J, KIM S J.Drone delivery scheduling optimization considering payload-induced battery consumption rates[J].Journal of Intelligent & Robotic Systems, 2020, 97(3):471-487. doi: 10.1007/s10846-019-01034-w
|
| [16] |
GOSS K, MUSMECI R, SILVESTRI S.Realistic models for characterizing the performance of unmanned aerial vehicles[C]//201726th International Conference on Computer Communication and Networks(ICCCN).Piscataway: IEEE Press, 2017: 1-9.
|
| [17] |
ABEYWICKRAMA H V, JAYAWICKRAMA B A, HE Y, et al.Comprehensive energy consumption model for unmanned aerial vehicles, based on empirical studies of battery performance[J].IEEE Access, 2018, 6:58383-58394. doi: 10.1109/ACCESS.2018.2875040
|
| [18] |
李月茹.四旋翼无人机航迹规划算法研究[D].沈阳: 沈阳航空航天大学, 2018.
LI Y R.The algorithm study of four-rotor UAV route planning[D].Shenyang: Shenyang Aerospace University, 2018(in Chinese).
|
| [19] |
徐晨晨, 廖小罕, 岳焕印, 等.基于改进蚁群算法的无人机低空公共航路构建方法[J].地球信息科学学报, 2019, 21(4):570-579. http://d.old.wanfangdata.com.cn/Periodical/dqxxkx201904010
XU C C, LIAO X H, YUE H Y, et al.Construction of a UAV low-altitude public air route based on an improved ant colony algorithm[J].Journal of Geo-Information Science, 2019, 21(4):570-579(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/dqxxkx201904010
|
| [20] |
任逸晖.一种新的4D航路规划算法及其仿真[D].西安: 西安电子科技大学, 2017.
REN Y H.A new kind 4D route planning algorithm and simulation[D].Xi'an: Xidian University, 2017(in Chinese).
|
| [21] |
KELLER J, THAKUR D, LIKHACHEV M, et al.Coordinated path planning for fixed-wing UAS conducting persistent surveillance missions[J].IEEE Transactions on Automation Science and Engineering, 2017, 14(1):17-24. doi: 10.1109/TASE.2016.2623642
|
| [22] |
刘源, 王海泉.基于理论最短距离变权重A*算法的路径规划[J].计算机测量与控制, 2018, 26(4):175-178. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz201804046
LIU Y, WANG H Q.Path planning based on theoretical minimum distance of A* algorithm[J].Computer Measurement & Control, 2018, 26(4):175-178(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz201804046
|

Figures(9) / Tables(6)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: