| Citation: | YANG Zhenshu, MAO Qi, DOU Liqianet al. Interval type-2 adaptive fuzzy sliding mode control design of reentry attitude for reusable launch vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 781-790. doi: 10.13700/j.bh.1001-5965.2019.0474(in Chinese)

|
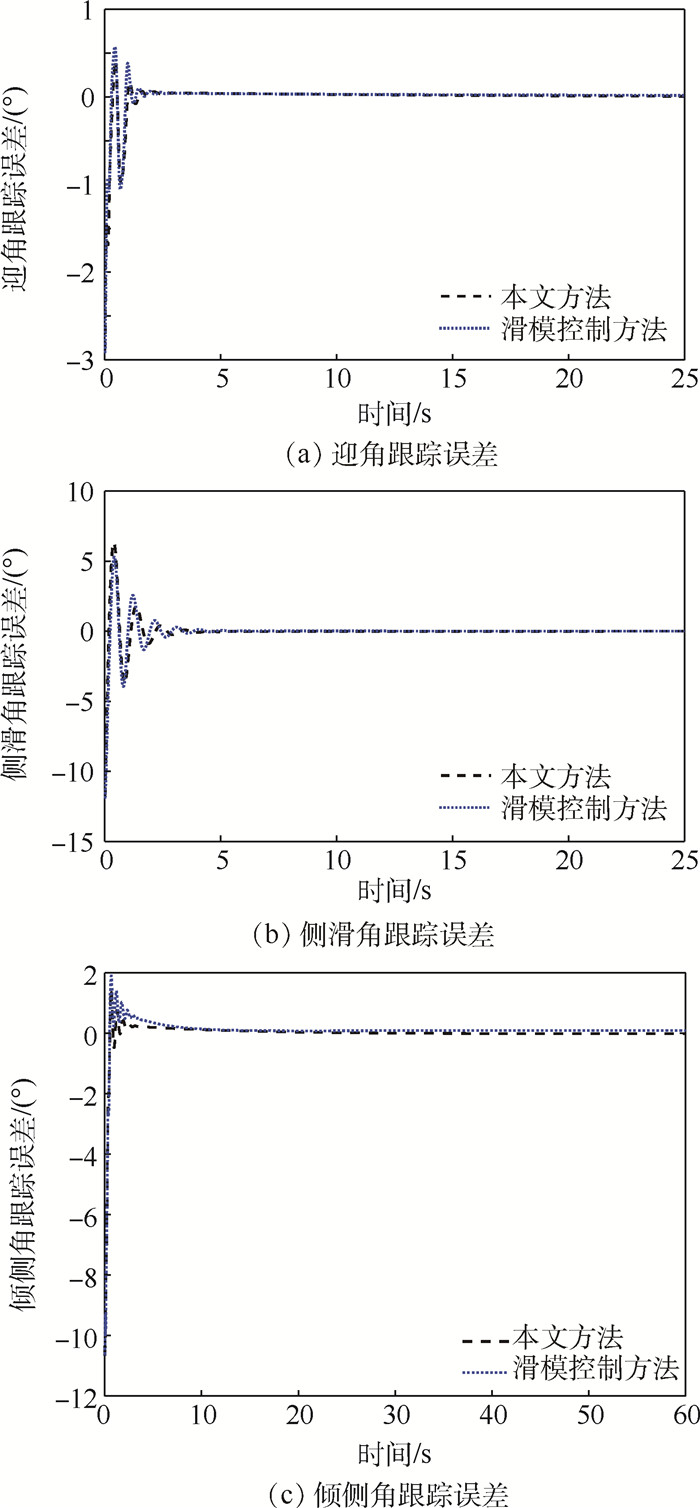
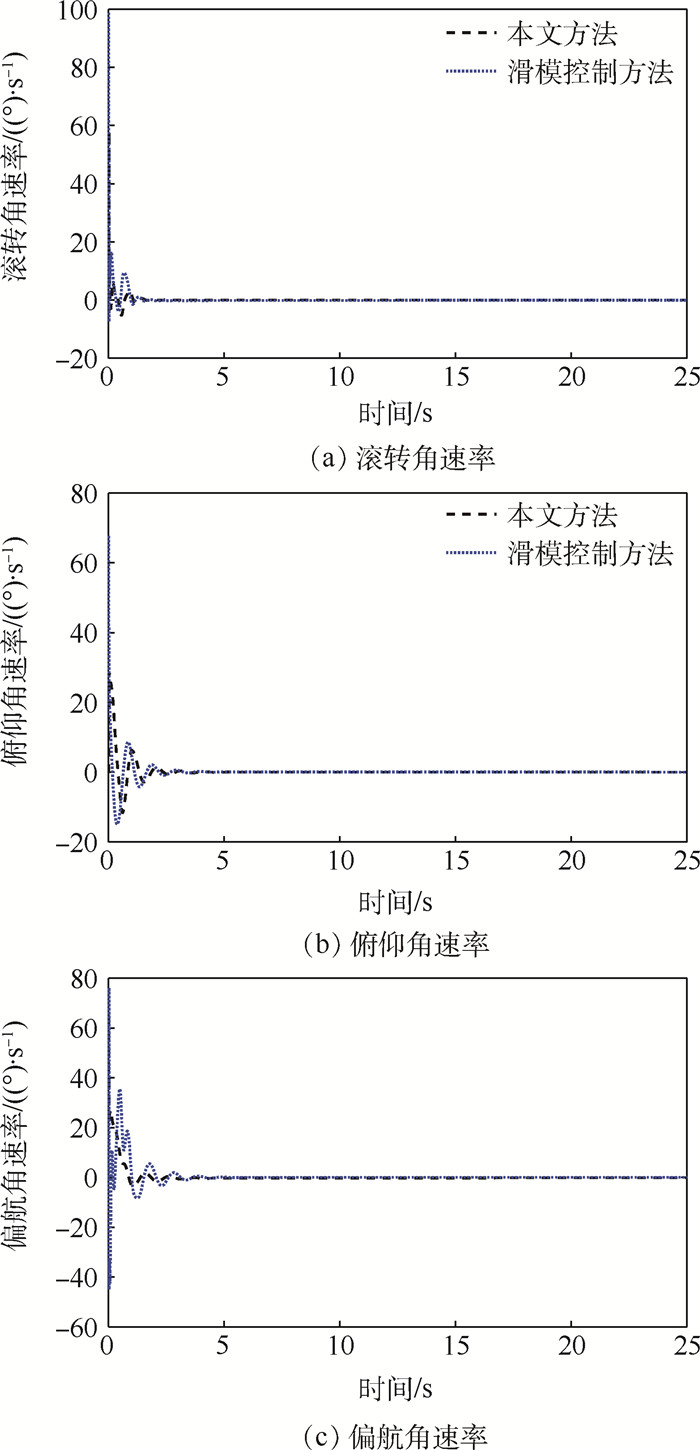
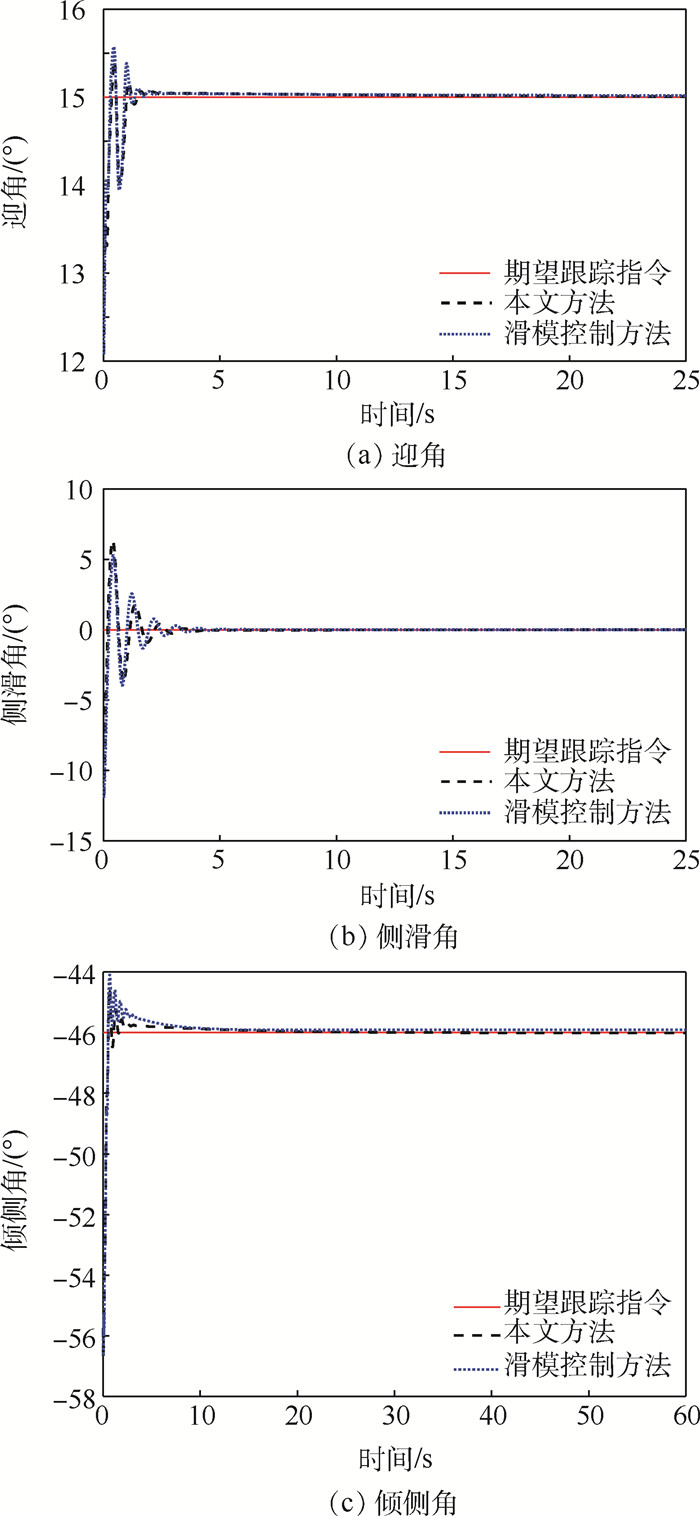
Considering the attitude tracking problem for reusable launch vehicles (RLVs) during reentry phase with high nonlinear and multi-variable coupling characteristics in the presence of parameter uncertainties and external disturbances, an interval type-2 adaptive fuzzy sliding mode based attitude control method is proposed in this paper. Firstly, the dynamic model for the RLV is developed, which is further transformed into attitude angle and angular rate subsystems using backstepping method. Secondly, the parameter uncertainties and external disturbances of the RLV model are regarded as part of the nonlinear terms of the subsystems. Thirdly, the nonlinear terms of the subsystems are approximated by the interval type-2 fuzzy system, while the virtual control signal and the actual control signal can be obtained respectively by combining the adaptive technique and sliding mode control method. Besides, the first-order low-pass filter is used to deal with the virtual control law of subsystem. The stability of the closed-loop control system is guaranteed via Lyapunov theory and the attitude tracking error can converge to a small neighborhood around the origin. Finally, the numerical simulation on the reentry vehicle is conducted to verify that the developed control method can track the reference commands effectively and have strong robustness again external disturbances.

| [1] |
HALBE O, RAJA R G, PADHI R.Robust reentry guidance of a reusable launch vehicle using model predictive static programming[J].Journal of Guidance, Control, and Dynamics, 2014, 37(1):134-148. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0d5ec783c601896babdde2bea08afbef
|
| [2] |
窦立谦, 毛奇, 苏沛华.基于自适应模糊控制的可重复使用运载器再入姿态控制[J].控制与决策, 2018, 37(7):1181-1189. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201807003
DOU L Q, MAO Q, SU P H.Adaptive fuzzy attitude control design for reentry RLV[J].Control and Decision, 2018, 37(7):1181-1189(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201807003
|
| [3] |
GAO Z, JIANG B, SHI P, et al.Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique[J].Journal of the Franklin Institute, 2012, 349(4):1543-1560. doi: 10.1016/j.jfranklin.2011.11.003
|
| [4] |
XU B, ZHANG Y.Neural discrete back-stepping control of hypersonic flight vehicle with equivalent prediction model[J].Neurocomputing, 2015, 154:337-346. doi: 10.1016/j.neucom.2014.11.059
|
| [5] |
GROVES K P, SIGTHORSSON D O, SERRANI A, et al.Reference command tracking for a linearized model of an air-breathing hypersonic vehicle[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit.Reston: AIAA, 2005: 2901-2914.
|
| [6] |
GEORGIE J, VALASEK J.Evaluation of longitudinal desired dynamics for dynamic-inversion controlled generic reentry vehicles[J].Journal Guidance, Control, and Dynamics, 2003, 26(5):811-819. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=aaf227e20b65fc8e13eb10588602b332
|
| [7] |
FIORENTINI L, SERRANI A, BOLENDER M A, et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicle model[J].Journal of Guidance, Control, and Dynamics, 2009, 32(2):401-416.
|
| [8] |
刘燕斌, 陆宇平, 何真.高超音速飞机鲁棒自适应控制的研究[J].宇航学报, 2006, 27(4):620-624. doi: 10.3321/j.issn:1000-1328.2006.04.010
LIU Y B, LU Y P, HE Z.Research on robust adaptive control for hypersonic vehicle[J].Journal of Astronautics, 2006, 27(4):620-624(in Chinese). doi: 10.3321/j.issn:1000-1328.2006.04.010
|
| [9] |
WANG F, HUA C, ZONG Q.Attitude control of reusable launch vehicle in reentry phase with input constraint via robust adaptive backstepping control[J].International Journal of Adaptive Control and Signal Processing, 2015, 29(10):1308-1327. doi: 10.1002/acs.2541
|
| [10] |
FALCOZ A, HENRY D, ZOLGHADRI A.Robust fault diagnosis for atmospheric reentry vehicles:A case study[J].IEEE Transactions on Systems, Man, and Cybernetics-Part A:Systems and Humans, 2010, 40(5):886-899. doi: 10.1109/TSMCA.2010.2063022
|
| [11] |
SHTESSEL Y B, BUFFINGTON J, BANDA S.Multiple timescale flight control using reconfigurable sliding modes[J].Journal of Guidance, Control, and Dynamics, 1999, 22(6):873-883.
|
| [12] |
STOTT J E, SHTESSEL Y B.Launch vehicle attitude control using sliding mode control and observation techniques[J].Journal of the Franklin Institute, 2012, 349(2):397-412. doi: 10.1016/j.jfranklin.2011.07.020
|
| [13] |
LIU J, VAZQUEZ S, WU L, et al.Extended state observer-based sliding-mode control for three-phase power converters[J].IEEE Transactions on Industrical Electronics, 2016, 64(1):22-31. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5029b59f62e23ad7540391389f5c9927
|
| [14] |
FU C, SARABAKHA A, KAYACAN E, et al.Input uncertainty sensitivity enhanced nonsingleton fuzzy logic controllers for long-term navigation of quadrotor UAVs[J].IEEE/ASME Transactions on Mechatronics, 2018, 23(2):725-734. https://ieeexplore.ieee.org/document/8304792/
|
| [15] |
SHEN Q, JIANG B, COCQUEMPOT V.Fuzzy logic system-based adaptive fault-tolerant control for near-space vehicle attitude dynamics with actuator faults[J].IEEE Transactions on Fuzzy Systems, 2013, 21(2):289-300. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e8fbeeb48881ae9abb95d36af680f840
|
| [16] |
MAO Q, DOU L, ZONG Q, et al.Attitude controller design for reusable launch vehicles during reentry phase via compound adaptive fuzzy H-infinity control[J].Aerospace Science and Technology, 2018, 72:36-48. doi: 10.1016/j.ast.2017.10.012
|
| [17] |
KAYACAN E, RAMON H, KAYNAK O, et al.Towards agrobots:Trajectory control of an autonomous tractor using type-2 fuzzy logic controllers[J].IEEE/ASME Transactions on Mechatronics, 2015, 20(1):287-298. https://core.ac.uk/display/34605030
|
| [18] |
LIANG Q, MENDEL J M.Interval type-2 fuzzy logic systems:Theory and design[J].IEEE Transactions on Fuzzy Systems, 2000, 8(5):535-550. doi: 10.1109/91.873577
|
| [19] |
WU H, MENDEL J M.Uncertainty bounds and their use in the design of interval type-2 fuzzy logic systems[J].IEEE Transactions on Fuzzy Systems, 2002, 10(5):622-639. doi: 10.1109/TFUZZ.2002.803496
|
| [20] |
LI H, WU C, SHI P, et al.Control of nonlinear networked systems with packet dropouts:Interval type-2 fuzzy model-based approach[J].IEEE Transactions on Cybernetics, 2014, 45(11):2378-2389. https://www.ncbi.nlm.nih.gov/pubmed/25474817
|
| [21] |
KUMBASAR T.Robust stability analysis and systematic design of single input interval type-2 fuzzy logic controllers[J].IEEE Transactions on Fuzzy Systems, 2016, 24(3):675-694. doi: 10.1109/TFUZZ.2015.2471805
|
| [22] |
TAO X, YI J, YUAN R, et al.Control of a flexible air-breathing hypersonic vehicle with measurement noises using adaptive interval type-2 fuzzy logic system[C]//IEEE International Conference on Fuzzy Systems.Piscataway, NJ: IEEE Press, 2017.
|
| [23] |
WANG L X.Stable adaptive fuzzy control of nonlinear systems[J].IEEE Transactions on Fuzzy Systems, 1993, 1(2):146-155. doi: 10.1109/91.227383
|
| [24] |
WANG F, HUA C, ZONG Q.Attitude control of reusable launch vehicle in reentry phase with input constraint via robust adaptive backstepping control[J].International Journal of Adaptive Control and Signal Processing, 2015, 29(10):1308-1327. doi: 10.1002/acs.2541
|
Figures(4) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: