| Citation: | AN Ping, WANG Guoping, YU Jiadong, et al. An efficient and accurate visual SLAM loop closure detection algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(1): 24-30. doi: 10.13700/j.bh.1001-5965.2019.0642(in Chinese)

|
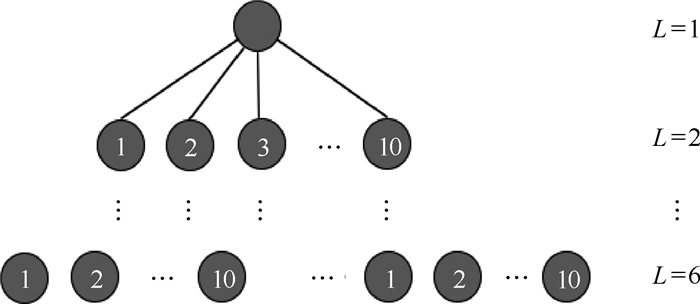
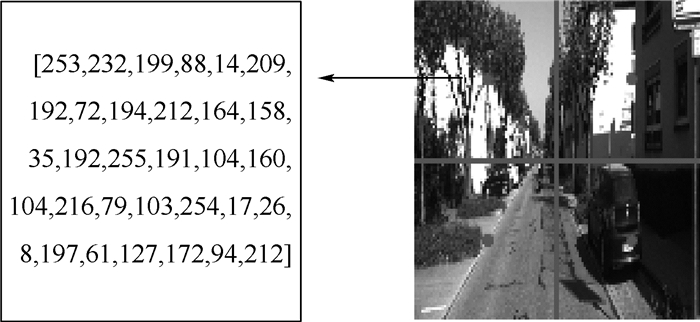
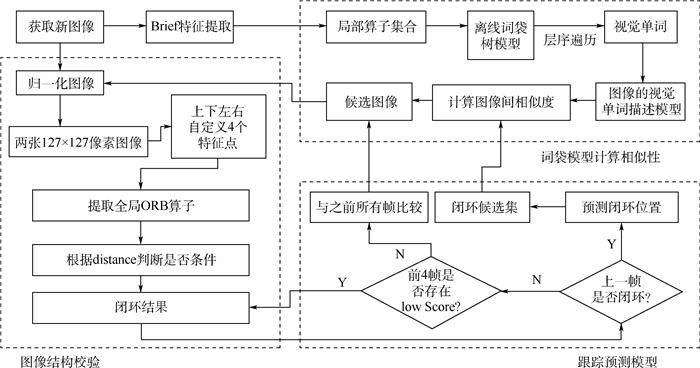
Simultaneous Localization and Mapping (SLAM) is one of the key technologies in visual navigation, and loop closure detection is a basis of SLAM. An efficient and accurate loop closure detection algorithm is proposed to solve the problem of low accuracy rate of SLAM loop closure detection. The loop closure detection algorithm consists of bag of words module, structure checking module, and tracking module. First, we design the bag of words model and structure checking module, combining local features with holistic features. The bag of words model compares the image similarities using visual words to obtain the closed-loop candidate frame. Then, structure checking module grayscales and normalizes the current image and the closed-loop candidate image. The normalized images are directly used as the patch of local feature to obtain holistic feature. Whether the closed-loop candidate frame is a valid closed loop is determined by the holistic descriptor. To address the problem that time consumption increases rapidly with the increase of image numbers, we design the tracking module to improve the computational efficiency. The comparative experiments with DBoW algorithm show that the proposed algorithm improves the accuracy by more than 20% and also has better real-time performance.

| [1] |
GUI J J, GU D B, WANG S, et al.A review of visual inertial odometry from filtering and optimisation perspectives[J].Advanced Robotics, 2015, 29(20):1289-1301. doi: 10.1080/01691864.2015.1057616
|
| [2] |
何俊学, 李战明.基于视觉的同时定位与地图构建方法综述[J].计算机应用研究, 2010, 27(8):2839-2844. doi: 10.3969/j.issn.1001-3695.2010.08.007
HE J X, LI Z M.Survey of vision-based approach to simultaneous localization and mapping[J].Application Research of Computers, 2010, 27(8):2839-2844(in Chinese). doi: 10.3969/j.issn.1001-3695.2010.08.007
|
| [3] |
HESS W, KOHLER D, RAPP H H.Systems and methods of detecting loop closure in simultaneous localization and mapping (SLAM) applications: U.S.14/972, 938[P].2019-06-11.
|
| [4] |
CLEMENTE L, DAVISON A.Mapping large loops with a single hand-held camera[C]//Robotics Science and Systems, 2007, 2(2): 297-304.
|
| [5] |
WILLIAMS B, CUMMINS M, NEIRA J, et al.An image-to-map loop closing method for monocular SLAM[C]//IEEE International Conference on Intelligent Robots and Systems.Piscataway: IEEE Press, 2008: 2053-2059.
|
| [6] |
刘强, 段富海.复杂环境下视觉SLAM闭环检测方法综述[J].机器人, 2018, 40(6):123-136.
LIU Q, DUAN F H.A survey of loop-closure detection method of visual SLAM in complex environments[J].Robot, 2018, 40(6):123-136(in Chinese).
|
| [7] |
刘国忠, 胡钊政.基于SURF和ORB全局特征的快速闭环检测[J].机器人, 2017, 39(1):36-45. doi: 10.3969/j.issn.1004-6437.2017.01.005
LIU G Z, HU Z Z.Fast loop closure detection based on holistic features from SURF and ORB[J].Robot, 2017, 39(1):36-45(in Chinese). doi: 10.3969/j.issn.1004-6437.2017.01.005
|
| [8] |
KROSE B J A, VLASSIS N, BUNSCHOTEN R, et al.A probabilistic model for appearance-based robot localization[J].Image & Vision Computing, 2001, 19(6):381-391.
|
| [9] |
LOWRY S M, WYETH G F, MILFORD M J.Unsupervised online learning of condition-invariant images for place recognition[J].Procedia-Social and Behavioral Sciences, 2014, 106:1418-1427.
|
| [10] |
CUMMINS M, NEWMAN P.Probabilistic appearance based navigation and loop closing[C]//Proceedings 2007 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2007: 2042-2048.
|
| [11] |
GALVEZ-LOPEZ D, TARDOS J D.Bags of binary words for fast place recognition in image sequences[J].IEEE Transactions on Robotics, 2012, 28(5):1188-1197. doi: 10.1109/TRO.2012.2197158
|
| [12] |
MUR-ARTAL R, TARDOS J D.ORB-SLAM2:An open-source SLAM system for monocular, stereo, and RGB-D cameras[J].IEEE Transactions on Robotics, 2017, 33(5):1255-1262. doi: 10.1109/TRO.2017.2705103
|
| [13] |
梁志伟, 陈燕燕, 朱松豪, 等.基于视觉词典的单目视觉闭环检测算法[J].模式识别与人工智能, 2013, 26(6):561-570. doi: 10.3969/j.issn.1003-6059.2013.06.007
LIANG Z W, CHEN Y Y, ZHU S H, et al.Loop closure detection algorithm based on monocular vision using visual dictionary[J].Pattern Recognition and Artificial Intelligence, 2013, 26(6):561-570(in Chinese). doi: 10.3969/j.issn.1003-6059.2013.06.007
|
| [14] |
GUCLU O, CAN A B.Fast and effective loop closure detection to improve SLAM performance[J].Journal of Intelligent and Robotic Systems, 2019, 93(3-4):495-517. doi: 10.1007/s10846-017-0718-z
|
| [15] |
ZHANG G, YAN X, YE Y.Loop closure detection via maximization of mutual information[J].IEEE Access, 2019, 7:124217-124232. doi: 10.1109/ACCESS.2019.2937967
|
Figures(9) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: