| Citation: | ZHANG Dazhi, LIU Wanhui, MIAO Cunxiao, et al. Dynamic obstacle avoidance method for omnidirectional mobile robots[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(6): 1115-1123. doi: 10.13700/j.bh.1001-5965.2020.0155(in Chinese)

|
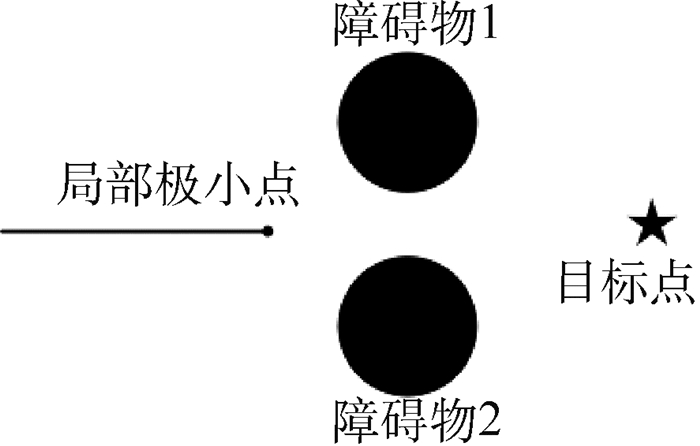
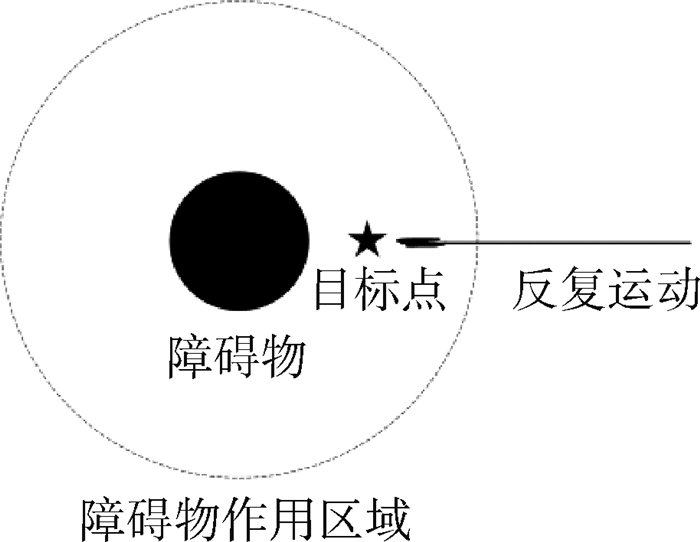
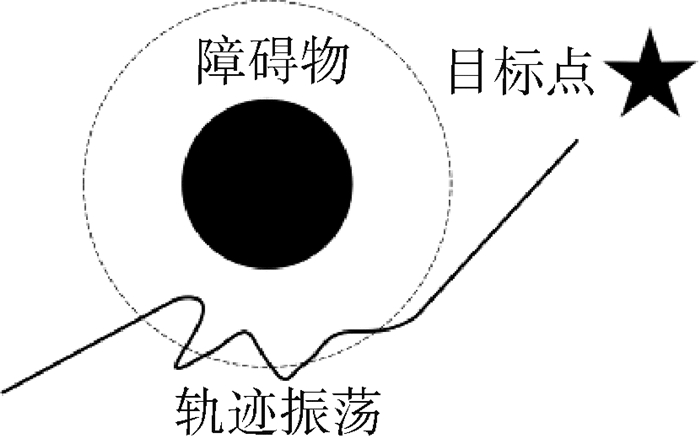
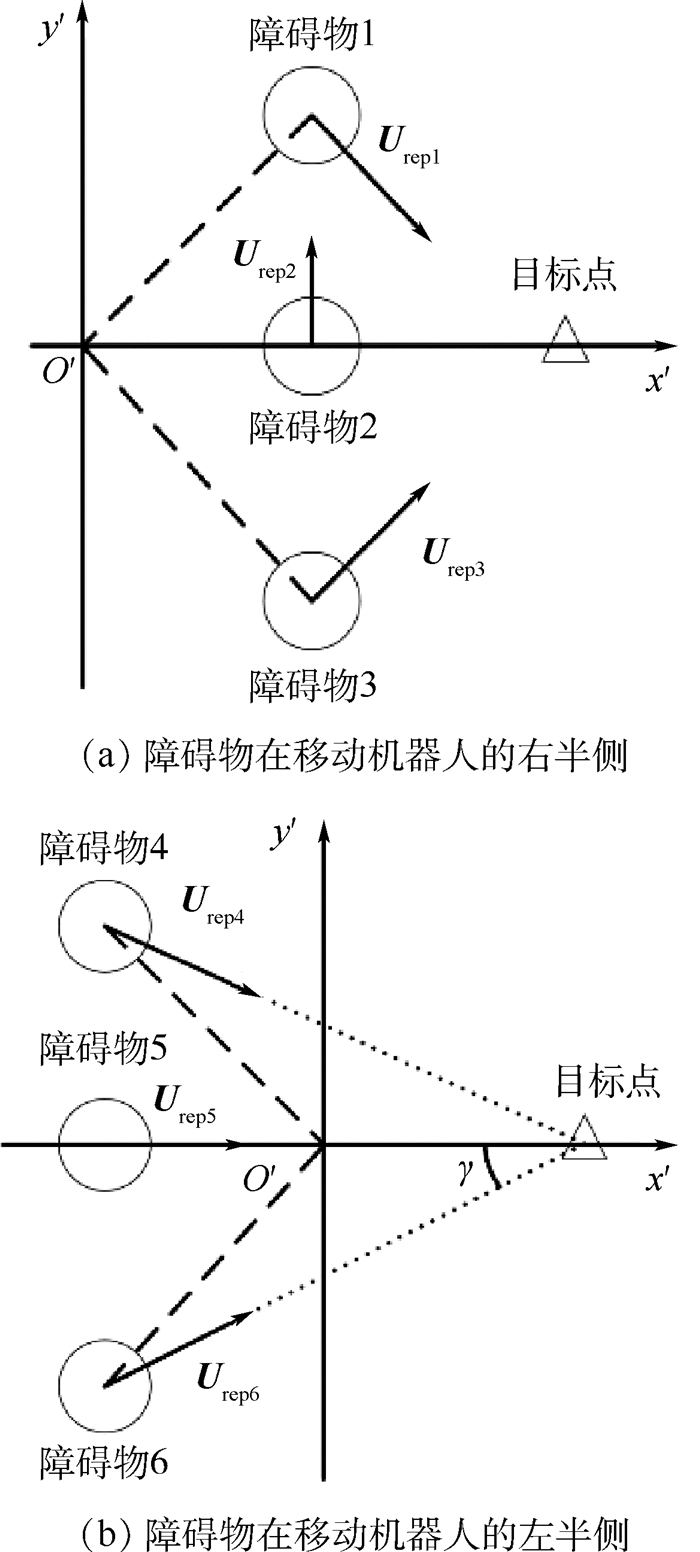
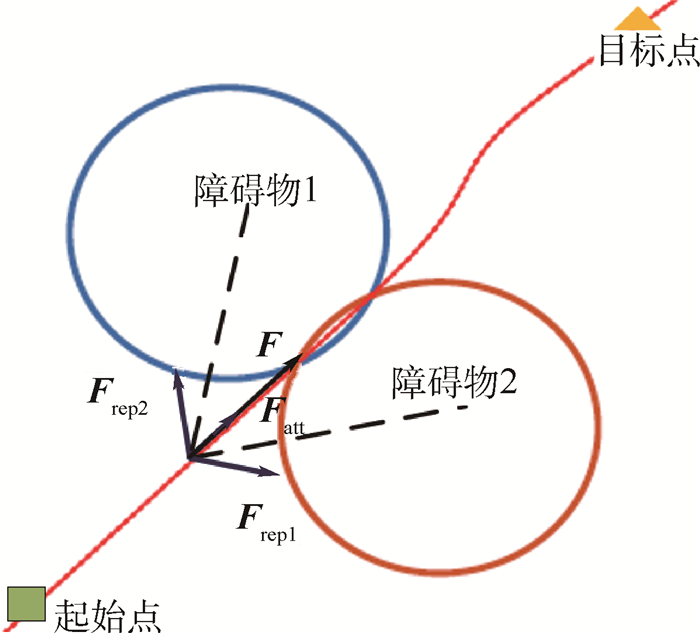
Dynamic obstacle avoidance is an indispensable ability of omnidirectional mobile robots in complex working environments. The idea of water flow field is used to redefine the repulsive potential field function of artificial potential field and its direction, which solves the problems of traditional artificial potential field method, such as easily falling into local minimum point, inaccessible target point and oscillation. The improved algorithm can make the robot reach the target point smoothly and safely without increasing the amount of calculation, and realize the obstacle avoidance process. At the same time, in order to achieve three-dimensional dynamic simulation, a joint simulation method based on V-REP and MATLAB is proposed. By constructing a three-dimensional dynamic simulation environment, the dynamic obstacle avoidance simulation of omnidirectional mobile robot was realized by the proposed method combined with the improved artificial potential field method, and the smoothness and feasibility of the algorithm are verified. Finally, the algorithm was applied to the real scene in the laboratory, and the omnidirectional mobile robot successfully realized the dynamic avoidance action, which verifies the practicability of the algorithm.

| [1] |
QIAN J, ZI B, WANG D, et al. The design and development of an omnidirectional mobile robot oriented to an intelligent manufacturing system[J]. Sensors, 2017, 17(9): 2073. doi: 10.3390/s17092073
|
| [2] |
DAI X L, LONG S, ZHANG Z W, et al. Mobile robot path planning based on ant colony algorithm with A* heuristic method[J/OL]. Frontiers in Neurorobotics, 2019(2019-04-16)[2020-04-01]. https://doi.org/10.3389/fnbot.2019.00015.
|
| [3] |
WEI W Q. Research on path planning of mobile robot based on artificial neural network[C]//20192nd International Conference on Intelligent Systems Research and Mechatronics Engineering. London: Francis Academic Press, 2019: 433-436.
|
| [4] |
LLEWYN S, DAVID H, GIACOMO I, et al. Parameter optimization and learning in a spiking neural network for UAV obstacle avoidance targeting neuromorphic processors[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(9): 3305-3318. doi: 10.1109/TNNLS.2019.2941506
|
| [5] |
DOORAKI A R, LEE D J. An end-to-end deep reinforcement learning-based intelligent agent capable of autonomous exploration in unknown environments[J]. Sensors, 2018, 18(10): 2-17. doi: 10.1109/JSEN.2018.2815425
|
| [6] |
MIHAI D, MOGAN G. Neural networks based reinforcement learning for mobile robots obstacle avoidance[J]. Expert Systems with Applications, 2016, 62: 104-115. doi: 10.1016/j.eswa.2016.06.021
|
| [7] |
QIANG N, GAO J. A new method for mobile robot path planning based on particle swarm optimization algorithm[C]//20172nd International Conference on Advances in Materials Mechatronics and Civil Engineering. Amsterdam: Atlantis Press, 2017, 131: 95-98.
|
| [8] |
WANG B F, LI S, GUO J, et al. Car-like mobile robot path planning in rough terrain using multi-objective particle swarm optimization algorithm[J]. Neurocomputing, 2018, 282: 42-51. doi: 10.1016/j.neucom.2017.12.015
|
| [9] |
NASRINAHAR A, CHUAH J H. Intelligent motion planning of a mobile robot with dynamic obstacle avoidance[J]. Journal on Vehicle Routing Algorithms, 2018, 1: 89-104. doi: 10.1007/s41604-018-0007-4
|
| [10] |
KUNDU S, DDYAL R P. Reactive navigation of underwater mobile robot using ANFIS approach in a manifold manner[J]. International Journal of Automation and Computing, 2017, 14(3): 307-320. doi: 10.1007/s11633-016-0983-5
|
| [11] |
EDUARDO J M, ÁNGEL L, MANUEL O. Dynamic window based approaches for avoiding obstacles in moving[J]. Robotics and Autonomous Systems, 2019, 118: 112-130. doi: 10.1016/j.robot.2019.05.003
|
| [12] |
GUO Z T, HU H J, FENG F. 3D path planning for multi-UAV base on artificial potential field method[C]//International Conference on Electronic, Control, Automation and Mechanical Engineering, 2017: 86-91.
|
| [13] |
HU X P, LI Z Y, CAO J. A path planning method based on artificial potential field improved by potential flow theory[C]//20172nd International Conference on Computer Science and Technology, 2017: 617-625.
|
| [14] |
LAZAROWSKA A. Discrete artificial potential field approach to mobile robot path planning[J]. IFAC PapersOnLine, 2019, 52(8): 277-282. doi: 10.1016/j.ifacol.2019.08.083
|
| [15] |
OSCAR M, ULISES O R, ROBERTO S. Path planning for mobile robots using bacterial potential field for avoiding static and dynamic obstacles[J]. Expert Systems with Applications, 2015, 42(12): 5177-5191. doi: 10.1016/j.eswa.2015.02.033
|
| [16] |
WANG L, LI B J, YIN Z H, et al. An improved artificial potential field for unmanned aerial vehicles path planning[C]//20172nd International Conference on Computer Science and Technology, 2017: 510-515.
|
| [17] |
DU Y, NAN Y Y. Research of robot path planning based on improved artificial potential field[C]//Proceedings of the 2nd International Conference on Advances in Mechanical Engineering and Industrial Informatics. Amsterdam: Atlantis Press, 2016: 1024-1029.
|
| [18] |
罗强, 王海宝, 崔小劲, 等. 改进人工势场法自主移动机器人路径规划[J]. 控制工程, 2019, 26(6): 1091-1098. https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201906014.htm
LUO Q, WANG H B, CUI X J, et al. Improved artificial potential field method for autonomous mobile robot path planning[J]. Control Engineering of China, 2019, 26(6): 1091-1098(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201906014.htm
|
| [19] |
梁献霞, 刘朝英, 宋雪玲, 等. 改进人工势场法的移动机器人路径规划研究[J]. 计算机仿真, 2018, 35(4): 291-294. doi: 10.3969/j.issn.1006-9348.2018.04.063
LIANG X X, LIU C Y, SONG X L, et al. Research on path planning of mobile robot based on improved artificial potential field method[J]. Computer Simulation, 2018, 35(4): 291-294(in Chinese). doi: 10.3969/j.issn.1006-9348.2018.04.063
|
| [20] |
杨萌, 王玥. 基于改进人工势场法的无人机避让航迹规划[J]. 导航与控制, 2019, 18(1): 76-83. https://www.cnki.com.cn/Article/CJFDTOTAL-DHKZ201901011.htm
YANG M, WANG Y. UAV evasion trajectory planning based on improved artificial potential field method[J]. Navigation and Control, 2019, 18(1): 76-83(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DHKZ201901011.htm
|

Figures(14) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: