| Citation: | YU Xin, CHEN Renliang. Optimal control of tilt rotor aircraft based on gain scheduling and smooth switching[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(6): 1186-1198. doi: 10.13700/j.bh.1001-5965.2020.0176(in Chinese)

|
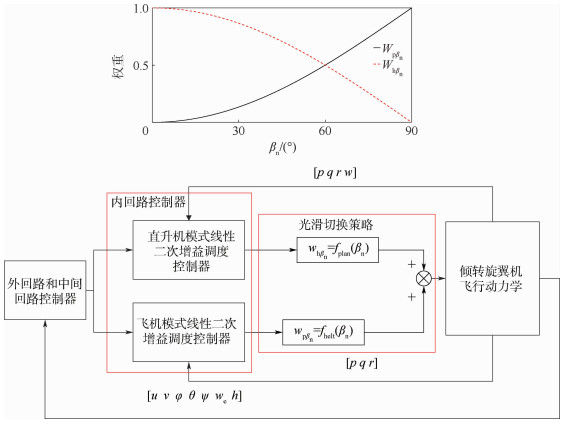
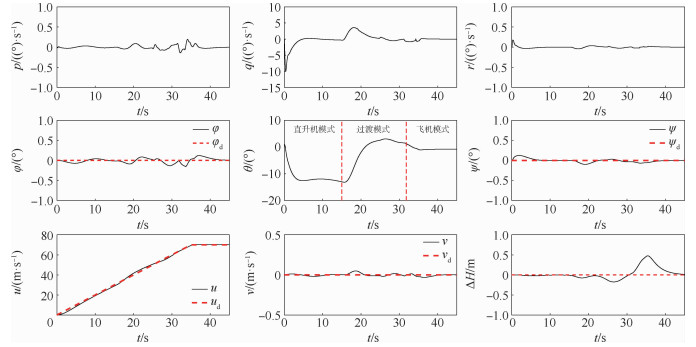
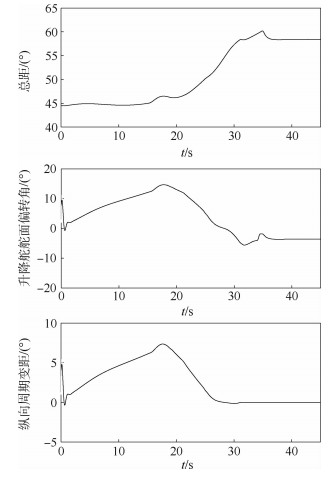
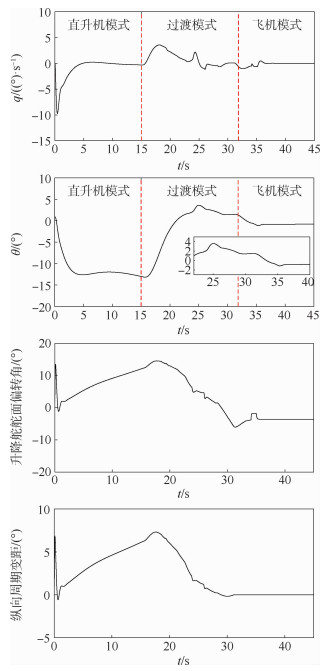
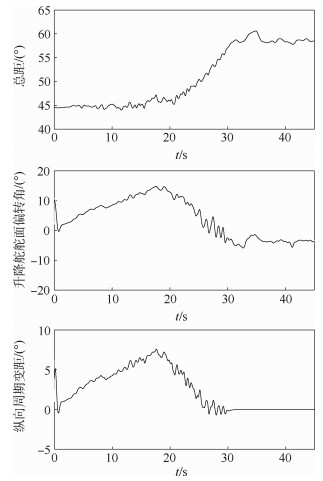
In view of the complex control problem caused by variable mechanical characteristics in conversion maneuver of tilt rotor aircraft, the control synthesis architecture that combines linear quadratic optimal control based on Gain Scheduling (GS) and smooth switching control is proposed to realize global optimal control in conversion maneuver. This control synthesis method alleviates the load of the operating mechanism while guaranteeing the minimum performance index. First, the high-precision flight dynamics model of tilt rotor aircraft was established, and the control redundancy was overcome by mixed control model. Then, a linear quadratic optimal multi-loop controller based on gain scheduling was designed, and two sets of controllers were synthesized by using smooth switching control strategy to realize the smooth transition of attitude in the conversion maneuver. Finally, the full-modes autonomous flight simulation was carried out, which had the desired trajectory of the middle tilting corridor. The simulation results show that the control system has strong robustness and better system performance in the process of conversion maneuver.

| [1] |
KLEINHESSELINK K M. Stability and control modeling of tiltrotor aircraft[D]. Washington, D.C. : University of Maryland, 2007: 3-10.
|
| [2] |
WALZ C, BRICK S, BAUER C. Nacelle control augmentation for tiltrotor flight directors[C]//American Helicopter Society, 1999: 10.
|
| [3] |
MEHRA R K, PRASANTH R K, GOPALASWAMY S. XV-15 tiltrotor flight control system design using model predictive control[C]//1998 IEEE Aerospace Conference Proceedings. Piscataway: IEEE Press, 1998: 139-148.
|
| [4] |
FERGUSON S W. A mathematical model for real time flight simulation of a generic tilt-rotor aircraft: NASA-CR-166536[R]. [S. l. ]: Ames Research Center, 1988: 538.
|
| [5] |
HARENDRA P B J. V/STOL tilt rotor study. Volume 5: A mathematical model for real time flight simulation of the Bell model 301 tilt rotor research aircraft: NASA-CR-114614[R]. : Ames Research Center, 1973.
|
| [6] |
KIMBALL D F. Recent tilt rotor flight control law innovations[J]. Journal of the American Helicopter Society, 1987, 32(3): 33-42. doi: 10.4050/JAHS.32.3.33
|
| [7] |
CALISE A J. RYSDYK R. Research in nonlinear flight control for tiltrotor aircraft operating in the terminal area: NASA-CR-203112[R]. : Ames Research Center, 1995.
|
| [8] |
RYSDYK R, CALISE A, CHEN R, et al. Nonlinear adaptive control of tiltrotor aircraft using neural networks[C]//1997 World Aviation Congress. Reston: AIAA, 1997.
|
| [9] |
KIM B, CALISE A. Nonlinear flight control using neural networks[C]//Guidance, Navigation, and Control Conference. Reston: AIAA, 1994.
|
| [10] |
GADEWADIKAR J, LEWIS F, SUBBARAO K, et al. Structured H-infinity command and control-loop design for unmanned helicopters[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(4): 1093-1102. doi: 10.2514/1.31377
|
| [11] |
YANGUO S, HUANJIN W. Design of flight control system for a small unmanned tilt rotor aircraft[J]. Chinese Journal of Aeronautics, 2009, 22(3): 250-256. doi: 10.1016/S1000-9361(08)60095-3
|
| [12] |
李晓理, 王伟, 孙维. 多模型自适应控制[J]. 控制与决策, 2000, 15(4): 390-394. doi: 10.3321/j.issn:1001-0920.2000.04.002
LI X L, WANG W, SUN W. Multi models adaptive control[J]. Control and Decision, 2000, 15(4): 390-394(in Chinese). doi: 10.3321/j.issn:1001-0920.2000.04.002
|
| [13] |
郭剑东, 宋彦国, 夏品奇. 倾转旋翼机模型缝合鲁棒控制律设计[J]. 南京航空航天大学学报, 2011, 43(3): 393-398. doi: 10.3969/j.issn.1005-2615.2011.03.020
GUO J D, SONG Y G, XIA P Q. Robust control law design of model stitching for tilt rotor aircraft[J]. Journal of Nanjing University of Aeronautics and Astronautics, 2011, 43(3): 393-398(in Chinese). doi: 10.3969/j.issn.1005-2615.2011.03.020
|
| [14] |
郭剑东. 无人倾转旋翼机飞行控制研究[D]. 南京: 南京航空航天大学, 2013: 64-75.
GUO J D. Research on flight control of unmanned tilt rotor aircraft[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013: 64-75(in Chinese).
|
| [15] |
陈晓, 王晓燕, 王新民, 等. 改进的倾转旋翼机平稳过渡控制系统设计[J]. 计算机工程与应用, 2019, 55(21): 254-260. doi: 10.3778/j.issn.1002-8331.1806-0403
CHEN X, WANG X Y, WANG X M, et al. Improved design of stable transition control system for tilt rotor aircraft[J]. Computer Engineering and Applications, 2019, 55(21): 254-260(in Chinese). doi: 10.3778/j.issn.1002-8331.1806-0403
|
| [16] |
LIU Z, HE Y Q, YANG L Y, et al. Control techniques of tilt rotor unmanned aerial vehicle systems: A review[J]. Chinese Journal of Aeronautics, 2017, 30(1): 135-148. doi: 10.1016/j.cja.2016.11.001
|
| [17] |
SATO M, MURAOKA K. Flight controller design and demonstration of quad-tilt-wing unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(6): 1071-1082. doi: 10.2514/1.G000263
|
| [18] |
MURAOKA K, OKADA N, KUBO D. Quad tilt wing VTOL UAV: Aerodynamic characteristics and prototype flight[C]//AIAA Infotech@Aerospace Conference. Reston: AIAA, 2009.
|
| [19] |
CHEN R T N. A simplified rotor system mathematical model for piloted flight dynamics simulation: NASA N79-23977[R]. [S. l. ]: Ames Research Center, 1979: 29.
|
| [20] |
GAONKAR G, PETERS D. Review of dynamic inflow modeling for rotorcraft flight dynamics[C]//27th Structures, Structural Dynamics and Materials Conference. Reston: AIAA, 1986.
|
| [21] |
CARLSON E, ZHAO Y, CHEN R. Optimal tiltrotor runway operations in one engine inoperative[C]//Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 1999.
|
| [22] |
FERGUSON S W. Developement and validation of a simulation for generic tilt-rotor aircraft: NASA-CR166537[R]. [S. l. ]: Ames Research Center, 1989: 276.
|
| [23] |
ONER K T, CETINSOY E, SIRIMOGLU E, et al. LQR and SMC stabilization of a new unmanned aerial vehicle[J]. World Academy of Science Engineering & Technology, 2011, 3(10): 367-372.
|
| [24] |
KUDINOV Y I, PASHCHENKO F F, KELINA A Y, et al. Analysis of control system models with conventional LQR and fuzzy LQR controller[J]. Procedia Computer Science, 2019, 150: 737-742. doi: 10.1016/j.procs.2019.02.007
|
| [25] |
YANG W, HAMMOUDI M N, HERRMANN G, et al. Two-state dynamic gain scheduling control applied to an F16 aircraft model[J]. International Journal of Non-Linear Mechanics, 2012, 47(10): 1116-1123. doi: 10.1016/j.ijnonlinmec.2011.09.007
|
| [26] |
RAVANBOD L, NOLL D. Gain-scheduled two-loop autopilot for an aircraft[J]. Journal of Dynamic Systems Measurement and Control, 2012, 45(13): 772-777. doi: 10.1115/1.4026832
|
| [27] |
YUE T, WANG L, AI J. Gain self-scheduled H∞ control for morphing aircraft in the wing transition process based on an LPV model[J]. Chinese Journal of Aeronautics, 2013, 26(4): 909-917. doi: 10.1016/j.cja.2013.06.004
|
| [28] |
蔡系海, 付荣, 曾建平. 倾转旋翼机模态转换的鲁棒H∞增益调度控制[J]. 厦门大学学报(自然科学版), 2016, 55(3): 382-389. https://www.cnki.com.cn/Article/CJFDTOTAL-XDZK201603014.htm
CAI X H, FU R, ZENG J P. Robust H∞ gain-scheduling control for mode conversion of tilt rotor aircrafts[J]. Journal of Xiamen University (Natural Science), 2016, 55(3): 382-389(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XDZK201603014.htm
|
| [29] |
SATO M, MURAOKA K. Flight controller design and demonstration of quad-tilt-wing unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2015, 38(6): 1071-1082. doi: 10.2514/1.G000263
|
| [30] |
HERNANDEZ-GARCIA R G, RODRIGUEZ-CORTES H. Transition flight control of a cyclic tiltrotor uav based on the gain-scheduling strategy[C]//2015 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2015: 951-956.
|
| [31] |
HUANGZHONG P, ZIYANG Z, CHEN G. Tiltrotor aircraft attitude control in conversion mode based on optimal preview control[C]//Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference. Piscataway: IEEE Press, 2014: 1544-1548.
|

Figures(20) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: