| Citation: | CUI Zhengyang, WANG Yong. Fault-tolerant fixed-time path following guidance control of UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1619-1627. doi: 10.13700/j.bh.1001-5965.2020.0250(in Chinese)

|
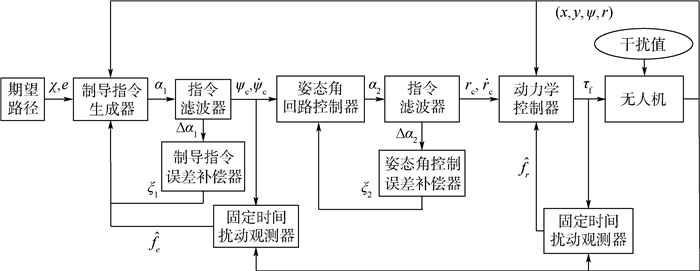
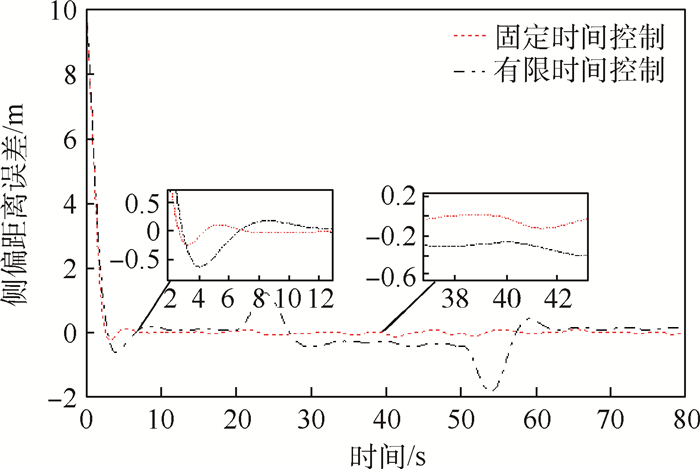
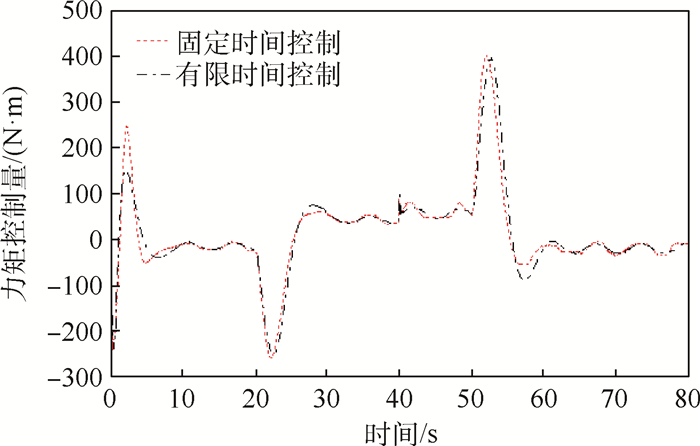
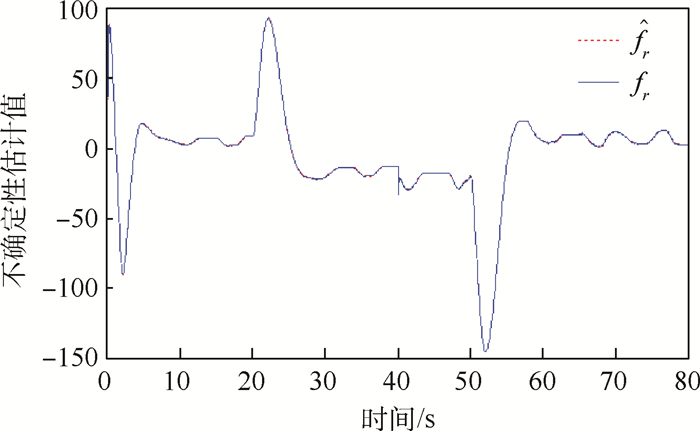
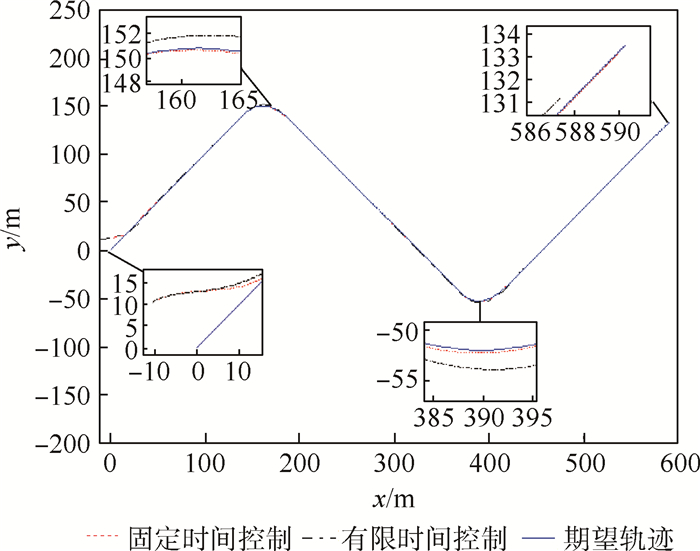
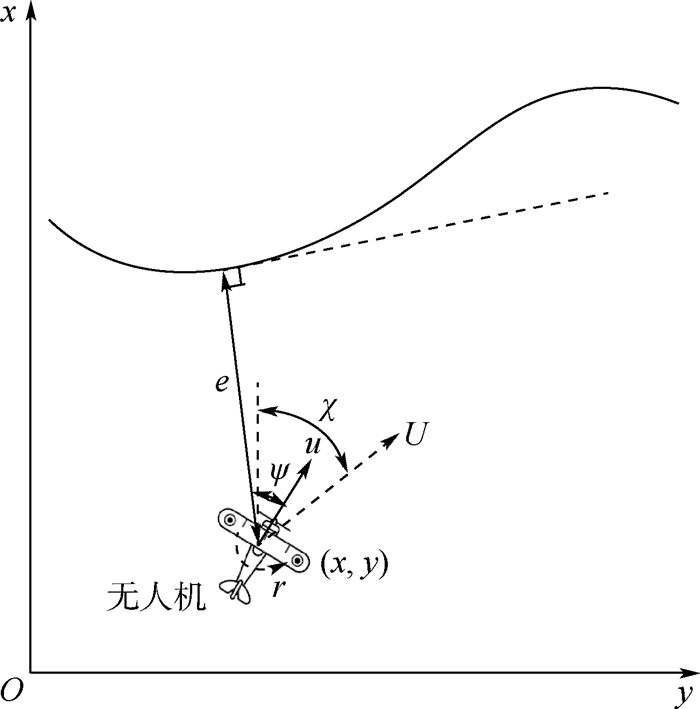
A fault-tolerant fixed-timepath following guidance control method for the UAVs subject to thedisturbancesand actuator faults is studied. Both backstepping and fixed-time convergence techniques are employed for developing the line-of-sight path following control strategies to guarantee the convergence of the UAV to its reference trajectory in fixed time with elegant transient performance. Command filters and auxiliary systems are introduced in the guidance control algorithms design to avoid the arduous calculation of derivatives of virtual control terms in backstepping. To address turning rates constraints of the UAV, the barrier Lyapunov functions are incorporated with the control scheme to prevent the drastic change of the guidance control system states. A nonlinear fixed-time observer is designed for estimating complex unknown external disturbances and eliminating the actuator faults and the influence of external environment disturbance on following performance. Simulation results show the effectiveness and robustness of the proposed line-of-sight path following guidance control algorithm, and it has good path following fault-tolerant control performance.

| [1] |
BERNARD M, KONDAK K, MAZA I, et al. Autonomous transportation and deployment with aerial robots for search and rescue missions[J]. Journal of Field Robotics, 2011, 28(6): 914-931. doi: 10.1002/rob.20401
|
| [2] |
METNI N, HAMEL T. A UAV for bridge inspection: Visual servoing control law with orientation limits[J]. Automation in Construction, 2007, 17(1): 3-10. doi: 10.1016/j.autcon.2006.12.010
|
| [3] |
MAZA I, KONDAK K, BERNARD M, et al. Multi-UAV cooperation and control for load transportation and deployment[C]//The 2nd International Symposium on UAVs. Berlin: Springer, 2009: 417-449.
|
| [4] |
ESCAREÑ J, SALAZAR S, ROMERO H, et al. Trajectory control of a quadrotor subject to 2D wind disturbances[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1-4): 51-63. doi: 10.1007/s10846-012-9734-1
|
| [5] |
MELLINGER D, MICHAEL N, KUMAR V. Trajectory generation and control for precise aggressive maneuvers with quadrotors[J]. The International Journal of Robotics Research, 2012, 31(5): 664-674. doi: 10.1177/0278364911434236
|
| [6] |
MICHAEL N, FINK J, KUMAR V. Cooperative manipulation and transportation with aerial robots[J]. Autonomous Robots, 2011, 30(1): 73-86. doi: 10.1007/s10514-010-9205-0
|
| [7] |
RYSDYK R. UAV path following for constant line-of-sight[C]//2nd AIAA "Unmanned Unlimited" Conference and Workshop & Exhibit. Reston: AIAA, 2003: 6626.
|
| [8] |
SUJIT P B, SARIPALLI S, SOUSA J B. Unmanned aerial vehicle path following: A survey and analysis of algorithms for fixed-wing unmanned aerial vehicless[J]. IEEE Control Systems Magazine, 2014, 34(1): 42-59. doi: 10.1109/MCS.2013.2287568
|
| [9] |
RUBÍ B, PÉREZ R, MORCEGO B. A survey of path following control strategies for UAVs focused on quadrotors[J]. Journal of Intelligent & Robotic Systems, 2019, 98(8): 1-25.
|
| [10] |
ZHAO S, WANG X, ZHANG D, et al. Model predictive control based integral line-of-sight curved path following for unmanned aerial vehicle[C]//AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2017: 1511.
|
| [11] |
FOSSEN T I, PETTERSEN K Y. On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws[J]. Automatica, 2014, 50(11): 2912-2917. doi: 10.1016/j.automatica.2014.10.018
|
| [12] |
FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Transactions on Control Systems Technology, 2014, 23(2): 820-827. http://ieeexplore.ieee.org/document/6868251
|
| [13] |
CUI Z, WANG Y. Nonlinear adaptive line-of-sight path following control of unmanned aerial vehicles considering sideslip amendment and system constraints[J]. Mathematical Problems in Engineering, 2020(5): 1-11. http://www.researchgate.net/publication/339571908_Nonlinear_Adaptive_Line-of-Sight_Path_Following_Control_of_Unmanned_Aerial_Vehicles_considering_Sideslip_Amendment_and_System_Constraints/download
|
| [14] |
POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems[J]. IEEE Transactions on Automatic Control, 2011, 57(8): 2106-2110. http://ieeexplore.ieee.org/document/6104367
|
| [15] |
李锋, 叶川, 李广佳, 等. 临近空间太阳能飞行器横航向稳定性[J]. 航空学报, 2016, 37(4): 1148-1158. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201604007.htm
LI F, YE C, LI G J, et al. Lateral-directional stability of near-space solar-powered aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(4): 1148-1158(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201604007.htm
|
| [16] |
马东立, 张良, 杨穆清, 等. 超长航时太阳能无人机关键技术综述[J]. 航空学报, 2020, 41(3): 29-58. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202003002.htm
MA D L, ZHANG L, YANG M Q, et al. Review of key technologies of ultra-long-endurance solar powered unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(3): 29-58(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202003002.htm
|
| [17] |
YAN X G, EDWARDS C. Nonlinear robust fault reconstruction and estimation using a sliding mode observer[J]. Automatica, 2007, 43(9): 1605-1614. doi: 10.1016/j.automatica.2007.02.008
|
| [18] |
TAN C P, EDWARDS C. Sliding mode observers for detection and reconstruction of sensor faults[J]. Automatica, 2002, 38(10): 1815-1821. doi: 10.1016/S0005-1098(02)00098-5
|
| [19] |
ZHAO L, ZHANG B, YANG H, et al. Finite-time tracking control for pneumatic servo system via extended state observer[J]. IET Control Theory & Applications, 2017, 11(16): 2808-2816. http://ieeexplore.ieee.org/document/8064293/
|
| [20] |
BASIN M, PANATHULA C B, SHTESSEL Y. Multivariable continuous fixed-time second-order sliding mode control: Design and convergence time estimation[J]. IET Control Theory & Applications, 2016, 11(8): 1104-1111. doi: 10.1049/iet-cta.2016.0572
|
| [21] |
CUI R, GE S S, HOW B V, et al. Leader-follower formation control of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2010, 37(17): 1491-1502. http://www.sciencedirect.com/science/article/pii/S0029801810001678
|
| [22] |
ZHANG Y, HUA C, LI K. Disturbance observer-based fixed-time prescribed performance tracking control for robotic manipulator[J]. International Journal of Systems Science, 2019, 50(13): 2437-2448. doi: 10.1080/00207721.2019.1622818
|
| [23] |
FORSSELL L, NILSSON U. ADMIRE the aero-data model in a research environment version 4.0, model description: FOI-R-1624-SE[R]. Stockholm: FOI, 2005.
|
Figures(13) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: