| Citation: | DAI Hongde, ZHENG Weiwei, ZHENG Baidong, et al. Calibration of MEMS accelerometer without turntable based on IFOA[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(10): 1959-1968. doi: 10.13700/j.bh.1001-5965.2020.0349(in Chinese)

|
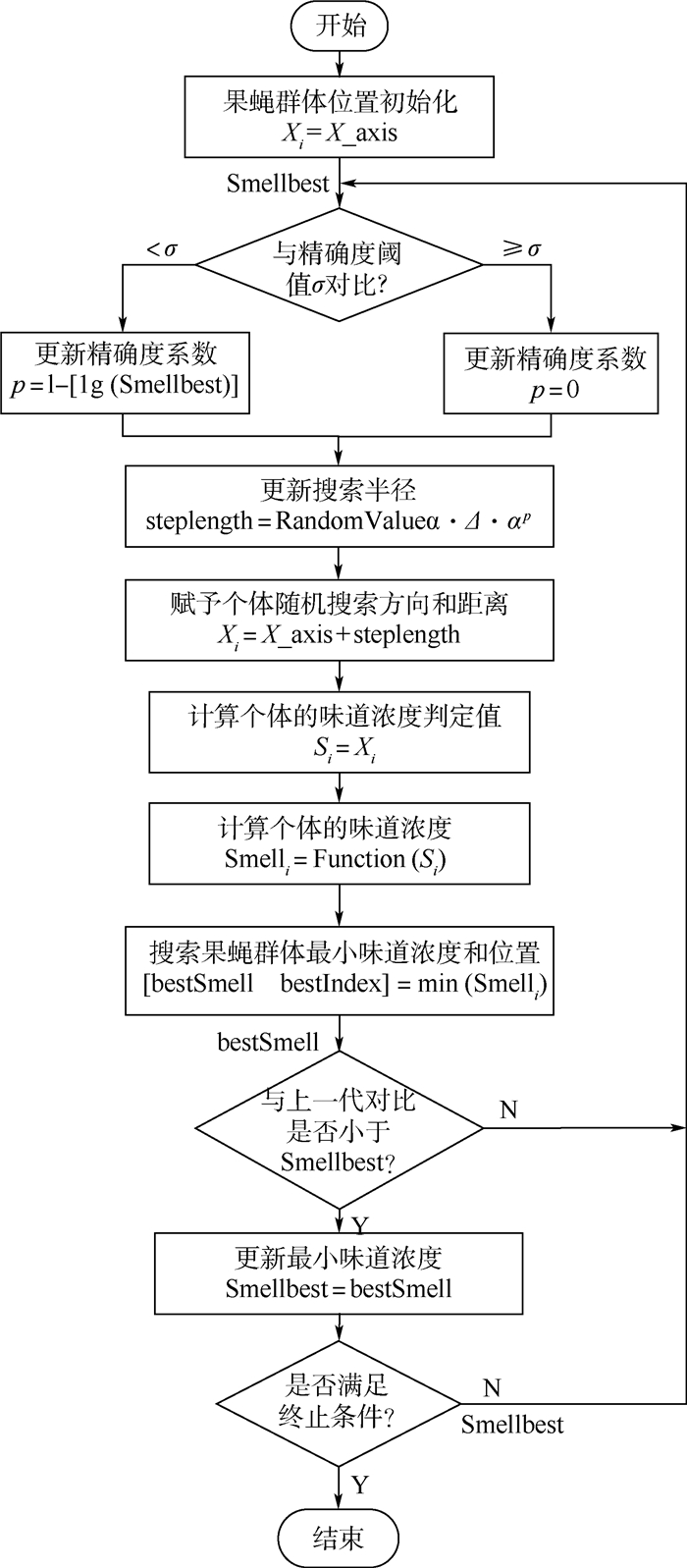
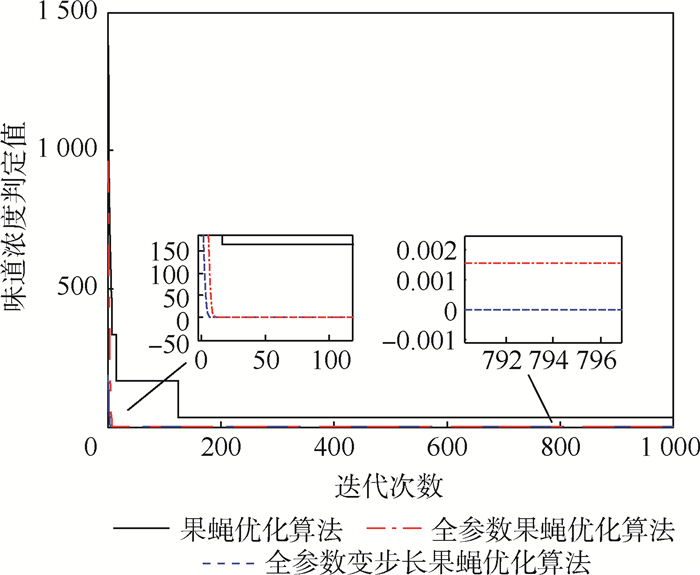
In order to improve the calibration efficiency of Micro-Electro-Mechanical System (MEMS) accelerometers and reduce the dependence on high-precision turntables, a MEMS accelerometer calibration method based on Improved Fruit Fly Optimization Algorithm (IFOA) without turntables is proposed. The method first converts the accelerometer calibration problem into a nonlinear function optimization problem according to the principle of norm-observation. Afterwards, in view of the shortcomings of the classic FOA that can only search for positive parameters and search step size is fixed, the smell concentration judgment value and search step size were improved to make IFOA have global parameter search and variable step size. The two improved performances were tested using the Rosenbrock function. The results show that the IFOA has a global parameter optimization range and higher optimization accuracy than the classic FOA. Finally, the IFOA was applied to solve the nonlinear function optimization problem of accelerometer calibration parameters. The results are compared with those of Newton iteration method and Particle Swarm Optimization (PSO) algorithm. The simulation results show that the IFOA is 1-3 orders of magnitude higher than Newton iteration method in terms of solution accuracy. Compared with Newton iteration method and PSO algorithm, the IFOA improves the running stability by 30% and 34% respectively, and reduces the running time by 15.2% and 43.6% respectively. The IFOA has a good application value in the calibration of accelerometer without turntable
| [1] |
CIUTI G, RICOTTI L, MENCIASSI A, et al. MEMS sensor technologies for human centred applications in healthcare, physical activities, safety and environmental sensing: A review on research activities in Italy[J]. Sensors, 2015, 15(3): 6441-6468. doi: 10.3390/s150306441
|
| [2] |
LIU Y, XIANG G, LU Y, et al. Calibration of MEMS accelerometer based on Kalman filter and the improved six position method[J]. Journal of Communications, 2016, 11(5): 516-522.
|
| [3] |
NEZ A, FRADET L, LAGUILLAUMIE P, et al. Comparison of calibration methods for accelerometers used in human motion analysis[J]. Medical Engineering, 2016, 38(11): 1289-1299. doi: 10.1016/j.medengphy.2016.08.004
|
| [4] |
HE G L, TAO S Q, SHEN Q, et al. Research on calibration and parameter compensation of MEMS inertial sensors based on error analysis[C]//2012 Fifth International Symposium on Computational Intelligence and Design. Piscataway: IEEE Press, 2012: 325-329.
|
| [5] |
田晓春, 李杰, 范玉宝, 等. 一种微惯性测量单元标定补偿方法[J]. 传感技术学报, 2012, 25(10): 1411-1415. doi: 10.3969/j.issn.1004-1699.2012.010.017
TIAN X C, LI J, FAN Y B, et al. A calibration-compensation method for micro inertial measurement unit[J]. Chinese Journal of Sensors and Actuators, 2012, 25(10): 1411-1415(in Chinese). doi: 10.3969/j.issn.1004-1699.2012.010.017
|
| [6] |
于婷, 孙伟, 文剑. MEMS惯性组件的误差特性分析与标定[J]. 传感技术学报, 2016, 29(6): 859-864. doi: 10.3969/j.issn.1004-1699.2016.06.012
YU T, SUN W, WEN J. Error analysis and calibration of MEMS inertial components[J]. Chinese Journal of Sensors and Actuators, 2016, 29(6): 859-864(in Chinese). doi: 10.3969/j.issn.1004-1699.2016.06.012
|
| [7] |
LÖTTERS J C, SCHIPPER J, VELTINK P H, et al. Procedure for in-use calibration of triaxial accelerometers in medical applications[J]. Journal of Applied Behavior Analysis, 1998, 68(1-3): 221-228.
|
| [8] |
SKOG I, HÄNDEL P. Calibration of a MEMS inertial measurement unit[C]//XVII IMEKO World Congress, 2006: 1-6.
|
| [9] |
FROSIO I, PEDERSINI F, BORGHESE N A, et al. Autocalibration of MEMS accelerometers[J]. IEEE Transactions on Instrumentation and Measurement, 2009, 58(6): 2034-2041. doi: 10.1109/TIM.2008.2006137
|
| [10] |
QURESHI U, GOLNARAGHI F. An algorithm for the in-field calibration of a MEMS IMU[J]. IEEE Sensors Journal, 2017, 17(22): 7479-7486. doi: 10.1109/JSEN.2017.2751572
|
| [11] |
SIPOS M. Analyses of triaxial accelerometer calibration algorithms[J]. IEEE Sensors Journal, 2012, 12(5): 1157-1165. doi: 10.1109/JSEN.2011.2167319
|
| [12] |
CAI Q, SONG N, YANG G, et al. Accelerometer calibration with nonlinear scale factor based on multi-position observation[J]. Measurement Science, 2013, 24(10): 105002. doi: 10.1088/0957-0233/24/10/105002
|
| [13] |
戴邵武, 王克红, 戴洪德. 基于PSO算法的加速度计快速标定方法[J]. 电光与控制, 2014, 21(12): 57-60. doi: 10.3969/j.issn.1671-637X.2014.12.013
DAI S W, WANG K H, DAI H D. A rapid calibration method for accelerometer based on PSO algorithm[J]. Elctronics Optics & Control, 2014, 21(12): 57-60(in Chinese). doi: 10.3969/j.issn.1671-637X.2014.12.013
|
| [14] |
PODDAR S, KUMAR A. Scale-free PSO for in-run and infield inertial sensor calibration[J]. Measurement, 2019, 147: 106849. doi: 10.1016/j.measurement.2019.07.077
|
| [15] |
杨管金子, 李建辰, 黄海, 等. 基于遗传算法的加速度计免转台标定方法[J]. 中国惯性技术学报, 2017, 25(1): 119-123.
YANG G J Z, LI J C, HUANG H, et al. Non-turntable calibration method for three-accelerometer based on genetic algorithm[J]. Journal of Chinese Inertial Technology, 2017, 25(1): 119-123(in Chinese).
|
| [16] |
CUI X, LIU C, SHI G, et al. A new calibration method for MEMS accelerometers with genetic algorithm[C]//2017 IEEE International Conference on Real-Time Computing and Robotics (RCAR). Piscataway: IEEE Press, 2017: 240-245.
|
| [17] |
高爽, 张若愚. 基于自适应遗传算法的MEMS加速度计快速标定方法[J]. 北京航空航天大学学报, 2019, 45(10): 1982-1989. doi: 10.13700/j.bh.1001-5965.2019.0040
GAO S, ZHANG R Y. Rapid calibration method of MEMS accelerometer based on adaptive GA[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(10): 1982-1989(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0040
|
| [18] |
WANG D, TAN D, LIU L. Particle swarm optimization algorithm: An overview[J]. Soft Computing, 2018, 22(2): 387-408. doi: 10.1007/s00500-016-2474-6
|
| [19] |
PAN W T. A new fruit fly optimization algorithm: Taking the financial distress model as an example[J]. Knowledge-Based Systems, 2012, 26: 69-74. doi: 10.1016/j.knosys.2011.07.001
|
| [20] |
DAI H, ZHAO G, LU J, et al. Comment and improvement on "A new fruit fly optimization algorithm: Taking the financial distress model as an example"[J]. Knowledge-Based Systems, 2014, 59: 159-160. doi: 10.1016/j.knosys.2014.01.010
|
| [21] |
DAI H, LIU A, LU J, et al. Optimization about the layout of IMUs in large ship based on fruit fly optimization algorithm[J]. Optik, 2015, 126(4): 490-493. doi: 10.1016/j.ijleo.2014.08.037
|
| [22] |
WANG L, XIONG Y, LI S, et al. New fruit fly optimization algorithm with joint search strategies for function optimization problems[J]. Knowledge-Based Systems, 2019, 176: 77-96. doi: 10.1016/j.knosys.2019.03.028
|
| [23] |
赵晓军, 刘成忠, 胡小兵. 基于果蝇优化算法的PID控制器设计与应用[J]. 中南大学学报(自然科学版), 2016, 47(11): 3729-3734.
ZHAO X J, LIU C Z, HU X B. Design and application of PID controller based on fruit fly optimization algorithm[J]. Journal of Central South University (Science and Technology), 2016, 47(11): 3729-3734(in Chinese).
|
| [24] |
JIANG W, WU X, GONG Y, et al. Holt-Winters smoothing enhanced by fruit fly optimization algorithm to forecast monthly electricity consumption[J]. Energy, 2020, 193: 116779. doi: 10.1016/j.energy.2019.116779
|
| [25] |
SHI K, ZHANG X, XIA S. Multiple swarm fruit fly optimization algorithm based path planning method for Multi-UAVs[J]. Applied Sciences, 2020, 10(8): 2822. doi: 10.3390/app10082822
|
| [26] |
PODDAR S, KUMAR V, KUMAR A. A comprehensive overview of inertial sensor calibration techniques[J]. Journal of Dynamic Systems, Measurement, and Control, 2017, 139(1): 011006. doi: 10.1115/1.4034419
|
| [27] |
SHIN E H, EL-SHEIMY N. A new calibration method for strapdown inertial navigation systems[J]. Z. Vermess, 2002, 127: 1-10.
|
| [28] |
FONG W, ONG S, NEE A. Methods for in-field user calibration of an inertial measurement unit without external equipment[J]. Measurement Science and Technology, 2008, 19(8): 085202. doi: 10.1088/0957-0233/19/8/085202
|
| [29] |
ZHANG H, WU Y, WU W, et al. Improved multi-position calibration for inertial measurement units[J]. Measurement Science and Technology 2010, 21(1): 015107. doi: 10.1088/0957-0233/21/1/015107
|
| [30] |
MA J, LI H. Research on Rosenbrock function optimization problem based on improved differential evolution algorithm[J]. Journal of Computer Communications, 2019, 7(11): 107-120. doi: 10.4236/jcc.2019.711008
|

Figures(4) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Sun Pengwei, Wang Shimin, Wang Qi, et al. Optimal trajectory formation and control of human arm point-to-point movement[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(7): 826-829. (in Chinese)





 DownLoad:
DownLoad: