| Citation: | XIAO Zonghao, ZHANG Peng, CHI Wensheng, et al. Hybrid control for UAV swarms based on Agent and cellular automata[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(11): 2344-2359. doi: 10.13700/j.bh.1001-5965.2020.0385(in Chinese)

|
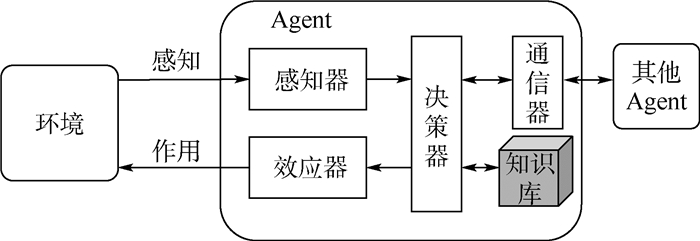
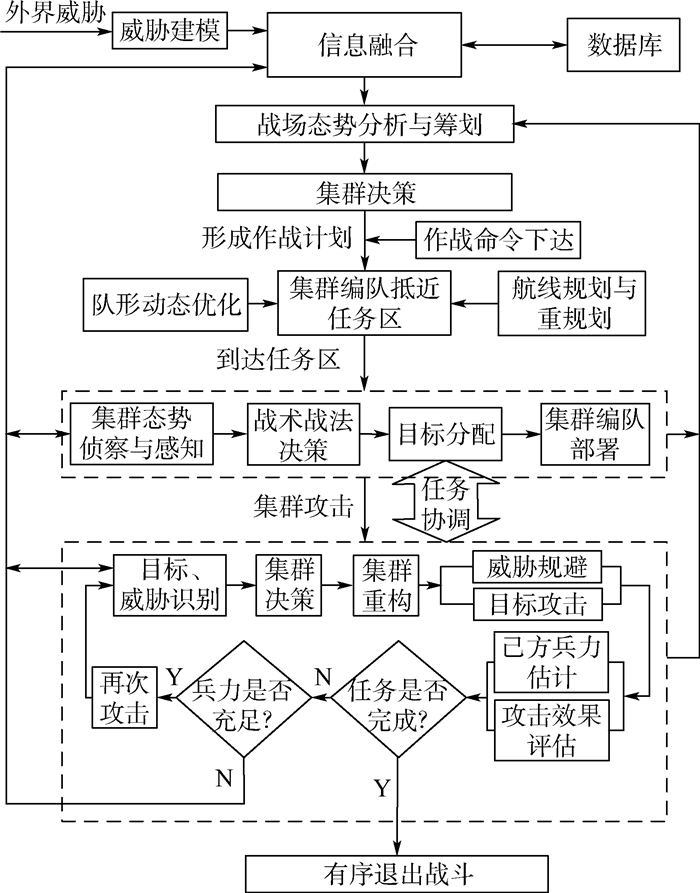
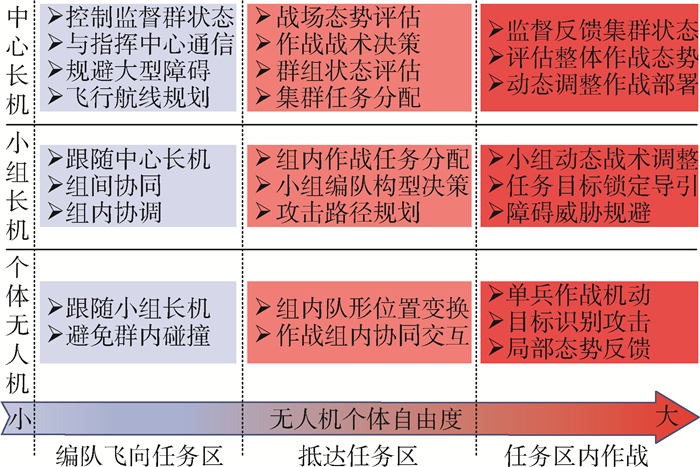
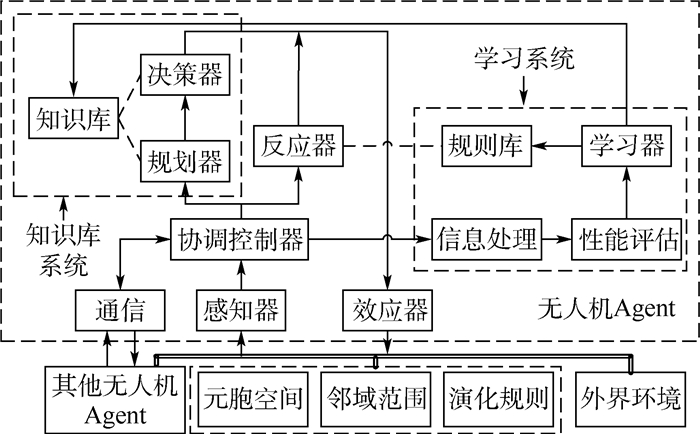
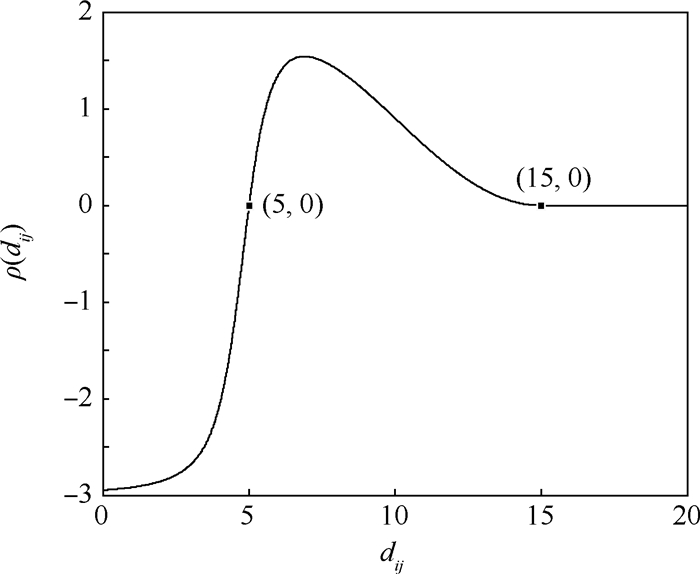
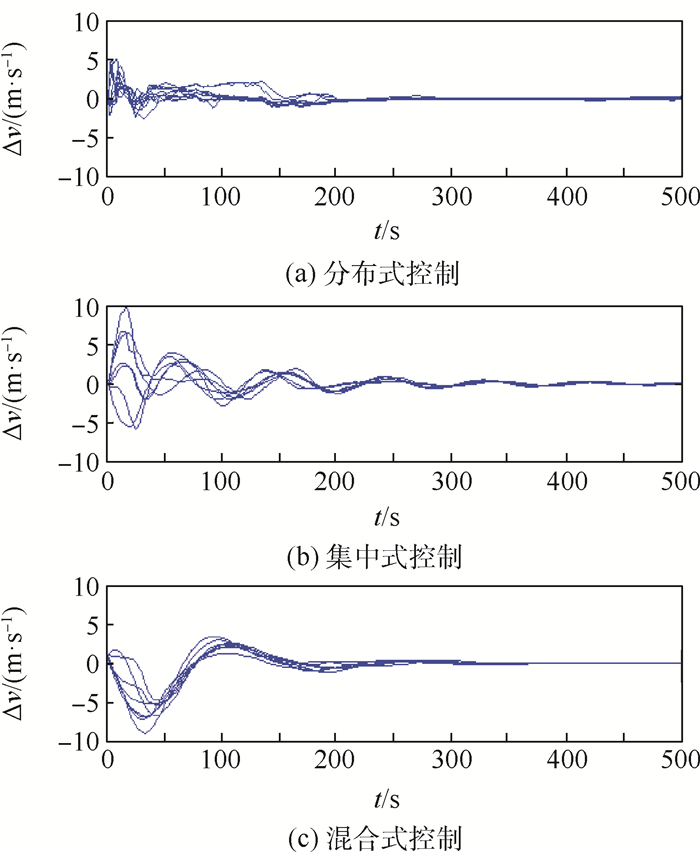
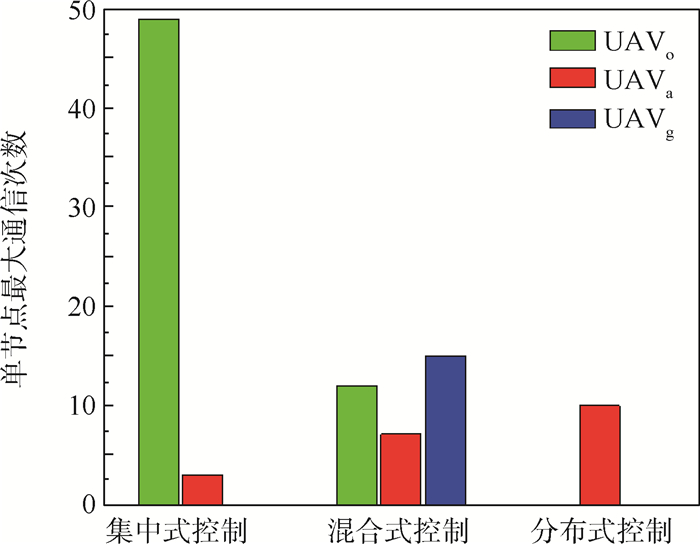
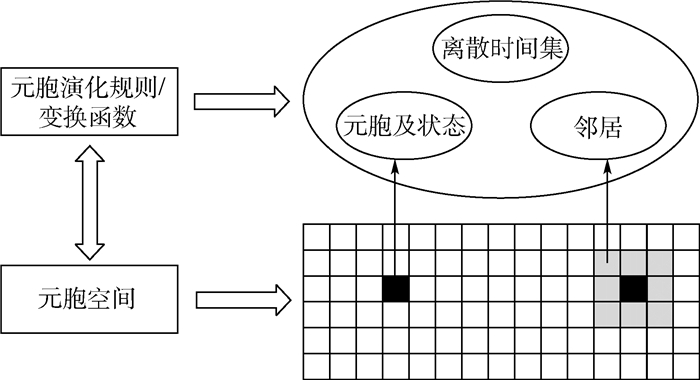
The efficient and orderly swarms control mode is the prerequisite for the swarms to successfully complete the combat mission. Aimed at the problem of UAV swarms control, a hybrid swarms control based on Agent and cellular automata is proposed by combining the centralized and distributed control modes. Based on the analysis of UAV swarms operation flow, the framework of UAV swarms control system, communication topology and swarms control rules are constructed. The swarms' individuals are divided from top to bottom into three levels: center leader, group leader, and individual UAV. The upper level adopts top-down centralized control to the lower level, and the same level adopts bottom-up distributed control. On this basis, using the hierarchy of Agent model and the homogeneity of cellular automata model, a swarms hybrid control model based on Agent and cellular automata is designed to realize the effective combination of the two control modes. The cellular automata model realizes the basic swarms rules of aggregation, separation and uniform speed, and the Agent model realizes the cooperative interaction rules among individuals at different levels. Under the background of formation assembly and maintenance task, three kinds of control: distributed, centralized and hybrid, are compared and simulated. The simulation results show that the swarms based on hybrid control have obvious advantages in formation controllability, following, consistency and reducing communication load, which verifies the effectiveness of the hybrid swarms control method.
| [1] |
DUAN H B, YANG Q, DENG Y M, et al. Unmanned aerial systems coordinate target allocation based on wolf behaviors[J]. Science China Information Sciences, 2019, 62(1): 205-207.
|
| [2] |
FAELDEN G E U, VICERRA R R P, GAN L L A, et al. Implementation of swarm social foraging behavior in unmanned aerial vehicle (UAV) quadrotor swarm[J]. Journal of Advanced Computational Intelligence and Intelligent Informatics, 2018, 21(2): 197-204.
|
| [3] |
郑繁繁, 张立冬, 赵浦媛, 等. 启发式无人机蜂群自组网协议及仿真[J]. 指挥与控制学报, 2020, 6(1): 50-59. doi: 10.3969/j.issn.2096-0204.2020.01.0050
ZHENG F F, ZHANG L D, ZHAO P Y, et al. The protocol and simulation of swarm self-organizing network for heuristic UAV[J]. Journal of Command and Control, 2020, 6(1): 50-59(in Chinese). doi: 10.3969/j.issn.2096-0204.2020.01.0050
|
| [4] |
王祥科, 刘志宏, 丛一睿, 等. 小型固定翼无人机集群综述和未来发展[J]. 航空学报, 2020, 41(4): 20-45.
WANG X K, LIU Z H, CONG Y R, et al. Miniature fixed-wing UAV swarms: Review and outlook[J]. Acta Aerophenica Sinica, 2020, 41(4): 20-45(in Chinese).
|
| [5] |
LIU W, GAO Z J. A distributed flocking control strategy for UAV groups[J]. Computer Communications, 2020, 153: 95-101. doi: 10.1016/j.comcom.2020.01.076
|
| [6] |
FU X W, PAN J, WANG H X, et al. A formation maintenance and reconstruction method of UAV swarm based on distributed control[J]. Aerospace Science and Technology, 2020, 104: 105981. doi: 10.1016/j.ast.2020.105981
|
| [7] |
LIU H, MENG Q Y, PENG F C, et al. Heterogeneous formation control of multiple UAVs with limited-input leader via reinforcement learning[J]. Neurocomputing, 2020, 412: 63-71. doi: 10.1016/j.neucom.2020.06.040
|
| [8] |
ROLDAO V, CUNHA R, CABECINHAS D, et al. A leader-following trajectory generator with application to quadrotor formation flight[J]. Robotics and Autonomous Systems, 2014, 62(10): 1597-1609. doi: 10.1016/j.robot.2014.05.002
|
| [9] |
WILSON D B, GOKTOGAN A H, SUKKARIEH S. Vision-aided guidance and navigation for close formation flight[J]. Journal of Field Robotics, 2016, 33(5): 661-686. doi: 10.1002/rob.21637
|
| [10] |
HUO M Z, DUAN H B, YANG Q, et al. Live-fly experimentation for pigeon-inspired obstacle avoidance of quadrotor unmanned aerial vehicles[J]. Science China Information Sciences, 2019, 62(5): 052201. doi: 10.1007/s11432-018-9576-x
|
| [11] |
霍梦真, 魏晨, 于月平, 等. 基于鸽群智能行为的大规模无人机集群聚类优化算法[J]. 中国科学: 技术科学, 2020, 50(4): 475-482.
HUO M Z, WEI C, YU Y P, et al. A large-scale UAV clustering optimization algorithm based on pigeon swarm intelligent behavior[J]. Scientia Sinica: Technical Science, 2020, 50(4): 475-482(in Chinese).
|
| [12] |
杨之元, 段海滨, 范彦铭. 基于莱维飞行鸽群优化的仿雁群无人机编队控制器设计[J]. 中国科学: 技术科学, 2018, 48(2): 161-169. doi: 10.3969/j.issn.0253-2778.2018.02.011
YANG Z Y, DUAN H B, FAN Y M. Formation controller design based on levi-flight pigeon swarm optimization[J]. Scientia Sinica: Technical Science, 2018, 48(2): 161-169(in Chinese). doi: 10.3969/j.issn.0253-2778.2018.02.011
|
| [13] |
QIU H X, WEI C, DOU R, et al. Fully autonomous flying: From collective motion in bird flocks to unmanned aerial vehicle autonomous swarms[J]. Science China Information Sciences, 2015, 58(12): 211-213. http://www.cnki.com.cn/Article/CJFDTotal-JFXG201512016.htm
|
| [14] |
JIA X, HU L H, FENG F J, et al. Robust H∞ consensus control for linear discrete-time swarm systems with parameter uncertainties and time-varying delays[J]. International Journal of Aerospace Engineering, 2019, 2019: 1-16.
|
| [15] |
ZHEN Z Y, TAO G, XU Y, et al. Multivariable adaptive control based consensus flight control system for UAVs formation[J]. Aerospace Science and Technology, 2019, 93: 105336. doi: 10.1016/j.ast.2019.105336
|
| [16] |
闫党辉, 章卫国, 陈航, 等. 具有时延和干扰约束的多无人机滑模一致性编队控制研究[J]. 西北工业大学学报, 2020, 38(2): 420-426. doi: 10.3969/j.issn.1000-2758.2020.02.024
YAN D H, ZHANG W G, CHEN H, et al. Research on sliding mode consistent formation control of multi-uav with delay and interference constraints[J]. Journal of Northwest University of Technology, 2020, 38(2): 420-426(in Chinese). doi: 10.3969/j.issn.1000-2758.2020.02.024
|
| [17] |
DENNUNZIO A, FORMENTI E, GRINBERG D, et al. Dynamical behavior of additive cellular automata over finite abelian groups[J]. Theoretical Computer Science, 2020, 843: 45-56. doi: 10.1016/j.tcs.2020.06.021
|
| [18] |
JETTO K, TAHIRI Z, BENYOUSSEF A, et al. Cognitive anticipation cellular automata model: An attempt to understand the relation between the traffic states and rear-end collisions[J]. Accident Analysis and Prevention, 2020, 142: 105507. doi: 10.1016/j.aap.2020.105507
|
| [19] |
ZHANG S L, SHEN Y F, ZHAO Z Y. Design and implementation of a three-lane CA traffic flow model on ternary optical computer[J]. Optics Communications, 2020, 470: 125750. doi: 10.1016/j.optcom.2020.125750
|
| [20] |
NAJM A A, IBRAHEEM I K, AZAR A T, et al. Genetic optimization-based consensus control of multi-agent 6-DoF UAV system[J]. Sensors, 2020, 20(12): 3576. doi: 10.3390/s20123576
|
| [21] |
WU G F, WAN K F, GAO X G, et al. Placement of unmanned aerial vehicles as communication relays in two-tiered multi-agent system: Clustering based methods[J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 231-242. doi: 10.23919/JSEE.2020.000001
|
| [22] |
HUANG S N, TEO S H R, LIU W Q, et al. Agent model for multi-UAV control via protocol designs[J]. International Journal of Intelligent Computing and Cybernetics, 2017, 10(4): 412-429. doi: 10.1108/IJICC-02-2017-0010
|
| [23] |
张阳, 王艳正, 司光亚. 集群式电子战无人机的OODA作战环分析与建模[J]. 火力与指挥控制, 2018, 43(8): 31-36. doi: 10.3969/j.issn.1002-0640.2018.08.007
ZHANG Y, WANG Y Z, SI G Y. Analysis and modeling of OODA circle of electronic war fare group UAV[J]. Fire Control & Command Control, 2018, 43(8): 31-36(in Chinese). doi: 10.3969/j.issn.1002-0640.2018.08.007
|
| [24] |
REYNOLDS C W. Flocks, herds and schools: A distributed behavioral model[J]. ACM SIGGRAPH Computer Graphics, 1987, 21(4): 25-34. doi: 10.1145/37402.37406
|
| [25] |
赵学军, 董玉浩, 袁修久, 等. 具有周期性双层优化结构的无人机集群航路规划模型[J]. 科技导报, 2019, 37(13): 53-58.
ZHAO X J, DONG Y H, YUAN X J, et al. UAV cluster route planning model with periodic double-layer optimization structure[J]. Science and Technology Bulletin, 2019, 37(13): 53-58(in Chinese).
|
| [26] |
REN W. Consensus based formation control strategies for multi-vehicle systems[C]//2006 American Control Conference. Piscataway: IEEE Press, 2006: 14-16.
|
| 1. | 潘振华,夏元清,鲍泓,王睿哲,于婷婷. 无人智能集群系统决策与控制研究进展. 中国图象图形学报. 2024(11): 3195-3215 .  | |
| 2. | 费陈,郑晗,赵亮. 无人机集群控制技术研究. 弹箭与制导学报. 2023(03): 45-55 . | |
| 3. | 张旭东,李少波,李传江,张安思,杨磊. 无人机集群综述:技术、挑战与未来. 无线电工程. 2023(07): 1487-1501 . | |
| 4. | 庞强伟,王德石,陈晔,武峰. UAV时变编队控制技术研究综述. 兵器装备工程学报. 2023(10): 191-201 . | |
| 5. | 蔡开泉,赵鹏. 空中交通自主间隔管控技术研究. 南京航空航天大学学报. 2022(04): 688-699 . |

Figures(17) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Jin Hongtao, Jiao Zongxia, Li Chenggong, et al. Modeling and characteristics analysis of redundant direct drive servo actuating system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(09): 1059-1062. (in Chinese)




 DownLoad:
DownLoad: