| Citation: | FENG Hui, HU Sheng, YU Wenzhao, et al. Finite-time line-of-sight guidance law path following control for underactuated intelligent ships[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(3): 394-400. doi: 10.13700/j.bh.1001-5965.2020.0561(in Chinese)

|
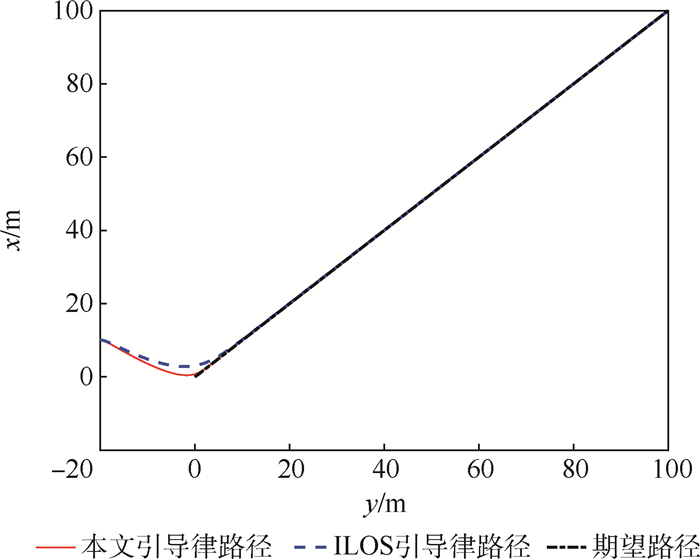
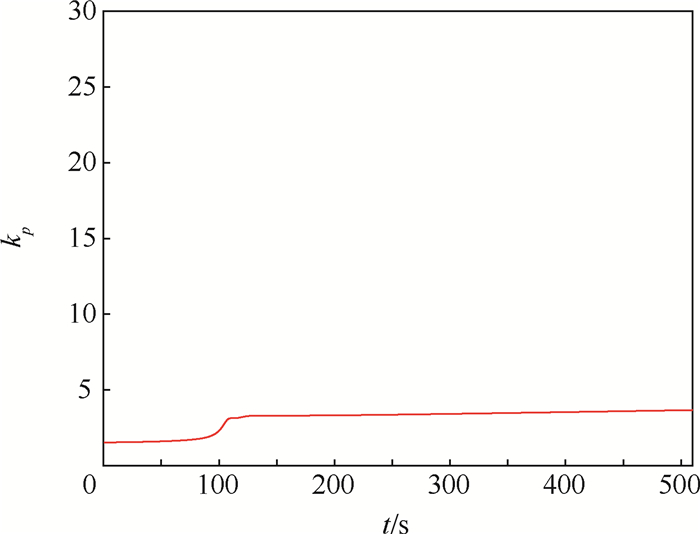
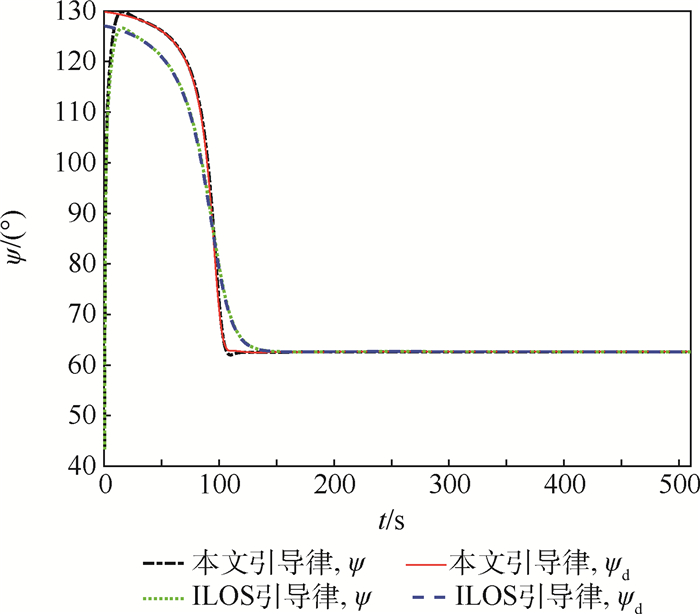
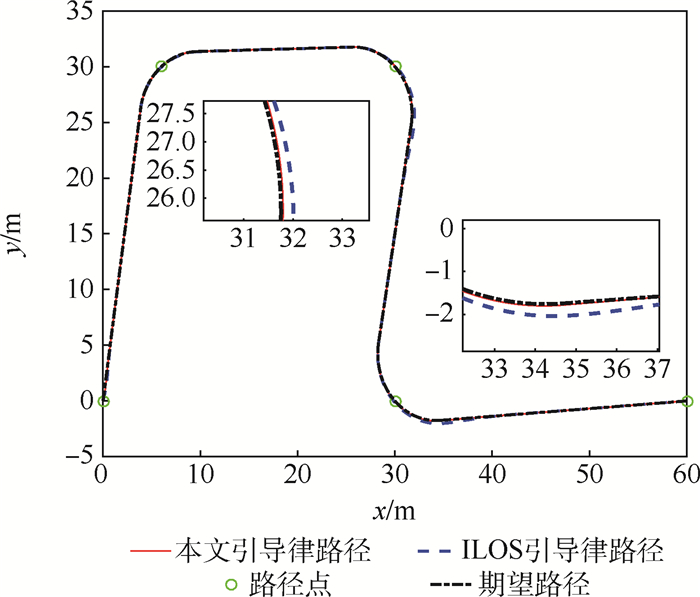
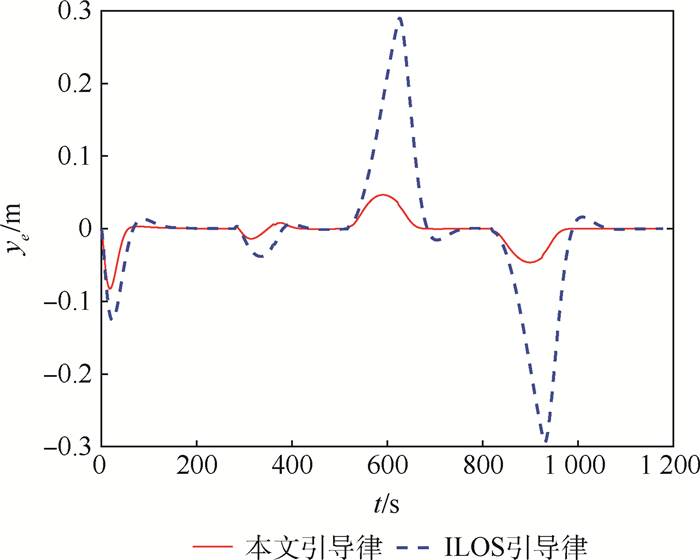
In consideration of the problem that the lateral deviation of the underactuated intelligent ships increases due to the influence of path curvature and environmental disturbance during the path tracking task, the guidance law of intelligent ships is discussed. An adaptive guidance law with finite-time convergence is proposed. Based on the guidance law, the intelligent ships path following control is realized, so that the lateral deviation can converge to zero in finite time in the path following process. Compared with the traditional integral line-of-sight, the control parameters of the method can be adjusted adaptively according to the change of lateral deviation, and the intelligent ships can be guided to follow the desired line or curve path faster. The effectiveness and advancement of the proposed method are verified by simulation and comparison.
| [1] |
中国船级社. 智能船舶规范[S]. 北京: 中国船级社, 2020.
China Classification Society. Rules for intelligent ships[S]. Beijing: China Classification Society, 2020(in Chinese).
|
| [2] |
FOSSEN T I. Handbook of marine craft hydrodynamics and motion control[M]. New York: John Wiley and Sons Ltd, 2011: 241-242.
|
| [3] |
ENCARNAÇÃO P, PASCOAL A, ARCAK M. Path following for autonomous marine craft[J]. IFAC Proceedings Volumes, 2000, 33(21): 117-122. doi: 10.1016/S1474-6670(17)37061-1
|
| [4] |
FOSSEN T I, BREIVIK M, SKJETNE R. Line-of-sight path following of under-actuated marine craft[J]. IFAC Proceedings Volumes, 2003, 36(21): 244-249.
|
| [5] |
HAC A, SIMPSON M D. Estimation of vehicle sideslip angle and yaw rate[C]//Proceeding of Sea World Congress, 2000: 1032-1038.
|
| [6] |
BEVLY D M, SHERIDAN R, GERDES C. Interating INS sensors with GPS velocity measurements for continuous estimations of vehicle sideslip and tire cornering stiffness[C]//Proceeding of American Control Conference, 2001: 25-30.
|
| [7] |
BØRHAUG E, PAVLOV A, PETTERSEN K Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents[C]//Proceeding of 47th IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2008: 4984-4991.
|
| [8] |
LEKKAS A M. Guidance and path-planning systems for autonomous vehicles[D]. Gløshaugen: Norwegian University of Science and Technology, 2014.
|
| [9] |
瞿洋, 徐海祥, 余文曌, 等. 基于ILOS的欠驱船舶循迹控制[J]. 武汉理工大学学报(交通科学与工程版), 2016, 40(5): 834-838.
QU Y, XU H X, YU W Z, et al. Integral line-of-sight guidance for path following of underactuated marine surface vessels[J]. Journal of Wuhan University of Technology(Transportation Science & Engineering), 2016, 40(5): 834-838(in Chinese).
|
| [10] |
LEKKAS A M, FOSSEN T I. Integral LOS path following for curved paths based on a monotone cubic Hermite spline parametrization[J]. IEEE Transaction on Control System Technology, 2014, 22(6): 2287-2301. doi: 10.1109/TCST.2014.2306774
|
| [11] |
陈霄, 刘忠, 张建强, 等. 基于改进积分视线导引策略的欠驱动水面无人艇路径跟踪[J]. 北京航空航天大学学报, 2018, 44(3): 489-499. doi: 10.13700/j.bh.1001-5965.2017.0192
CHEN X, LIU Z, ZHANG J Q, et al. Path following of underactuated USV based on modified integral line-of-sight guidance strategies[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3): 489-499(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0192
|
| [12] |
FOSSEN T I, PETTERSEN K Y, GALEAZZI R. Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces[J]. IEEE Transaction on Control System Technology, 2015, 23(2): 820-827. doi: 10.1109/TCST.2014.2338354
|
| [13] |
FOSSEN T I, LEKKAS A M. Direct and indirect adaptive integral line-of-sight path-following controllers for marine craft exposed to ocean currents[J]. International Journal of Adaptive Control and Signal Processing, 2015, 31(4): 445-463.
|
| [14] |
LIU L, WANG D, PENG Z. ESO-based line-of-sight guidance law for path following of underactuated marine surface vehicles with exact sideslip compensation[J]. IEEE Journal of Oceanic Engineering, 2017, 42(2): 477-487. doi: 10.1109/JOE.2016.2569218
|
| [15] |
BHAT S, BERNSTAIN D S. Lyapunov analysis of finite-time differential equations[C]//Proceeding of American Control Conference, 1995: 1831-1832.
|
| [16] |
WANG N, SUN Z, YIN J, et al. Finite-time observer based guidance and control of underactuated surface vehicles with unknown sideslip angles and disturbances[J]. IEEE Access, 2018, 6: 14059-14070.
|
| [17] |
WANG L, XU C K, CHENG J H. Robust output path-following control of marine surface vessels with finite-time LOS guidance[J]. Journal of Marine Science and Engineering, 2020, 8(4): 275. doi: 10.3390/jmse8040275
|
| [18] |
余亚磊. 无人运输船舶路径跟踪自主智能控制[D]. 大连: 大连海事大学, 2019: 67-69.
YU Y L. Autonomous intelligent control for path following of unmanned surface vehicles[D]. Dalian: Dalian Maritime University, 2019: 67-69(in Chinese).
|
| 1. | 赵勇,丁锐,张静,李吉德. 基于Levy-AVOA优化模糊PID的动力定位船舶循迹控制研究. 舰船科学技术. 2024(06): 73-80 .  | |
| 2. | 杜文芒,曹建国,朱继友. 基于智能控制的船舶电力系统优化研究. 船舶物资与市场. 2024(04): 90-92 . | |
| 3. | 陈玲萍,张振华. 多船并行航行轨迹精准控制算法研究. 舰船科学技术. 2023(12): 128-131 . | |
| 4. | 孟祥飞,张强,胡宴才,张燕,杨仁明. 欠驱动船舶自适应神经网络有限时间跟踪控制. 山东大学学报(工学版). 2022(04): 214-226 . |


Figures(9) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Fu Jian, Lu Hongnian, Ren Huayou, et al. Harden correction based on original projection sinogram for X-CT[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(06): 725-728. (in Chinese)





 DownLoad:
DownLoad: