| Citation: | ZHAO Longze, SHE Haoping, HUANG Liangwei, et al. A general singularity avoidance algorithm for pedestal-controllable space manipulator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(3): 495-503. doi: 10.13700/j.bh.1001-5965.2020.0603(in Chinese)

|
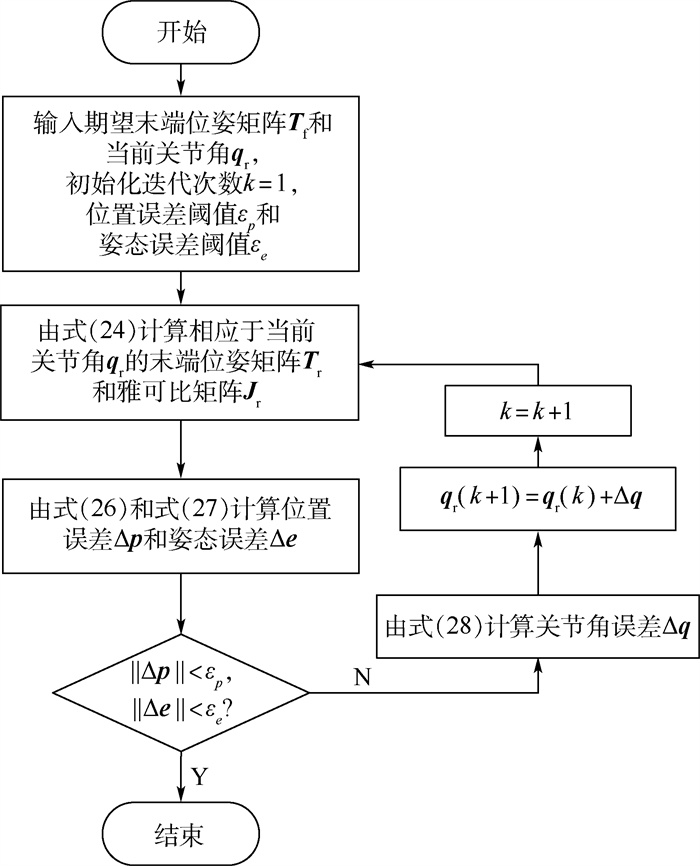
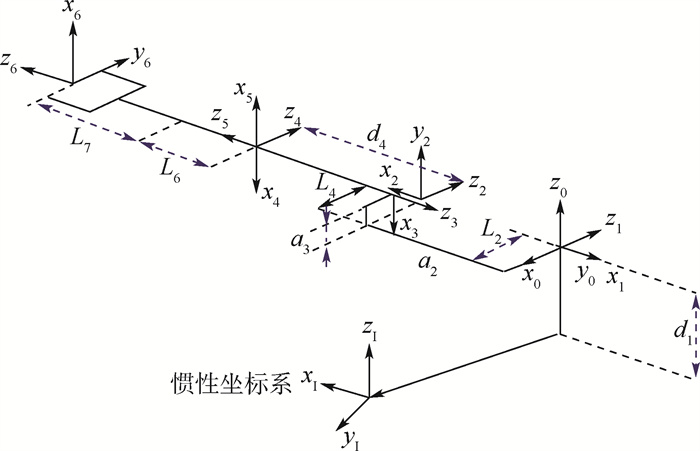
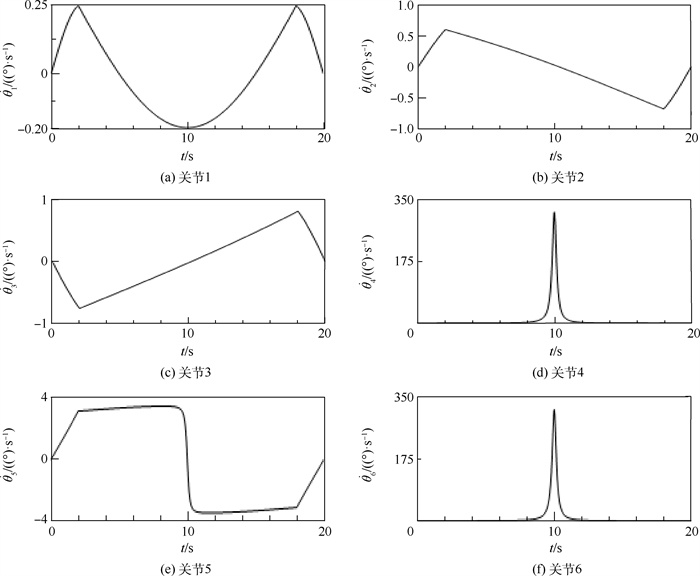
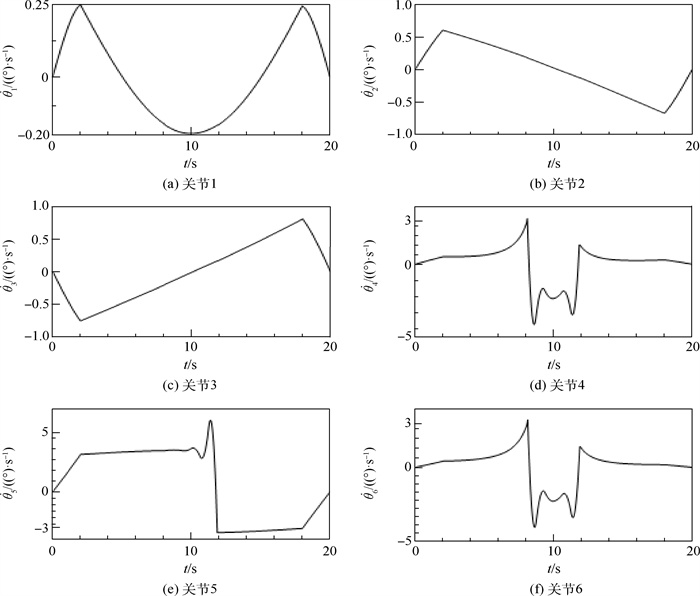
A general singularity avoidance algorithm is proposed to solve the kinematic singularity problem of pedestal-controllable space manipulator in Cartesian path planning. First, we establish Jacobian matrix of the space manipulator by the method of virtual mechanical arm, and determine singular area by judging the relationship between the determinant of Jacobian matrix and angular velocity in real time. Then, Newton-Raphson iterative method is used to solve inverse kinematics of manipulator. Finally, we design a segmental path planning algorithm of "differential term extraction + refitting" for singularity avoidance, until the joint angle breaks away from the singular area. Simulation results show that the proposed algorithm can accomplish the singular avoidance task effectively. The proposed algorithm can be adapted to various degrees of freedom and configurations of mechanical arm. Moreover, it is convenient for users to adjust the relationship between calculation time and tracking accuracy, and has good universality.
| [1] |
UMETANI Y, YOSHIDA K. Resolved motion rate control of space manipulators with generalized Jacobian matrix[J]. IEEE Transactions on Robotics and Automation, 1989, 5(3): 303-314. doi: 10.1109/70.34766
|
| [2] |
KLEIN C A, HUANG C H. Review of pseudoinverse control for use with kinematically redundant manipulators[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1983, SMC-13(2): 245-250. doi: 10.1109/TSMC.1983.6313123
|
| [3] |
NAKAMURA Y, HANAFUSA H. Inverse kinematics solutions with singularity robustness for robot manipulator control[J]. Journal of Dynamic Systems, Measurement, and Control, 1986, 108(3): 163-171. doi: 10.1115/1.3143764
|
| [4] |
WAMPLER C W. Manipulator inverse kinematic solutions based on vector formulations and damped least-squares methods[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1986, 16(1): 93-101. doi: 10.1109/TSMC.1986.289285
|
| [5] |
CHIAVERINI S. Singularity-robust task-priority redundancy resolution for real-time kinematic control of robot manipulators[J]. IEEE Transactions on Robotics and Automation, 1997, 13(3): 398-410. doi: 10.1109/70.585902
|
| [6] |
杨震, 杨文玉, 张晓平. 机器人逆运动学的奇异鲁棒性算法[J]. 中国机械工程, 2014, 25(8): 995-1000. doi: 10.3969/j.issn.1004-132X.2014.08.001
YANG Z, YANG W Y, ZHANG X P. Singularity robustness algorithm for inverse kinematics of robots[J]. China Mechanical Engineering, 2014, 25(8): 995-1000(in Chinese). doi: 10.3969/j.issn.1004-132X.2014.08.001
|
| [7] |
董伯麟, 彭航. 工业机器人逆运动学的奇异回避算法[J]. 机械设计与研究, 2016, 32(2): 35-40.
DONG B L, PENG H. Singularity avoidance algorithm for inverse kinematics of industrial robots[J]. Mechanical Design & Research, 2016, 32(2): 35-40(in Chinese).
|
| [8] |
CHENG F T, HOUR T L, SUN Y Y, et al. Study and resolution of singularities for a 6-DOF PUMA manipulator[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1997, 27(2): 332-343. doi: 10.1109/3477.558842
|
| [9] |
徐文福, 梁斌, 刘宇, 等. 一种新的PUMA类型机器人奇异回避算法[J]. 自动化学报, 2008, 34(6): 670-675.
XU W F, LIANG B, LIU Y, et al. A novel approach to avoid singularities of PUMA-type manipulators[J]. Acta Automatica Sinica, 2008, 34(6): 670-675(in Chinese).
|
| [10] |
崔洪新, 李焕良, 韩金华, 等. 一种六自由度机械手奇异回避算法[J]. 中国机械工程, 2017, 28(11): 1312-1318. doi: 10.3969/j.issn.1004-132X.2017.11.010
CUI H X, LI H L, HAN J H, et al. A novel avoid singularity algorithm for 6-DOF manipulators[J]. China Mechanical Engineering, 2017, 28(11): 1312-1318(in Chinese). doi: 10.3969/j.issn.1004-132X.2017.11.010
|
| [11] |
刘成良, 张凯, 曹其新, 等. 机器人奇异形位分析及协调控制方法[J]. 上海交通大学学报, 2002, 36(8): 1138-1142. doi: 10.3321/j.issn:1006-2467.2002.08.019
LIU C L, ZHANG K, CAO Q X, et al. Singular configuration analysis and coordinate control of robot[J]. Journal of Shanghai Jiao Tong University, 2002, 36(8): 1138-1142(in Chinese). doi: 10.3321/j.issn:1006-2467.2002.08.019
|
| [12] |
CHOI H B, LEE S, LEE J. Minimum infinity-norm joint velocity solutions for singularity-robust inverse kinematics[J]. International Journal of Precision Engineering and Manufacturing, 2011, 12(3): 469-474. doi: 10.1007/s12541-011-0060-5
|
| [13] |
吴戈, 张国良, 羊帆, 等. 一种改进阻尼倒数的空间机器人避奇异算法[J]. 宇航学报, 2016, 37(3): 325-333. doi: 10.3873/j.issn.1000-1328.2016.03.011
WU G, ZHANG G L, YANG F, et al. A singularity avoidance algorithm based on improved damped reciprocal for space robot[J]. Journal of Astronautics, 2016, 37(3): 325-333(in Chinese). doi: 10.3873/j.issn.1000-1328.2016.03.011
|
| [14] |
QIU C W, CAO Q X, MIAO S H. An on-line task modification method for singularity avoidance of robot manipulators[J]. Robotica, 2009, 27(4): 539-546. doi: 10.1017/S026357470800492X
|
| [15] |
NANOS K, PAPADOPOULOS E. On cartesian motions with singularities avoidance for free-floating space robots[C]//2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2012: 5398-5403.
|
| [16] |
NANOS K, PAPADOPOULOS E. Avoiding dynamic singularities in Cartesian motions of free-floating manipulators[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 2305-2318. doi: 10.1109/TAES.2015.140343
|
| [17] |
PAPADOPOULOS E, DUBOWSKY S. On the nature of control algorithms for free-floating space manipulators[J]. IEEE Transactions on Robotics and Automation, 1991, 7(6): 750-758. doi: 10.1109/70.105384
|
| [18] |
VAFA Z, DUBOWSKY S. The kinematics and dynamics of space manipulators: The virtual manipulator approach[J]. The International Journal of Robotics Research, 1990, 9(4): 3-21. doi: 10.1177/027836499000900401
|
| [19] |
梁斌, 徐文福. 空间机器人: 建模、规划与控制[M]. 北京: 清华大学出版社, 2017: 81-84, 121-123.
LIANG B, XU W F. Space robot: Modeling, planning and control[M]. Beijing: Tsinghua University Press, 2017: 81-84, 121-123(in Chinese).
|
| [20] |
GOLUB G H, REINSCH C. Singular value decomposition and least squares[M]//WILKINSON J H, REINSCH C. Linear algebra. Berlin: Springer, 1971: 134-151.
|
| [21] |
BOYD J P. Trouble with gegenbauer reconstruction for defeating Gibbs' phenomenon: Runge phenomenon in the diagonal limit of Gegenbauer polynomial approximations[J]. Journal of Computational Physics, 2005, 204(1): 253-264. doi: 10.1016/j.jcp.2004.10.008
|

Figures(8) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Li Xin, Shen Shituan, Lu Huiet al. Algorithms of tasks scheduling in parallel test based on graph coloring theory[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(09): 1068-1071. (in Chinese)





 DownLoad:
DownLoad: