| Citation: | XU Yaru, LI Kehong, LIU Jia, et al. Constraint violation suppression for dynamics modeling of lower limb rehabilitation robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(4): 609-619. doi: 10.13700/j.bh.1001-5965.2020.0628(in Chinese)

|
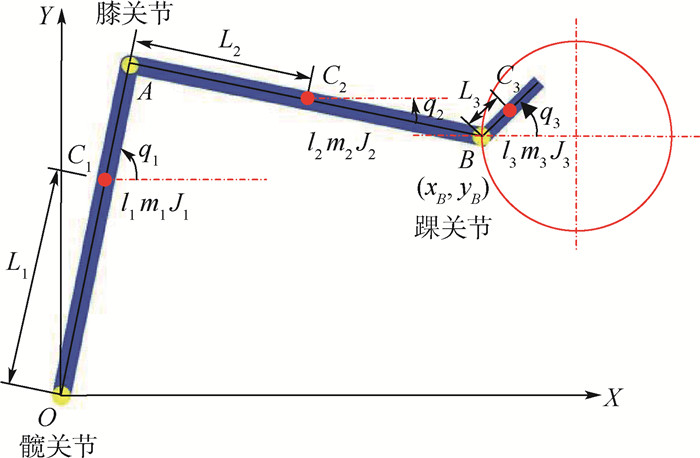
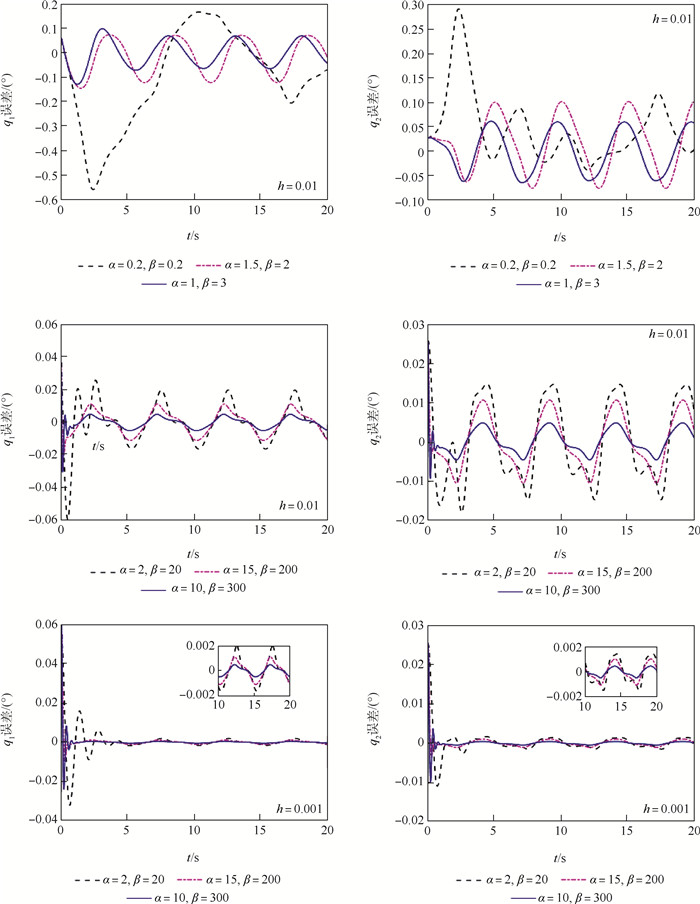
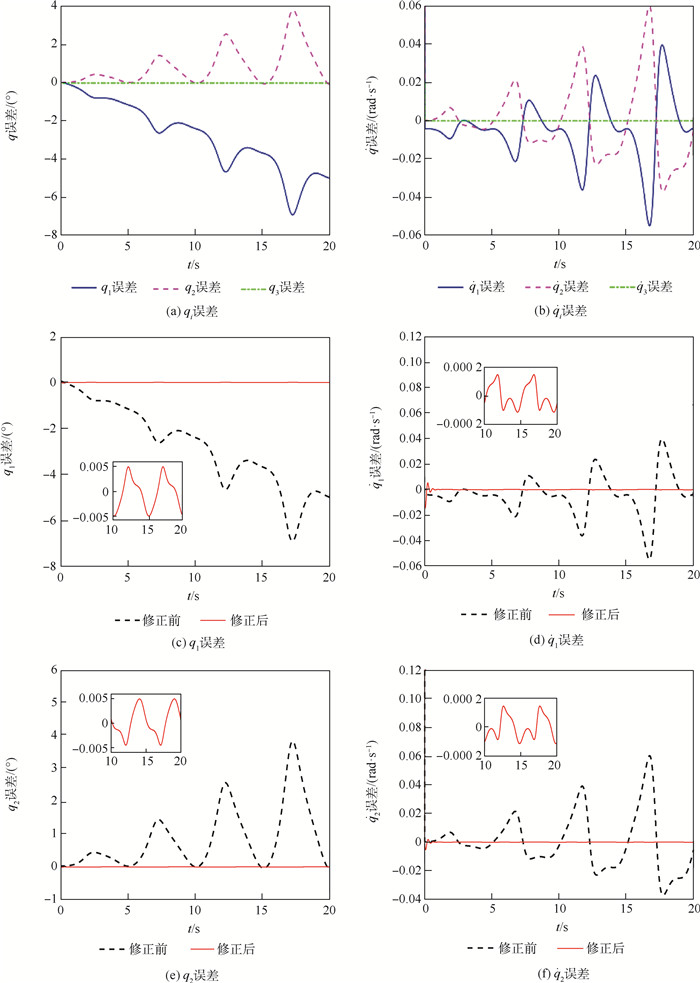
The U-K theory provides a new concept for obtaining the explicit dynamic equation of constraint multibody system. However, one consequence of the numerical approximation and truncation error is the constraint violation of the dynamic equation at the position and velocity level. Baumgarte's constraint violation stability methods (BSM) provide a stable dynamic equation by constraint modification. Nevertheless, the selection of Baumgarte parameters usually involve a trial-and-error process, which may result in the failure of simulation results. Consequently, the Baumgarte parameters selection problem is studied by using the classical fourth-order Runge-Kutta method, and the explicit dynamic equation of robot system based on the modified U-K theory by BSM is established. Furthermore, the lower limb rehabilitation robot is taken as the research object for simulation analysis. The results show that the constraint violation can be effectively suppressed. The joint angle errors are controlled within the range of -5×10-3(°)-5×10-3(°), the joint angular velocity errors are controlled within the range of -2×10-4 rad/s-2×10-4 rad/s, and the operation trajectory of the robot end-effector can be well close to the predetermined target of the system.
| [1] |
UDWADIA F E, KALABA R E. Analytical dynamics: A new approach[M]. Cambridge: Cambridge University Press, 2007.
|
| [2] |
LIU J, LIU R. Dynamic modeling of dual-arm cooperating manipulators based on Udwadia-Kalaba equation[J]. Advances in Mechanical Engineering, 2016, 8(7): 1-10.
|
| [3] |
HUANG K, SHAO K, ZHEN S C, et al. A novel approach for modeling and tracking control of a passive-wheel snake robot[J]. Advances in Mechanical Engineering, 2017, 9(3): 1-15.
|
| [4] |
LYU G Z, LIU R. Determination of stability correction parameters for dynamic equations of constrained multibody systems[J]. Mathematical Problems in Engineering, 2018, 2018: 1-10.
|
| [5] |
SUN H, ZHAO H, HUANG K, et al. A new approach for vehicle lateral velocity and yaw rate control with uncertainty[J]. Asian Journal of Control, 2018, 20(1): 216-227. doi: 10.1002/asjc.1531
|
| [6] |
ZHAO X M, CHEN Y H, ZHAO H, et al. Udwadia-Kalaba equation for constrained mechanical systems: Formulation and applications[J]. Chinese Journal of Mechanical Engineering, 2018, 31(6): 1-14.
|
| [7] |
PAPPALARDO C M, GUIDA D. On the dynamics and control of underactuated nonholonomic mechanical systems and applications to mobile robots[J]. Archive of Applied Mechanics, 2019, 89(4): 669-698. doi: 10.1007/s00419-018-1491-6
|
| [8] |
BLAJER W. Elimination of constraint violation and accuracy aspects in numerical simulation of multibody systems[J]. Multibody System Dynamics, 2002, 7(3): 265-284. doi: 10.1023/A:1015285428885
|
| [9] |
BRAUN D J, GOLDFARB M. Eliminating constraint drift in the numerical simulation of constrained dynamical systems[J]. Computer Methods in Applied Mechanics and Engineering, 2009, 198(37-40): 3151-3160. doi: 10.1016/j.cma.2009.05.013
|
| [10] |
BAUMGARTE J. Stabilization of constraints and integrals of motion in dynamical systems[J]. Computer Methods in Applied Mechanics and Engineering, 1972, 1(1): 1-16. doi: 10.1016/0045-7825(72)90018-7
|
| [11] |
LIN S T, CHEN M W. A PID type constraint stabilization method for numerical integration of multibody systems[J]. Journal of Computational and Nonlinear Dynamics, 2011, 6(4): 044501. doi: 10.1115/1.4002688
|
| [12] |
ZHANG X C, ZHANG X M, CHEN Z. Dynamic analysis of a 3-RRR parallel mechanism with multiple clearance joints[J]. Mechanism and Machine Theory, 2014, 78(78): 105-115.
|
| [13] |
MARQUES F, SOUTO A P, FLORES P. On the constraints violation in forward dynamics of multibody systems[J]. Multibody System Dynamics, 2016, 39: 385-419.
|
| [14] |
LIANG D, SONG Y M, SUN T. Nonlinear dynamic modeling and performance analysis of a redundantly actuated parallel manipulator with multiple actuation modes based on FMD theory[J]. Nonlinear Dynamics, 2017, 89(1): 391-428. doi: 10.1007/s11071-017-3461-x
|
| [15] |
GUO X, ZHANG D G, LI L, et al. Application of the two-loop procedure in multibody dynamics with contact and constraint[J]. Journal of Sound and Vibration, 2018, 427: 15-27. doi: 10.1016/j.jsv.2018.04.020
|
| [16] |
FLORES P, MACHADO M, SEABRA E, et al. A parametric study on the Baumgarte stabilization method for forward dynamics of constrained multibody systems[J]. Journal of Computational and Nonlinear Dynamics, 2011, 6(1): 1-9.
|
| [17] |
黎健玲. 数值分析与实验[M]. 北京: 科学出版社, 2012: 194-196.
LI J L. Numerical analysis and experiments[M]. Beijing: Science Press, 2012: 194-196(in Chinese).
|
| [18] |
LIN S T, HUANG J N. Stabilization of Baumgarte's method using the Runge-Kutta approach[J]. Journal of Mechanical Design, 2002, 124(4): 633-641. doi: 10.1115/1.1519277
|
| [19] |
OGATA K. Discrete-time control systems[M]. Englewood Cliffs: Prentice-Hall, 1994.
|
| [20] |
SHENOY P, MILLER K J, CRAWFORD B, et al. Online electromyographic control of a robotic prosthesis[J]. IEEE Transactions on Biomedical Engineering, 2008, 55(3): 1128-1135. doi: 10.1109/TBME.2007.909536
|


Figures(6) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Li Xin, Shen Shituan, Lu Huiet al. Algorithms of tasks scheduling in parallel test based on graph coloring theory[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(09): 1068-1071. (in Chinese)






 DownLoad:
DownLoad: