| Citation: | SHAO Xin, JI Li, ZOU Huaiwu, et al. A parameter calibration method for manipulators based on laser displacement measurement[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2281-2288. doi: 10.13700/j.bh.1001-5965.2021.0093(in Chinese)

|
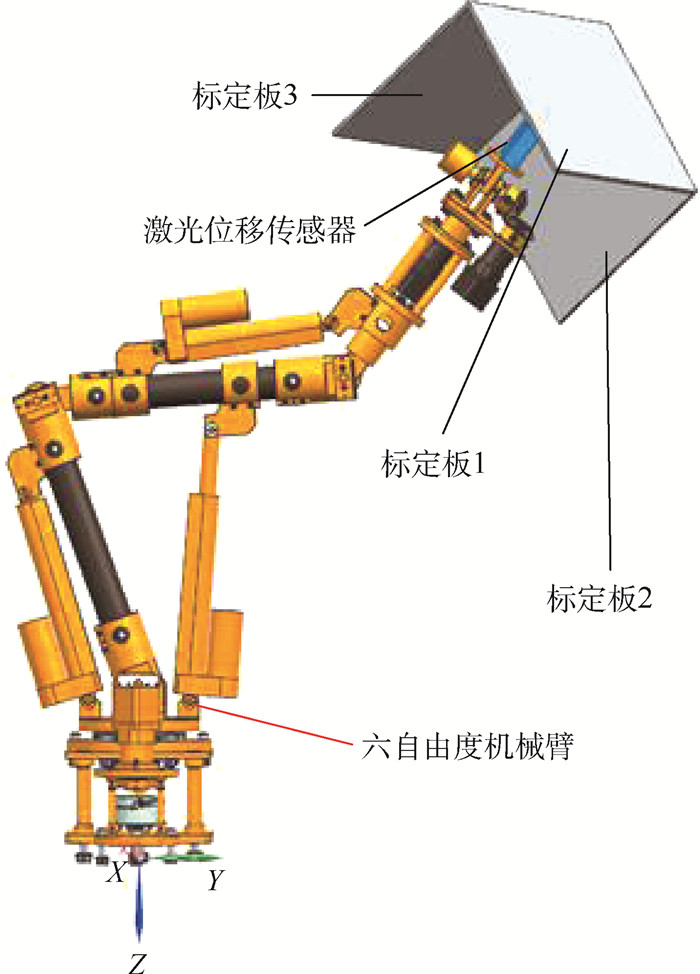
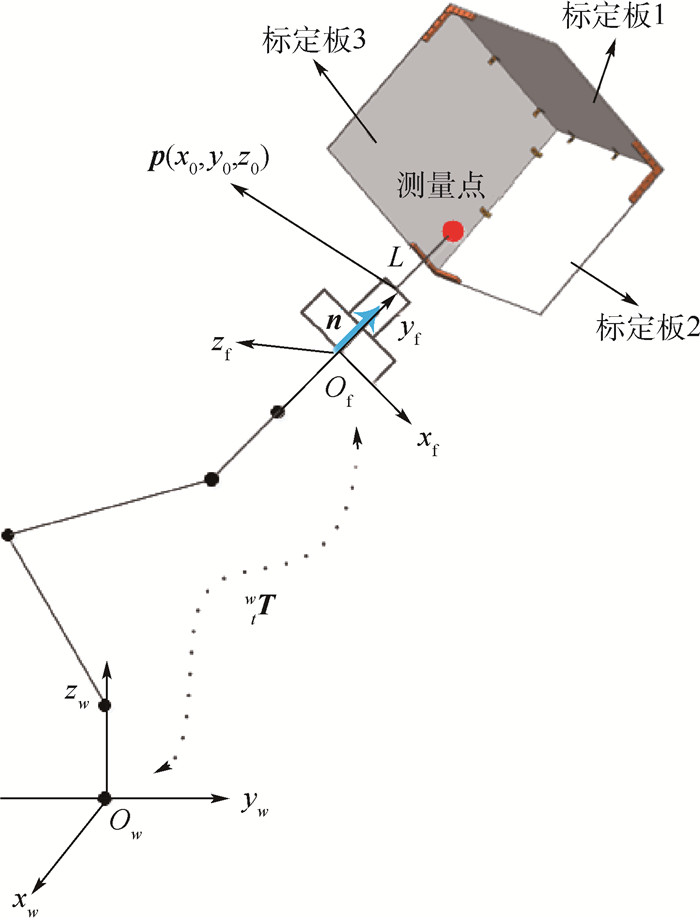
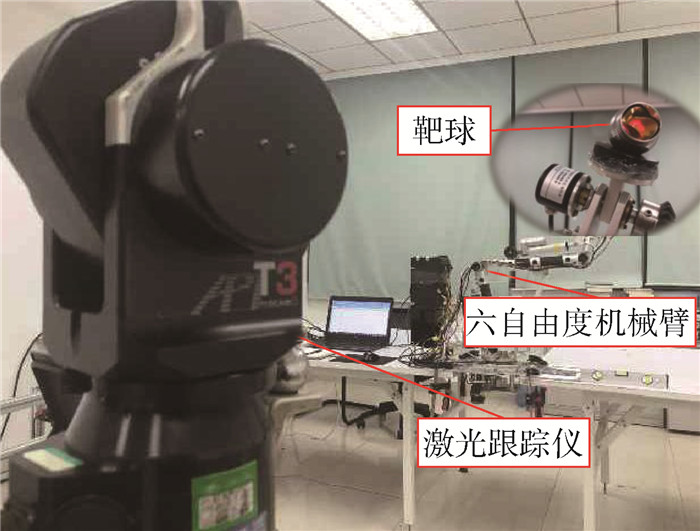
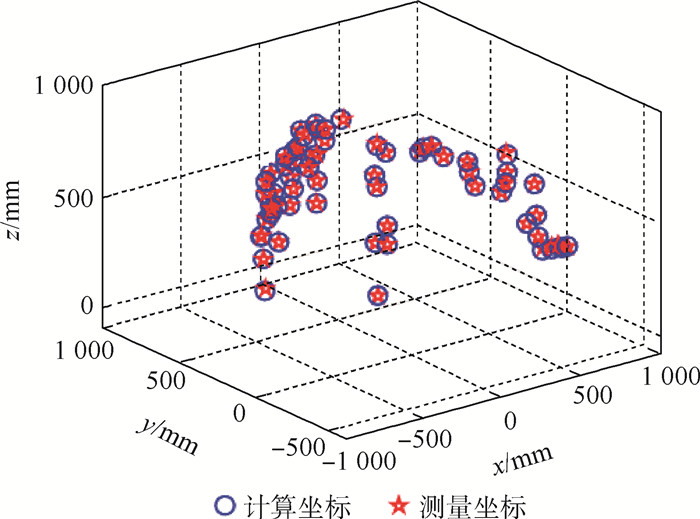
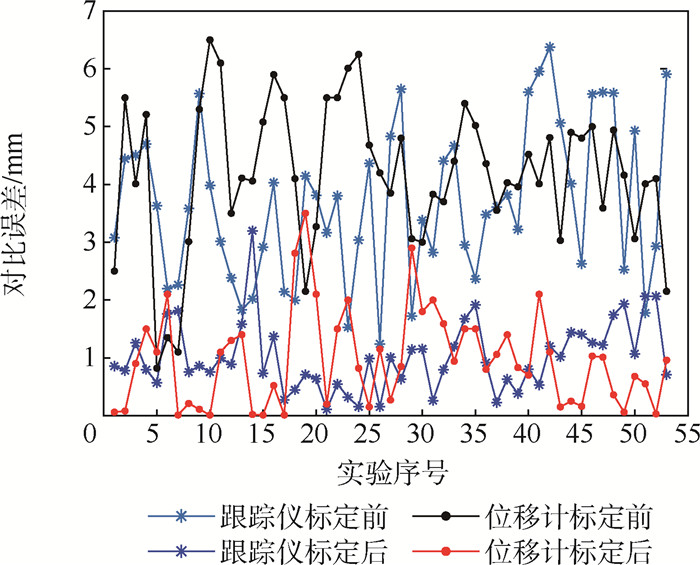
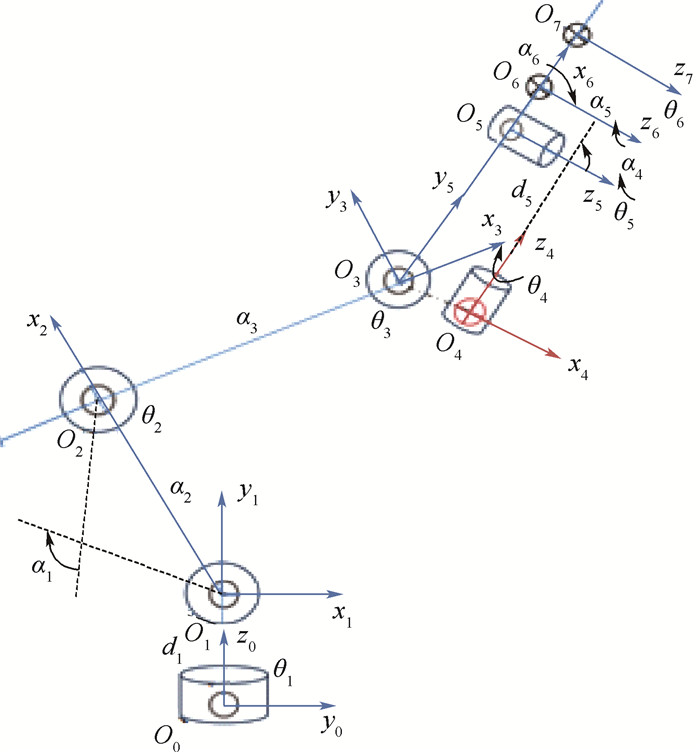
The traditional method of robot parameter target usually requires an expensive equipment, and the technical realization cost is high, a novel low-cost calibration method for manipulators is proposed, which utilizes a laser displacement sensor installed on the end of the manipulator to measure the relative position of the manipulator end with respect to an external cubic reference. A kinematic parameter calibration is designed for a 6 degree of freedom manipulator. Based on single-dimensional measurements, the error function is constructed with combined consideration of plane flatness and plane angles, and further minimized with a nonlinear optimization method to obtain the final calibration results. The proposed method is testified on an experimental system and compared with the calibration by a laser tracker. Results show that this method has similar calibration accuracy to the methods using expensive external measurement devices and provides a handy and cheap solution to manipulator calibration.

| [1] |
高涵, 张明路, 张小俊, 等. 基于最优测量结构选择的机械臂参数标定[J]. 仪器仪表学报, 2018, 39(9): 1-9. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201809001.htm
GAO H, ZHANG M L, ZHANG X J, et al. Manipulator parameter calibration based on optimal measurement structure selection[J]. Chinese Journal of Scientific Instrument, 2018, 39(9): 1-9(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201809001.htm
|
| [2] |
GATTI G, DANIELI G. A practical approach to compensate for geometric errors in measuring arms: Application to a six-degree-of-freedom kinematic struct-ure[J]. Measurement Science and Technology, 2007, 19(1): 015107.
|
| [3] |
陈启军, 周自强, 刘成菊, 等. 基于视觉的六自由度机械臂运动学参数辨识[J]. 同济大学学报(自然科学版), 2020, 48(7): 1023-1029. https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ202007012.htm
CHEN Q J, ZHOU Z Q, LIU C J, et al. Kinematics parameter identification of six-degree-of-freedom manipulator based on vision[J]. Journal of Tongji University (Natural Science Edition), 2020, 48(7): 1023-1029(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-TJDZ202007012.htm
|
| [4] |
谭月胜, 孙汉旭, 贾庆轩, 等. 基于旋量理论及距离误差的机械臂标定新方法[J]. 北京航空航天大学学报, 2006, 32(9): 1104-1108. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK200609024.htm
TAN Y S, SUN H X, JIA Q X, et al. New manipulator calibration method based on screw theory and distance error[J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(9): 1104-1108(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK200609024.htm
|
| [5] |
HE J, DING Q, GAO F, et al. Kinematic calibration methodology of hybrid manipulator containing parallel topology with main limb[J]. Measurement, 2019, 152: 107334.
|
| [6] |
张铁, 戴孝亮, 杜亮. 基于距离测量的机器人误差标定及参数选定[J]. 北京航空航天大学学报, 2014, 40(5): 585-590. https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201405002.htm
ZHANG T, DAI X L, DU L. Robot error calibration based on distance measurement with parameter selection[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(5): 585-590(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJHK201405002.htm
|
| [7] |
HE S, MA L, YAN C, et al. Multiple location constraints based industrial robot kinematic parameter calibration and accuracy assessment[J]. International Journal of Advanced Manufacturing Technology, 2019, 102(5): 1037-1050.
|
| [8] |
DU G L, ZHANG P. IMU-based online kinematic calibration of robot manipulator[J]. The Scientific World Journal, 2013, 2013: 139738.
|
| [9] |
陈宵燕, 张秋菊, 孙沂琳. 串联机器人多模式标定与刚柔耦合误差补偿方法研究[J]. 农业机械学报, 2019, 50(3): 396-403. https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201903045.htm
CHEN X Y, ZHANG Q J, SUN Y L. Multi-mode calibration and rigid-flexible coupling error compensation method of serial robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3): 396-403(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NYJX201903045.htm
|
| [10] |
朱齐丹, 谢心如, 夏桂华, 等. 基于光轴约束的机械臂运动学标定方法[J]. 哈尔滨工程大学学报, 2019, 40(3): 433-439. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201903001.htm
ZHU Q D, XIE X R, XIA G H, et al. Kinematics calibration method of mechanical arm based on optical axis constraint[J]. Journal of Harbin Engineering University, 2019, 40(3): 433-439(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201903001.htm
|
| [11] |
YANG P, GUO Z, KONG Y. Plane kinematic calibration method for industrial robot based on dynamic measurement of double ball bar[J]. Precision Engineering, 2020, 62: 265-272.
|
| [12] |
李永泉, 王皓辰, 张阳, 等. 一种基于手眼视觉的并联机器人标定方法[J]. 中国机械工程, 2020, 31(6): 722-730. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX202006014.htm
LI Y Q, WANG H C, ZHANG Y, et al. A calibration method of parallel robot based on hand eye vision[J]. China Mechanical Engineering, 2020, 31(6): 722-730(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX202006014.htm
|
| [13] |
PARK I W, LEE B J, CHO S H, et al. Laser-based kinematic calibration of robot manipulator using differential kinematics[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(6): 1059-1067.
|
| [14] |
JOUBAIR A, BONEV I A. Kinematic calibration of a six-axis serial robot using distance and sphere constraints[J]. International Journal of Advanced Manufacturing Technology, 2015, 77(1-4): 515-523.
|
| [15] |
JOUBAIR A, BONEV I A. Non-kinematic calibration of a six-axis serial robot using planar constraints[J]. Precision Engineering, 2015, 40(1): 325-333.
|
| [16] |
吴孟桦, 胡晓兵, 赵清祥, 等. 基于双结构光视觉的机器人运动学参数标定方法[J]. 组合机床与自动化加工技术, 2020(6): 37-40. https://www.cnki.com.cn/Article/CJFDTOTAL-ZHJC202006009.htm
WU M H, HU X B, ZHAO Q X, et al. Robot kinematics parameter calibration method based on dual structured light vision[J]. Modular Machine Tool and Automatic Manufacturing Technology, 2020(6): 37-40(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZHJC202006009.htm
|
| [17] |
SLOCUM K, HAYES M J D, LEITNER M, et al. Kinematic calibration of six-axis robots[C]//Proceedings of the CSME Forum 2002, 2002: 149-152.
|
| [18] |
HADGE H, BIDAUD P, JARDIN N. Practical consideration on the identification of the kinematic parameters of the Staubli TX90 robot[C]//13th World Congress in Mechanism and Machine Science, 2011: 43.
|
| [19] |
杨源, 曹彤, 刘达. 一种利用标定板的机械臂DH参数标定方法[J]. 机械传动, 2017, 41(6): 187-190. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201706035.htm
YANG Y, CAO T, LIU D. A DH parameter calibration method of a manipulator using a calibration plate[J]. Mechanical Transmission, 2017, 41(6): 187-190(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201706035.htm
|
| [20] |
COLSON J C, PERREIRA N D. Kinematic arrangements used in industrial robots[C]//Proceedings of the 13th International Symposium on Industrial Robots, 1983: 540-544.
|
| [21] |
UGRAY Z, LASDON L, PLUMMER J, et al. Scatter search and local NLP solvers: A multistart framework for global optimization[J]. Informs Journal on Computing, 2007, 19(3): 328-340.
|
| [22] |
任永杰, 邾继贵, 杨学友, 等. 利用激光跟踪仪对机器人进行标定的方法[J]. 机械工程学报, 2007, 43(9): 195-200. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200709040.htm
REN Y J, CHU J G, YANG X Y, et al. Method of calibrating robot using laser tracker[J]. Chinese Journal of Mechanical Engineering, 2007, 43(9): 195-200(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200709040.htm
|
| [23] |
董慧颖, 李文广. 一种基于平面精度的机器人标定方法及仿真[J]. 中国机械工程, 2011, 22(17): 2039-2042. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201117005.htm
DONG H Y, LI W G. A robot calibration method and simulation based on plane accuracy[J]. China Mechanical Engineering, 2011, 22(17): 2039-2042(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGJX201117005.htm
|
Figures(9) / Tables(5)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: