| Citation: | CHI Shengkai, XIE Yongfang, CHEN Xiaofang, et al. Obstacle avoidance method of mobile robot based on obstacle cost potential field[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2289-2303. doi: 10.13700/j.bh.1001-5965.2021.0095(in Chinese)

|
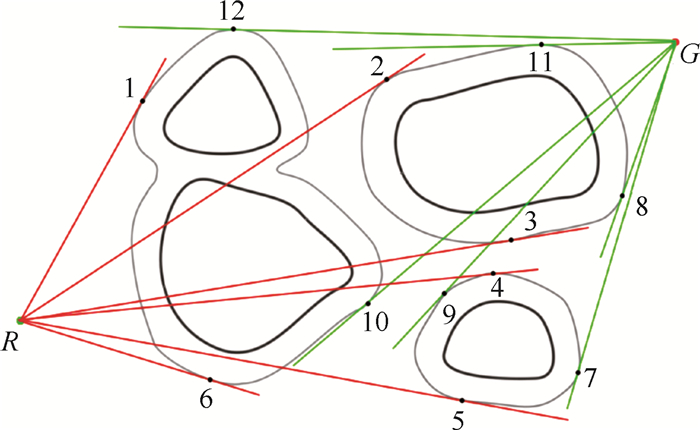
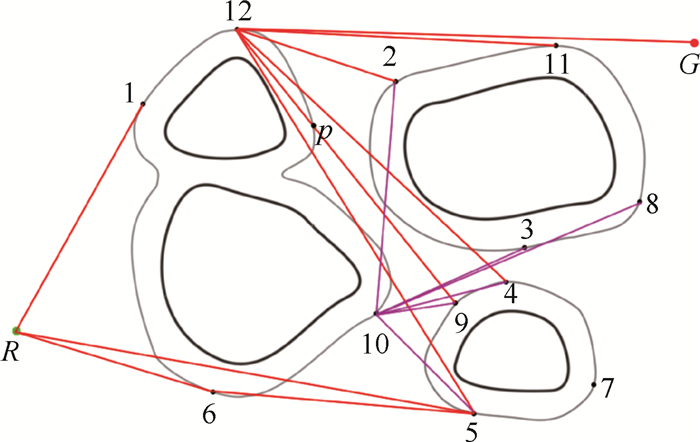
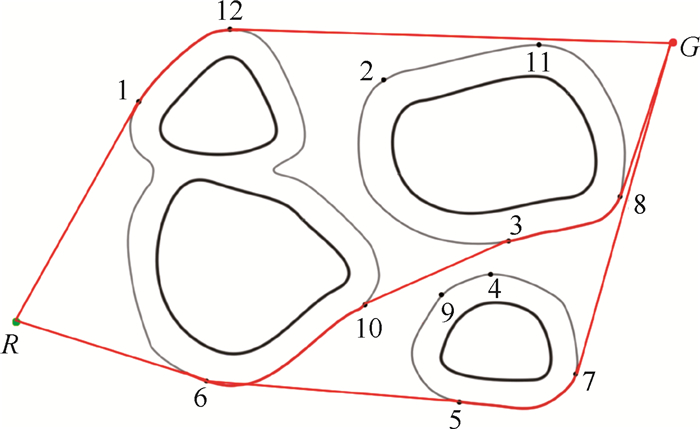
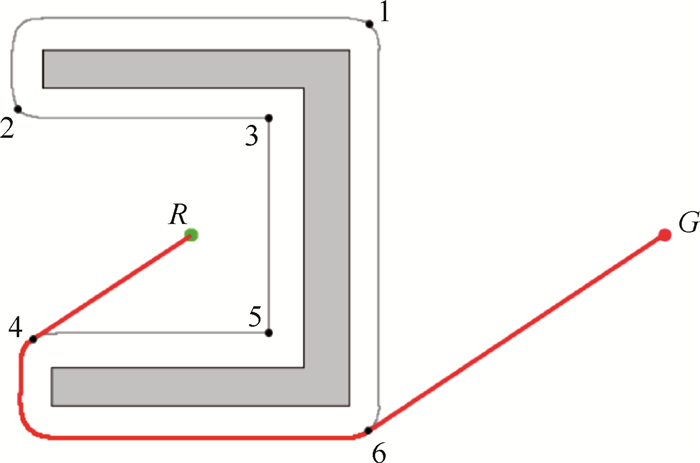
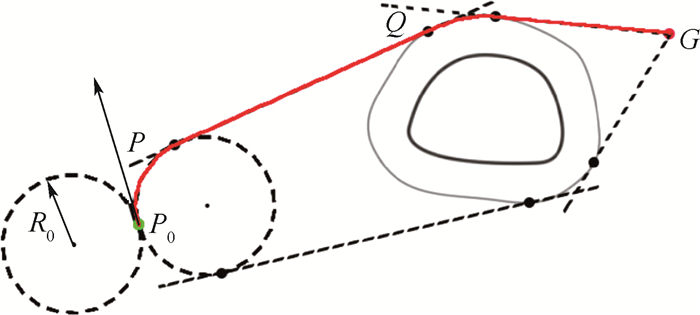
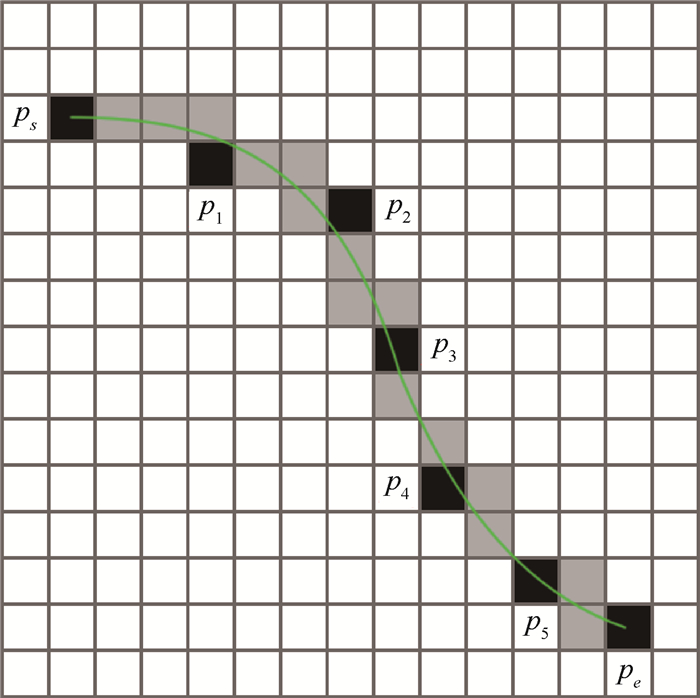
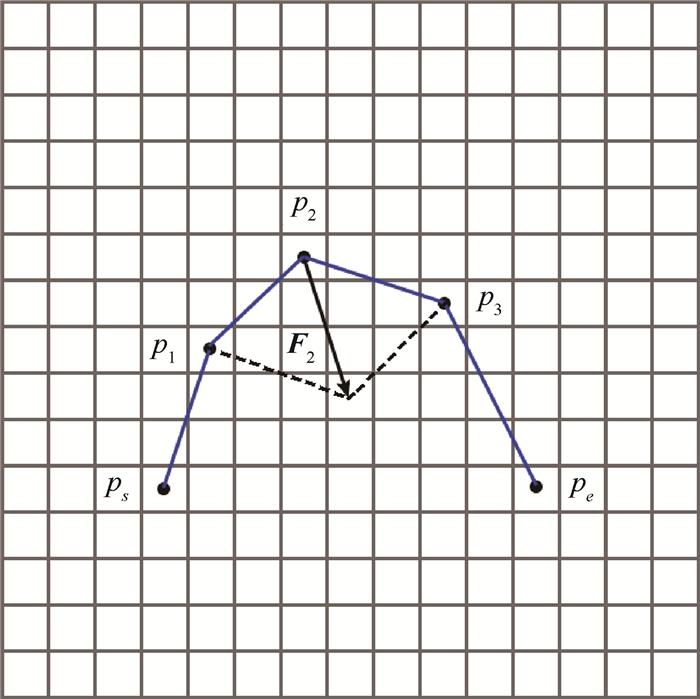
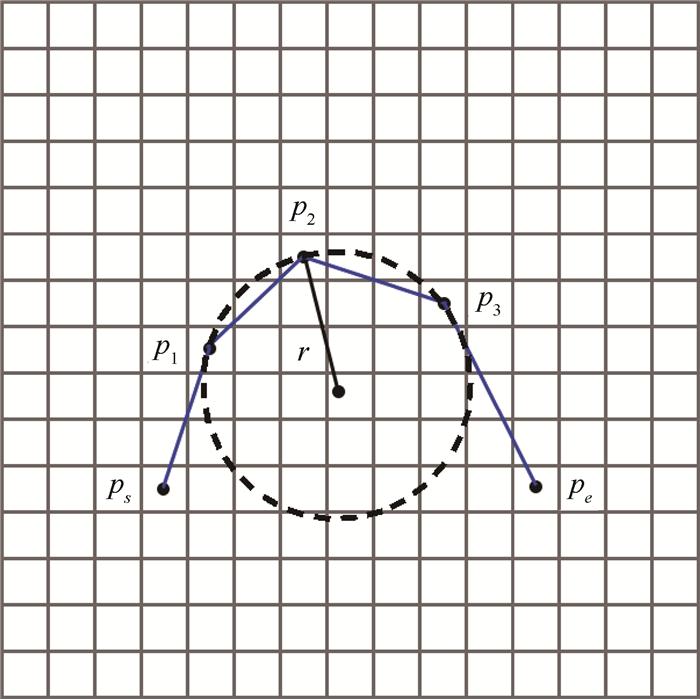
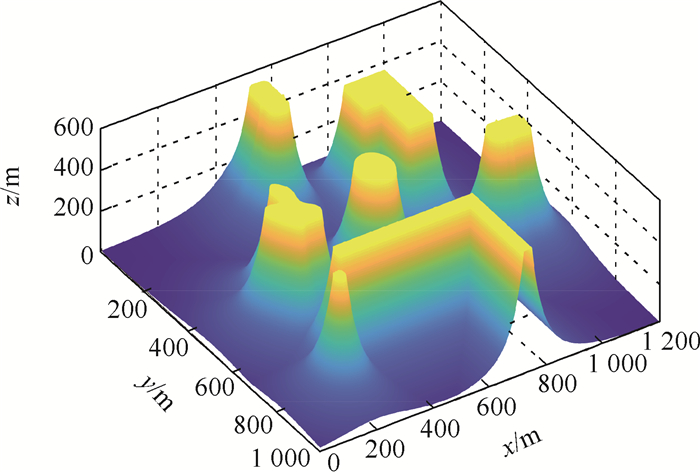
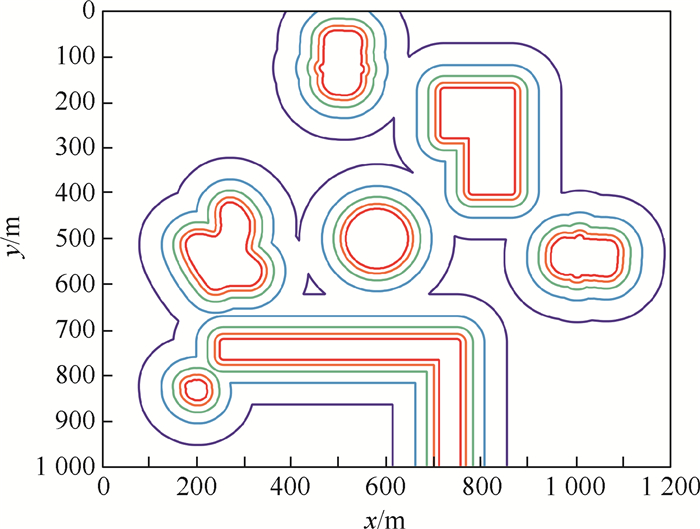
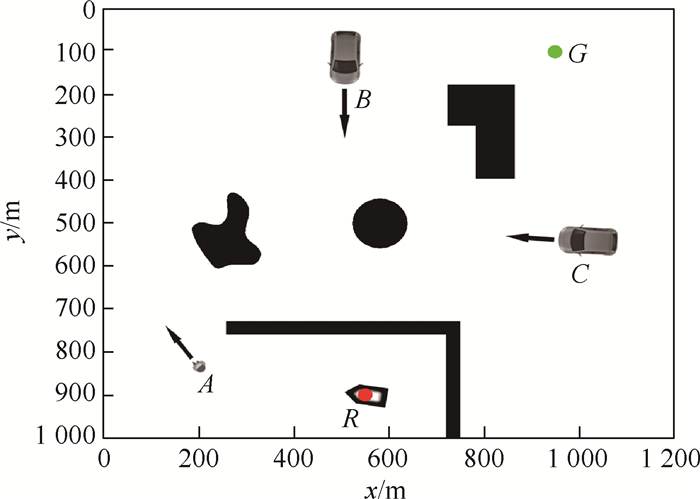
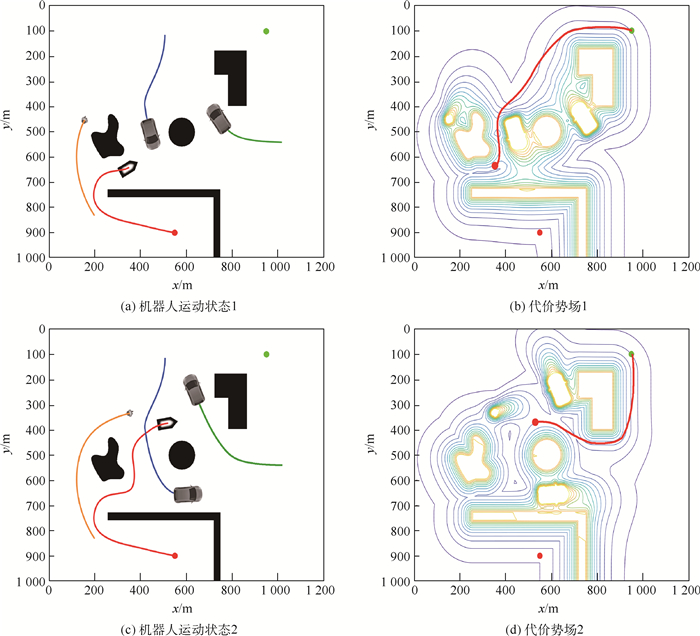
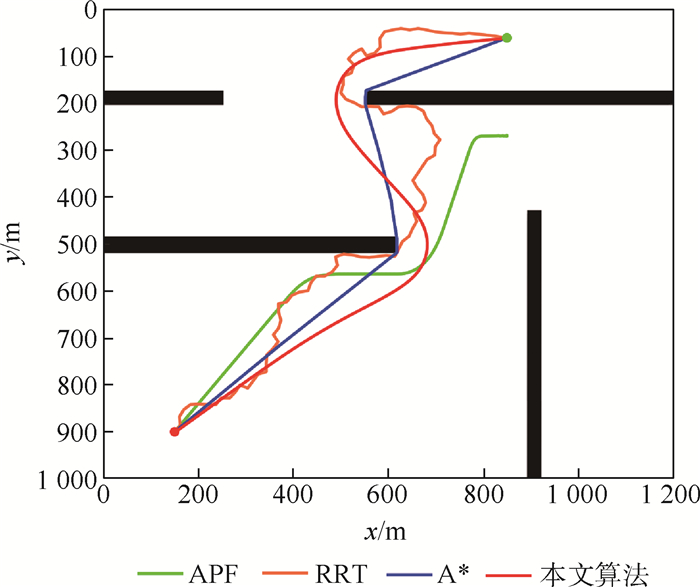
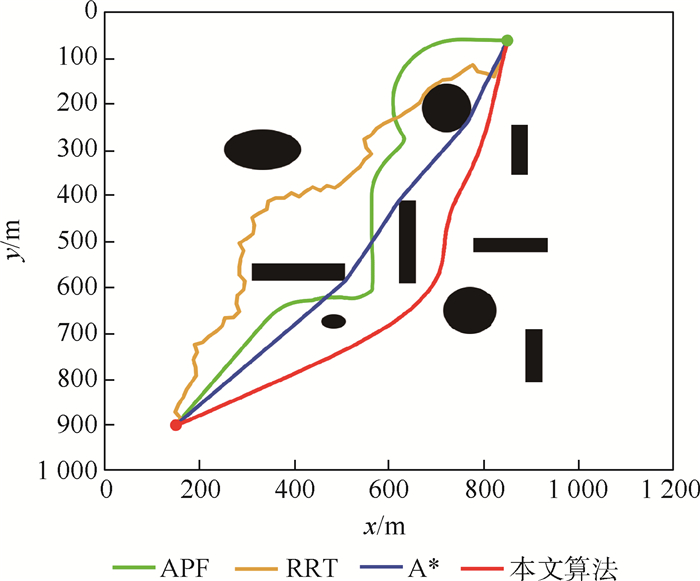
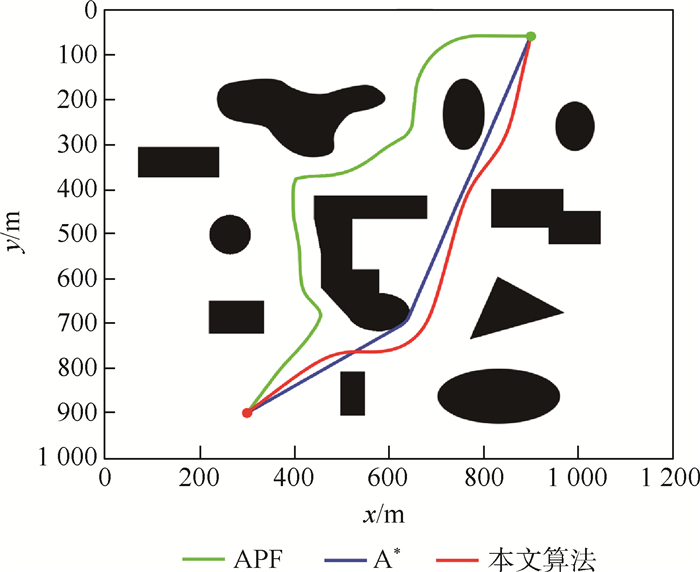
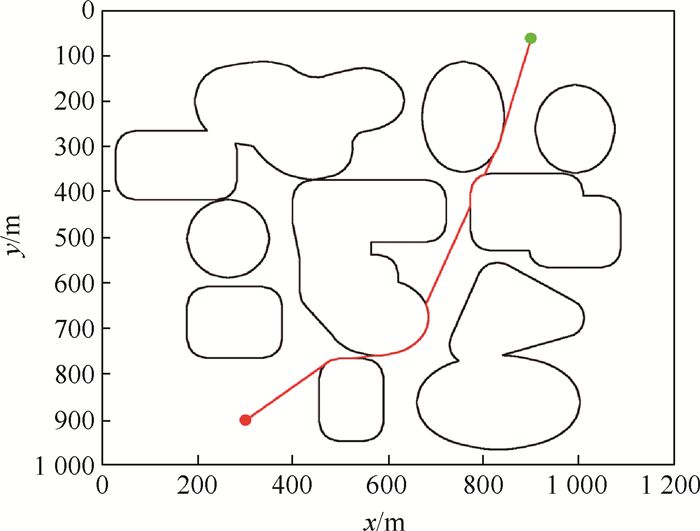
A mobile robot operates in a dynamic environment, so it must react quickly, maintain a clear path, and keep a safe distance from obstacles. To solve this problem, this paper proposes a dynamic obstacle avoidance method for mobile robots based on the obstacle cost potential field. By establishing a static grid map and the obstacle cost potential field, the equipotential lines in the dynamic scene and the tangents passing through the start to end points are obtained. Then the initial candidate path is obtained by the minimum spanning tree. The candidate path anchor points for the length of the path, the distance from the obstacle and the smoothness are optimized. He candidate path anchor points are then optimized for the path's length, distance from the obstruction, and smoothness. By introducing the influence of obstacle speed on the cost potential field, the robot can respond to the moving obstacle in time. In order to verify the effectiveness of the algorithm, the static scene and the dynamic scene are simulated separately in a grid scene with a resolution of 1 200×1 000 m. The results show that the algorithm in this paper can ensure that the path has a high degree of smoothness and maintain safety between obstacles. Moreover, it makes the path as short as possible under the condition of distance. At the same time, it can still maintain the smoothness of the path and the safety of obstacle avoidance in the dynamic obstacle scene, which can meet the requirements of mobile robot path planning in the dynamic scene.

| [1] |
PANDEY A, PANDEY S, PARHI D R. Mobile robot navigation and obstacle avoidance techniques: A review[J]. International Robotics & Automation Journal, 2017, 2(3): 96-105.
|
| [2] |
RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: An efficient alternative to SIFT or SURF[C]//2011 International Conference on Computer Vision. Piscataway: IEEE Press, 2011: 6-13.
|
| [3] |
HORNUNG A, WURM K M, BENNEWITZ M, et al. OctoMap: An efficient probabilistic 3D mapping framework based on octrees[J]. Autonomous Robots, 2013, 34(3): 189-206. doi: 10.1007/s10514-012-9321-0
|
| [4] |
YANG L, QI J, SONG D, et al. Survey of robot 3D path planning algorithms[J]. Journal of Control Science and Engineering, 2016, 2016: 1-22.
|
| [5] |
王洪斌, 尹鹏衡, 郑维, 等. 基于改进的A*算法与动态窗口法的移动机器人路径规划[J]. 机器人, 2020, 42(3): 346-353. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202003010.htm
WANG H B, YIN P H, ZHENG W, et al. Mobile robot path planning based on improved A* algorithm and dynamic window method[J]. Robot, 2020, 42(3): 346-353(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR202003010.htm
|
| [6] |
ZAFAR M N, MOHANTA J C. Methodology for path planning and optimization of mobile robots: A review[J]. Procedia Computer Science, 2018, 133: 141-152. doi: 10.1016/j.procs.2018.07.018
|
| [7] |
赵晓, 王铮, 黄程侃, 等. 基于改进A*算法的移动机器人路径规划[J]. 机器人, 2018, 40(6): 903-910. https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201806016.htm
ZHAO X, WANG Z, HUANG C K, et al. Mobile robot path planning based on an improved A* algorithm[J]. Robot, 2018, 40(6): 903-910(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JQRR201806016.htm
|
| [8] |
LIU J, YANG J, LIU H, et al. An improved ant colony algorithm for robot path planning[J]. Soft Computing, 2017, 21(19): 5829-5839. doi: 10.1007/s00500-016-2161-7
|
| [9] |
林依凡, 陈彦杰, 何炳蔚, 等. 无碰撞检测RRT*的移动机器人运动规划方法[J]. 仪器仪表学报, 2020, 41(10): 257-267. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB202010028.htm
LIN Y F, CHEN Y J, HE B W, et al. Non-collision checking RRT* algorithm for mobile robot motion planning[J]. Chinese Journal of Scientific Instrument, 2020, 41(10): 257-267(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB202010028.htm
|
| [10] |
薛学华, 冯辉, 徐海祥, 等. 基于改进人工势场法的USV全局路径规划[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(6): 978-983. doi: 10.3963/j.issn.2095-3844.2020.06.007
XUE X H, FENG H, XU H X, et al. Global path planning of USV base on improved artifical potential field method[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2020, 44(6): 978-983(in Chinese). doi: 10.3963/j.issn.2095-3844.2020.06.007
|
| [11] |
THRUN S. Learning occupancy grid maps with forward sensor models[J]. Autonomous Robots, 2003, 15(2): 111-127. doi: 10.1023/A:1025584807625
|
| [12] |
SAVKIN A V, LI H. A safe area search and map building algorithm for a wheeled mobile robot in complex unknown cluttered environments[J]. Robotica, 2018, 36(1): 96.
|
| [13] |
KOREN Y, BORENSTEIN J. Potential field methods and their inherent limitations for mobile robot navigation[C]//IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 1991: 1398-1404.
|
| [14] |
KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7): 846-894.
|
| [15] |
HART P E, NILSSON N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths[J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107.
|
| [16] |
YAO P, WANG H, SU Z. Real-time path planning of unmanned aerial vehicle for target tracking and obstacle avoidance in complex dynamic environment[J]. Aerospace Science and Technology, 2015, 47: 269-279.
|

Figures(22) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: