| Citation: | ZHANG Ruixin, LI Ning, ZHANG Xiaxia, et al. Low-altitude UAV detection method based on optimized CenterNet[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2335-2344. doi: 10.13700/j.bh.1001-5965.2021.0108(in Chinese)

|
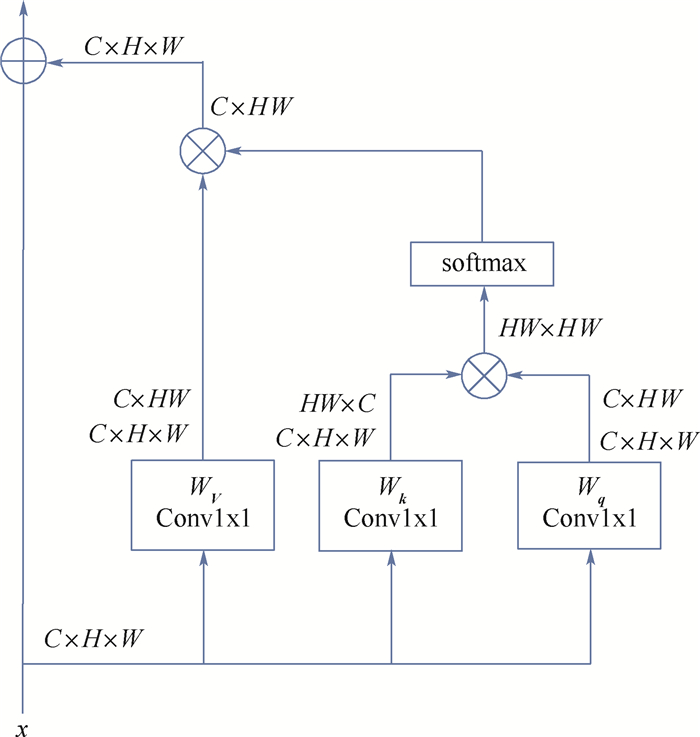
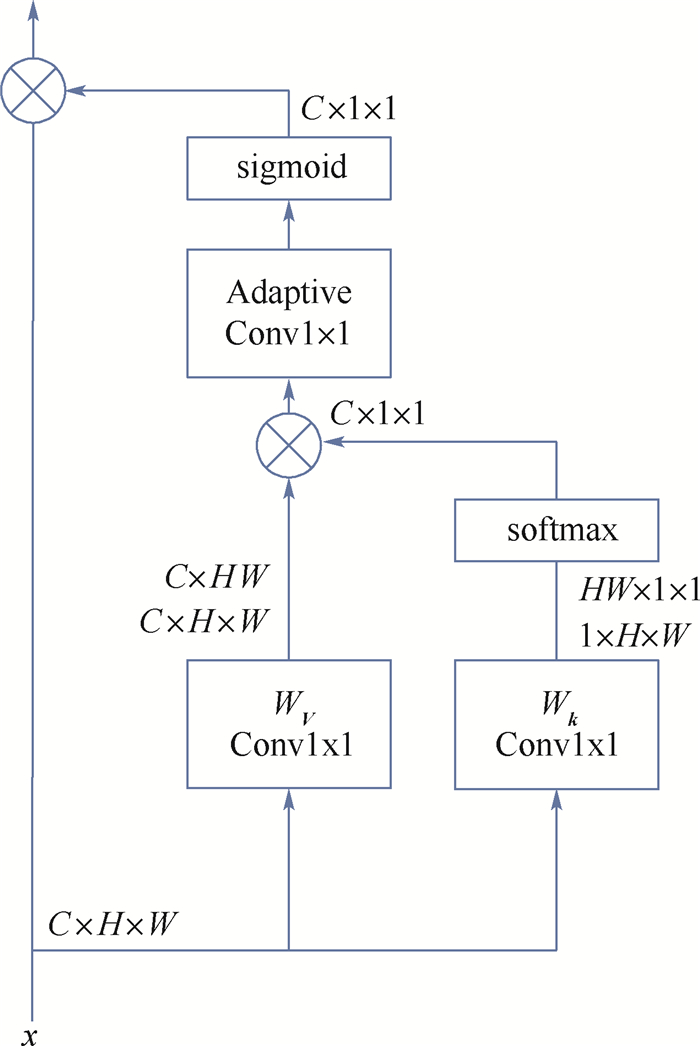
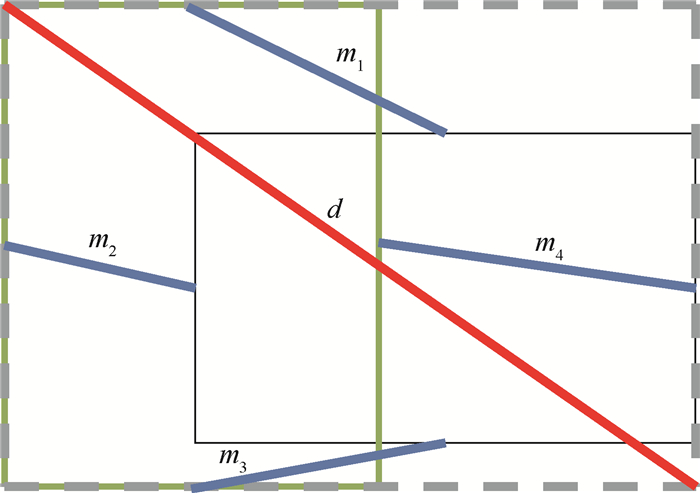
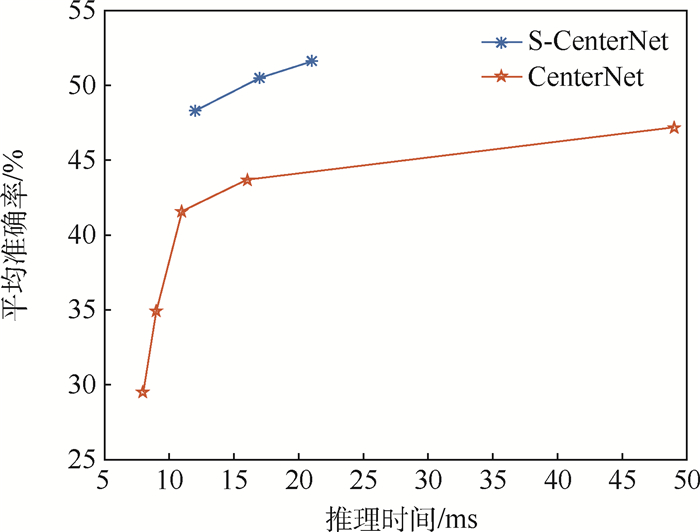
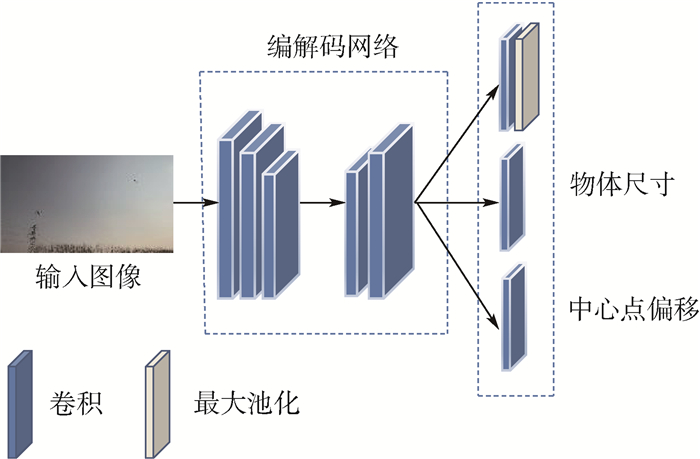
To achieve effective detection of "low, slow and small" unmanned aerial vehicle(UAV)and improve detection accuracy and positioning quality, we propose a low-altitude UAV detection method based on joint attention and CenterNet. Aiming at the problem of high miss-detection rate of small targets in general target detection algorithms, a decoupled non-local operator is introduced to capture the relevance of target regions in optical images. Utilizing the similarity between individuals of the UAV group, the discrete UAV features are correlated to each other to reduce the missed detection rate. Moreover, to obtain more accurate detection boxes, we optimized the label coding strategy and bounding box regression method of CenterNet, and the positioning quality loss is introduced to improve the positioning quality of the detection boxes. Experimental results show that the optimized S-CenterNet algorithm has an average accuracy increase of 8.9% compared with the original CenterNet, and the detection boxer positioning quality has been significantly improved.

| [1] |
于飞, 刘东华, 贺飞扬. 无人机"黑飞"对电磁空间安全的挑战[J]. 中国无线电, 2018(8): 43-44. https://www.cnki.com.cn/Article/CJFDTOTAL-ZWDG201808032.htm
YU F, LIU D H, HE F Y. UAV "black flying" challenges the safety of electromagnetic space[J]. China Radio, 2018(8): 43-44(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZWDG201808032.htm
|
| [2] |
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2014: 580-587.
|
| [3] |
GIRSHICK R. Fast-RCNN[C]//Proceedings of the IEEE Conference on Computer Vision. Piscataway: IEEE Press, 2015: 1440-1448.
|
| [4] |
REN S, HE K, GIRSHICK R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017(6): 1137-1149.
|
| [5] |
CAI Z, VASCONCELOS N. Cascade R-CNN: Delving into high quality object detection[C]//Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 6154-6162.
|
| [6] |
HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]//Proceedings of 2017 IEEE International Conference on Compu-ter Vision. Piscataway: IEEE Press, 2017: 2980-2988.
|
| [7] |
REDMON J, FARHADI A. YOLOv3: An incremental improvement[EB/OL]. (2018-04-08)[2021-01-12]. https://arxiv.org/abs/1804.02767.
|
| [8] |
LIN T, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection[C]//Proceedings of 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE Press, 2017: 2999-3007.
|
| [9] |
LAW H, DENG J. CornerNet: Detecting objects as paired keypoints[J]. International Journal of Computer Vision, 2018, 128: 642-656.
|
| [10] |
ZHOU X, WANG D, KRÄHENBVHL P. Objects as points[EB/OL]. (2019-04-16)[2021-01-12]. https://arxiv.org/abs/1603.06937.
|
| [11] |
WANG X, GIRSHICK R, GUPTA A, et al. Non-local neural networks[C]//Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 7794-7803.
|
| [12] |
CAO Y, XU J, LIN S, et al. Global context networks[J/OL]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020(2020-12-24)[2021-01-12]. https://doi.org/10.1109/TPAMI.2020-3047209.
|
| [13] |
YIN M, YAO Z, CAO Y, et al. Disentangled non-local neural networks[EB/OL]. (2020-11-08)[2021-01-12]. https://arxiv.org/abs/2006.06668.
|
| [14] |
WANG Q, WU B, ZHU P, et al. ECA-Net: Efficient channel attention for deep convolutional neural networks[C]//Proceedings of 2020 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2020: 11531-11539.
|
| [15] |
HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]//Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2016: 770-778.
|
| [16] |
YU F, WANG D, SHELHAMER E, et al. Deep layer aggregation[C]//Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018: 2403-2412.
|
| [17] |
NEWWLL A, YANG K, JIA D. Stacked hourglass networks for human pose estimation[EB/OL ]. (2016-03-22)[2020-12-28]. https://arxiv.org/abs/1603.06937.
|
| [18] |
WANG C, LIAO H Y, WU Y, et al. CSPNet: A new backbone that can enhance learning capability of CNN[C]//Proceedings of 2020 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2020: 1571-1580.
|
| [19] |
ZHU X Z, HU H, LIN S, et al. Deformable ConvNets v2: More deformable, better results[C]//Proceedings of 2019 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2019: 9308-9316.
|
Figures(10) / Tables(8)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: