| Citation: | NIE Liangyi, DING Huafeng, WANG Jun, et al. Branch graph method for crank judgement of complex multi-loop linkage[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1863-1874. doi: 10.13700/j.bh.1001-5965.2021.0152(in Chinese)

|
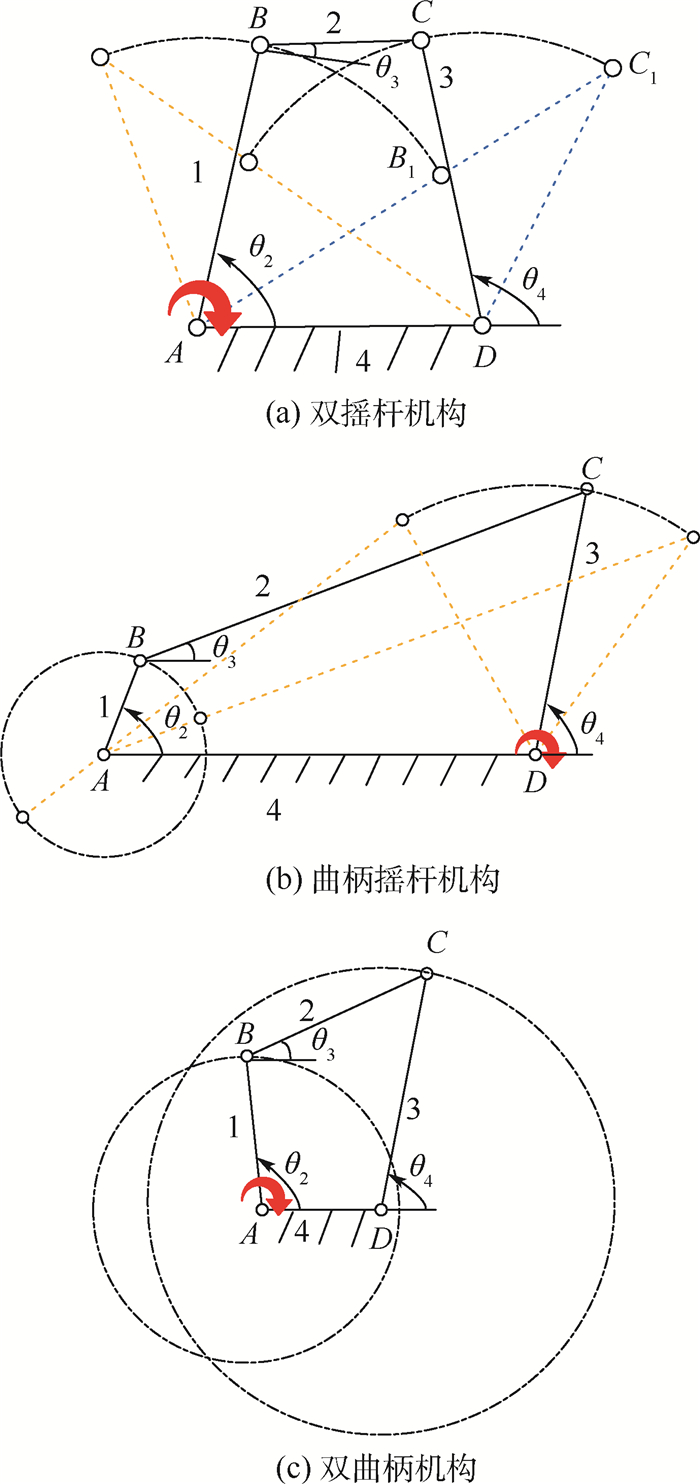
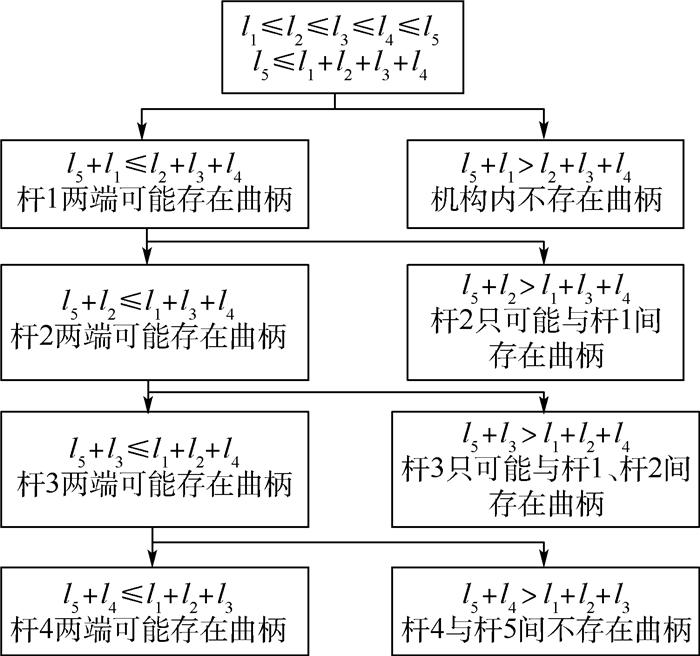
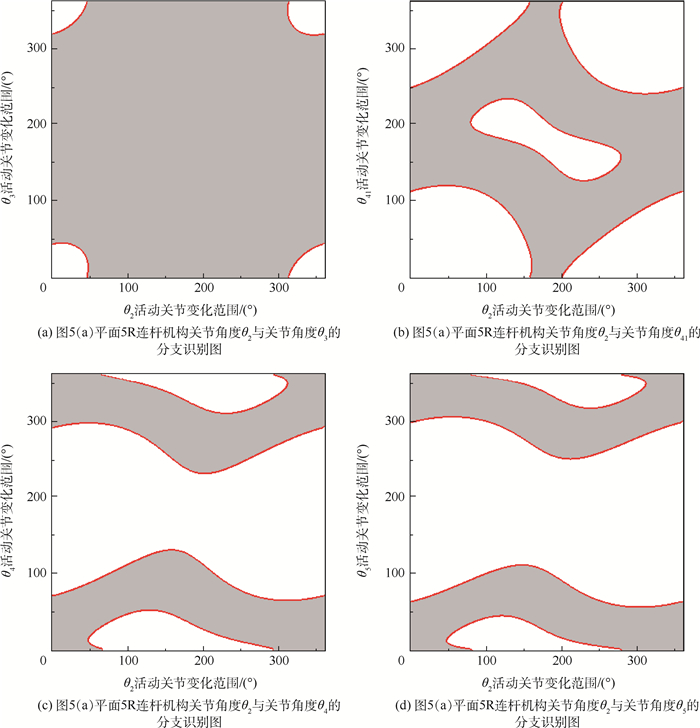
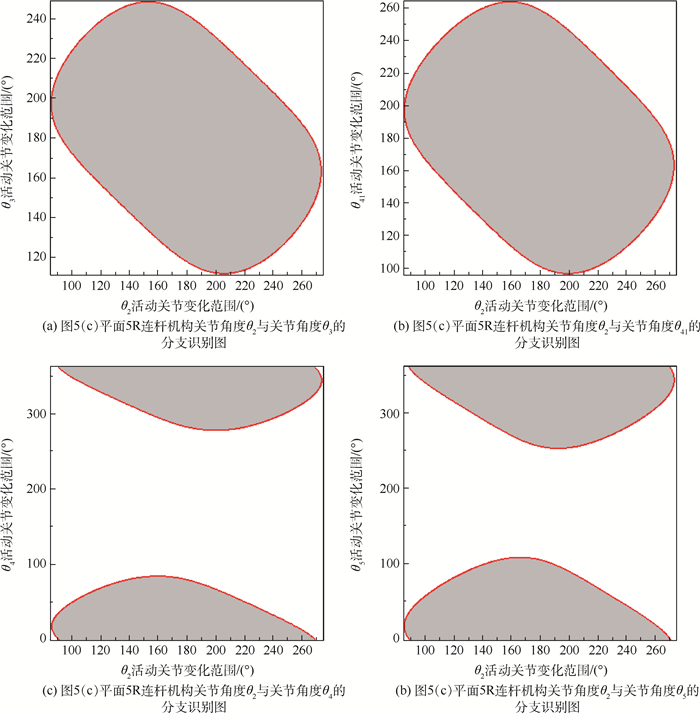
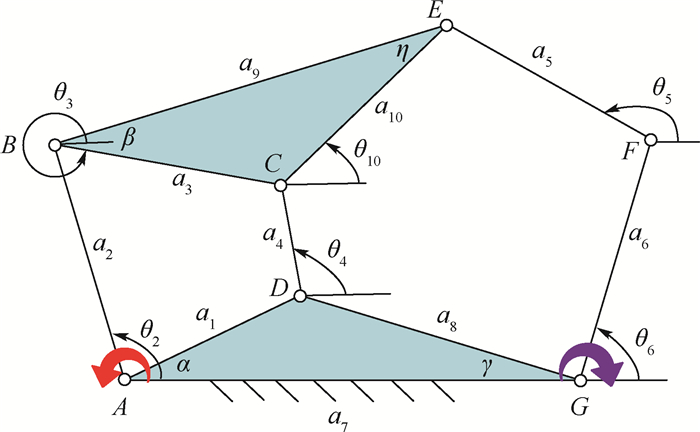
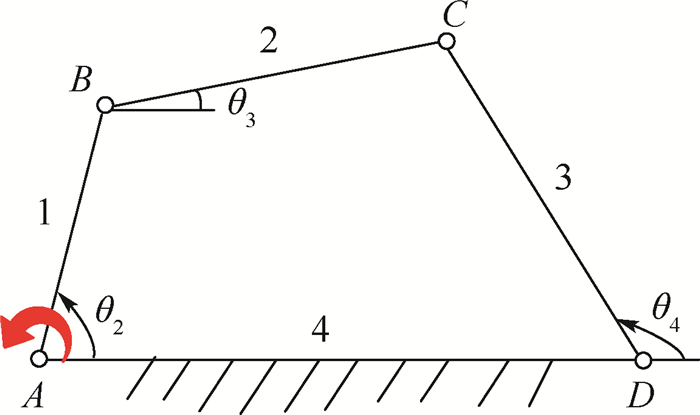
Crank judgement is an important link in kinematic analysis of mechanisms, which determines the motion state of the mechanism. The existing Grashof theorem and N-bar rotation theorem can well solve the problem of crank judgement of single closed-loop linkage with only R joints, but there is no general and effective solution for crank judgement of complex multi-loop linkage widely used in aerospace. A branch graph identification method for determining the crank of complex multi-loop linkage is proposed. This method first determines the first sufficient condition for the existence of the crank through the inequality of the link relationship of each loop in the complex multi-loop linkage, and then determines the second sufficient condition for the existence of the crank by combining the branch graph of the linkage with the rotation range of the movable joint. On the basis of summing up the sufficient conditions, this method is used to analyze the planar 4R and 5R linkages, and the outcomes are compared with the existing recognized results, verifing the effectiveness of this method. Finally, the crank judgment is carried out on a complex multi-loop Stephenson six-bar linkage with only rotating pairs, which proves the feasibility of the method.

| [1] |
GRASHOF F. Theroetische maschinenlehre[M]. Leipzig: Engineering Press, 1983: 382.
|
| [2] |
张全明, 梁文贤, 常勇. 关于2-DOF平面五杆机构的双曲柄存在条件的再研究[J]. 机械科学与技术, 2008, 27(1): 78-82. https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200801019.htm
ZHANG Q M, LIANG W X, CHANG Y. Further study of conditions for double-crank of 2-DOF planar five-link linkage[J]. Mechanical Science and Technology for Aerospace Engineering, 2008, 27(1): 78-82(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXKX200801019.htm
|
| [3] |
田汉民, 张策, 张新华. 二自由度平面五杆机构的双曲柄存在条件[J]. 机械设计, 2001(3): 23-25. https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ200103008.htm
TIAN H M, ZHANG C, ZHANG X H. Existence conditions for double crank of planar five-bar linkage with two free degrees[J]. Journal of Machine Design, 2001(3): 23-25(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXSJ200103008.htm
|
| [4] |
廖汉元, 孔建益, 李佳, 等. 平面两自由度铰链五杆机构的类型及判别[J]. 湖北工业大学学报, 2006, 21(3): 4-6. https://www.cnki.com.cn/Article/CJFDTOTAL-HBGX200603001.htm
LIAO H Y, KONG J Y, LI J, et al. The types of 5-bra linkage with two-degree of freedom and their differentiation[J]. Journal of Hubei University of Technology, 2006, 21(3): 4-6(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HBGX200603001.htm
|
| [5] |
TING K L, TSAI G H. Mobility and synthesis of five-bar-programmable-linkages[C]//Proceedings of the 9th OSU Applied Mechanisms Conference, 1985: 1-8.
|
| [6] |
TING K L. Five-bar Grashof criteria[J]. Journal of Mechanisms, Transmissions, and Automation in Design, 1986, 108(4): 533-537. doi: 10.1115/1.3258765
|
| [7] |
TING K, WANG J, XUE C, et al. Full rotatability of Stephenson six-bar and geared five-bar linkages[C]//Proceedings of the ASME 2008 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. New York: ASME, 2008: 581-590.
|
| [8] |
WANG J, TING K L, ZHAO D, et al. Full rotatability of Watt six-bar linkages[C]//Proceedings of the ASME 2014 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. New York: ASME, 2014, 46360: V05AT08A049.
|
| [9] |
郭晓宁, 褚金奎. Stephenson Ⅱ型六杆机构曲柄存在条件及判断方法[J]. 农业机械学报, 2004, 35(3): 120-123. doi: 10.3969/j.issn.1000-1298.2004.03.033
GUO X N, CHU J K. Identification of a crank for Stephenson Ⅱ six-bar linkage[J]. Transactions of the Chinese Society for Agricultural Machinery, 2004, 35(3): 120-123(in Chinese). doi: 10.3969/j.issn.1000-1298.2004.03.033
|
| [10] |
宋杰, 梅瑛, 李瑞琴. 平面3-DOF PRR-RRP型六杆机构的曲柄存在条件[J]. 机械传动, 2013, 37(11): 32-34. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201311008.htm
SONG J, MEI Y, LI R Q. Crank existence condition of planar 3-DOF PRR-RRP type six-bar mechanism[J]. Journal of Mechanical Transmission, 2013, 37(11): 32-34(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201311008.htm
|
| [11] |
DAI J S, SHAH P. Orientation capability of planar serial mani-pulators using rotatability analysis based on workspace decomposition[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2002, 216(3): 275-288.
|
| [12] |
TING K. Joint rotation space and mobility of linkages[C]//Proceedings of the ASME 2007 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. New York: ASME, 2007: 427-437.
|
| [13] |
WANG J. Mobility identification and rectification of planar multiloop mechanisms[D]. Cookeville: Tennessee Technological University, 2010: 152-153.
|
| [14] |
NIE L, WANG J, TING K L, et al. Branch identification of spherical six-bar linkages[C]//Proceedings of the ASME 2016 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. New York: ASME, 2016, 50169: V05BT07A072.
|
| [15] |
NIE L, DING H, KECSKEMÉTHY A, et al. Singularity and branch identification of a 2 degree-of-freedom (DOF) seven-bar spherical parallel manipulator[J]. Mechanical Sciences, 2020, 11(2): 381-393.
|
| [16] |
TING K, LIU Y. Rotatability laws for N-bar kinematic chains and their proof[J]. ASME Journal of Mechanical Design, 1991, 113(1): 32-39.
|
Figures(15) / Tables(11)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: