| Citation: | CHEN H Z,SUN R,QIU M,et al. An adaptive noise variance based fault detection algorithm for GNSS positioning[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):406-421 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0222

|
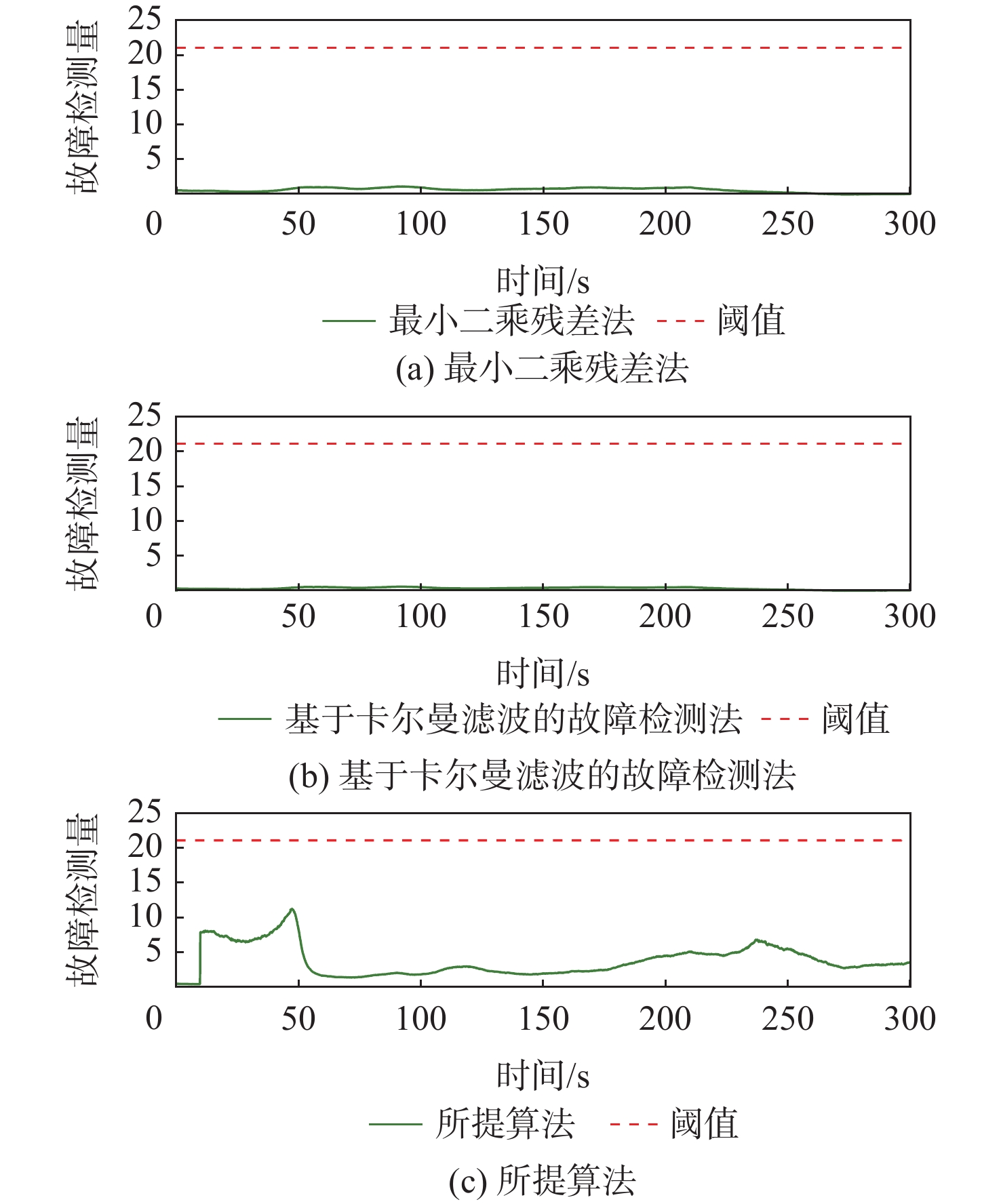
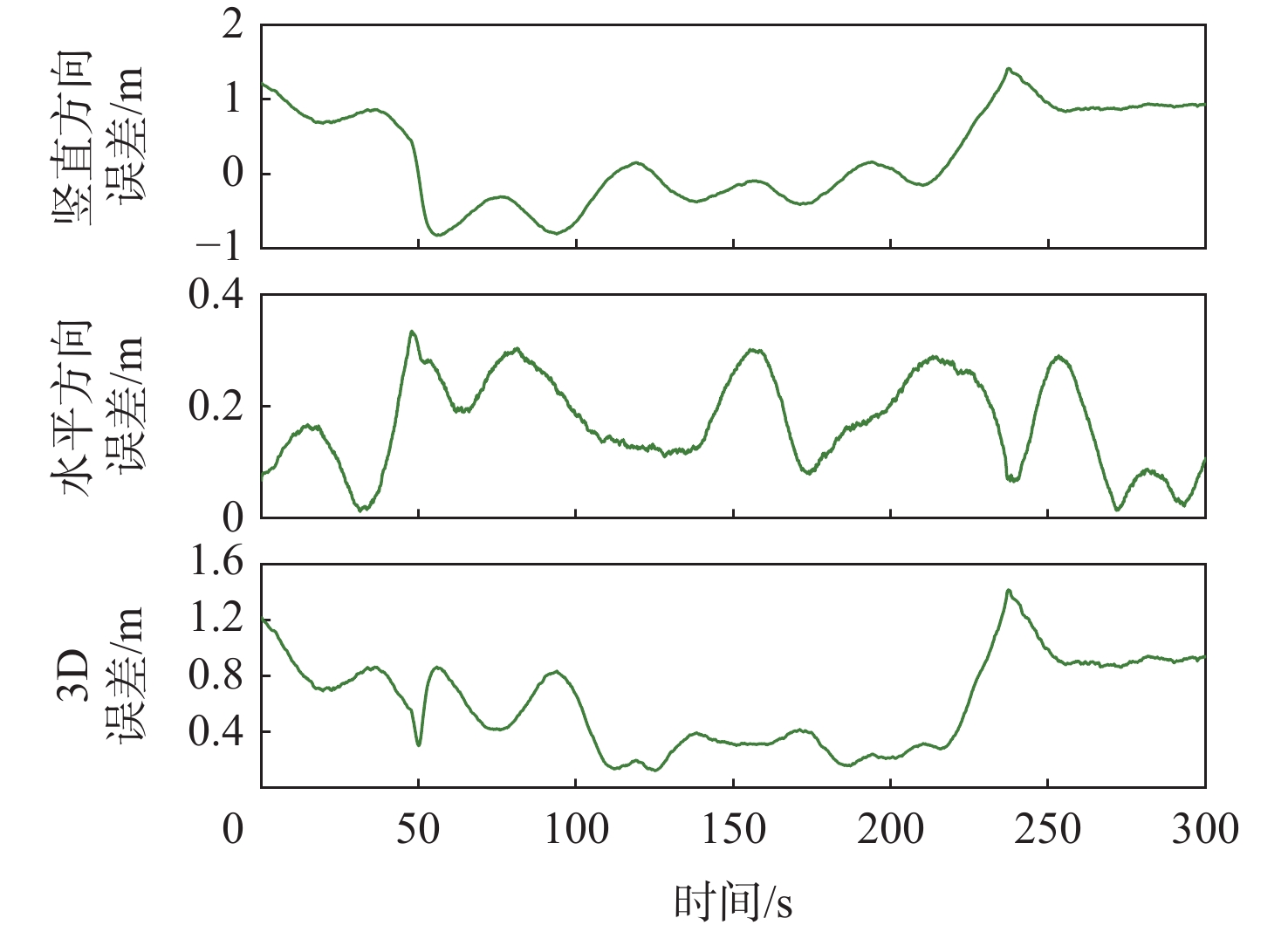
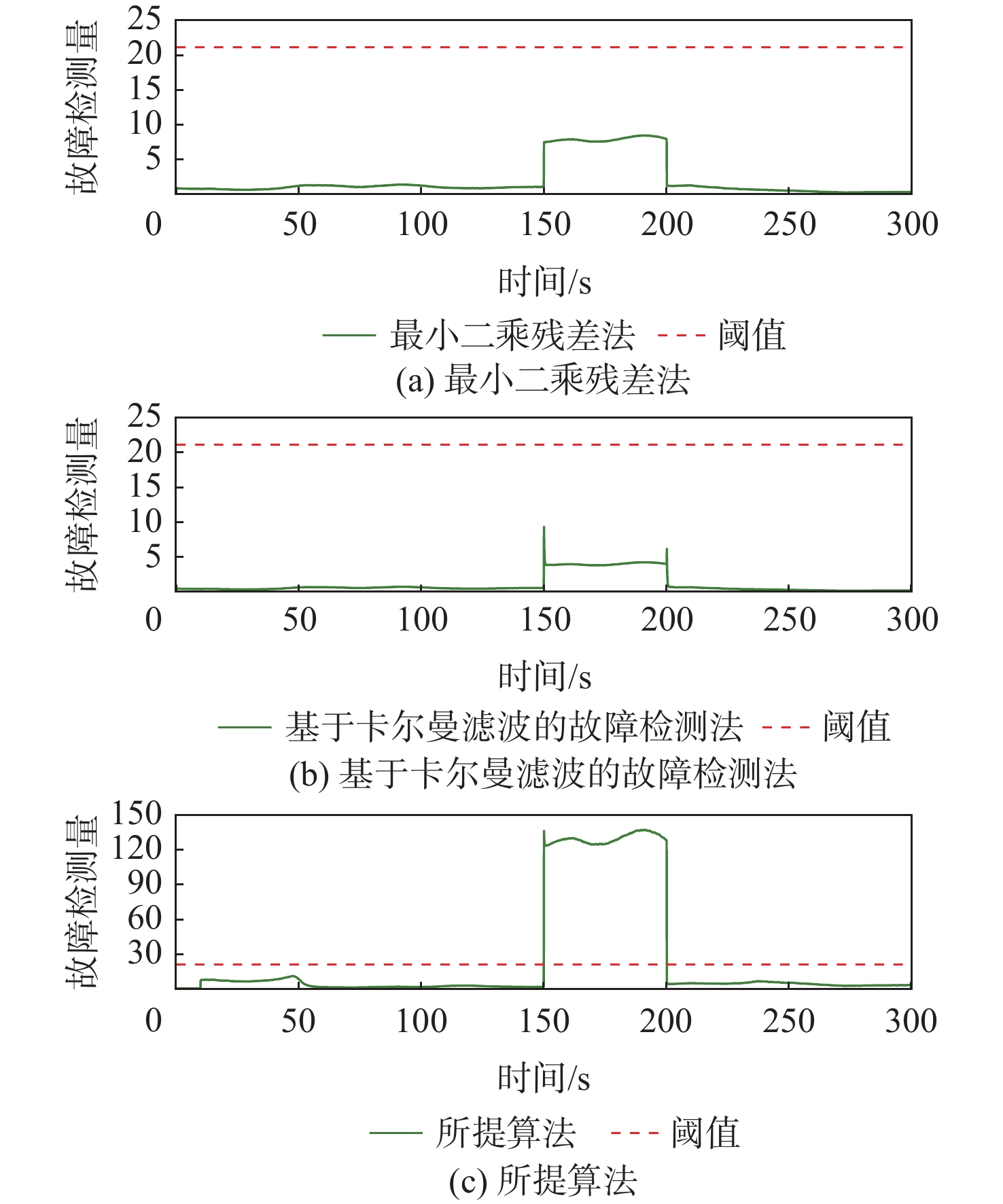
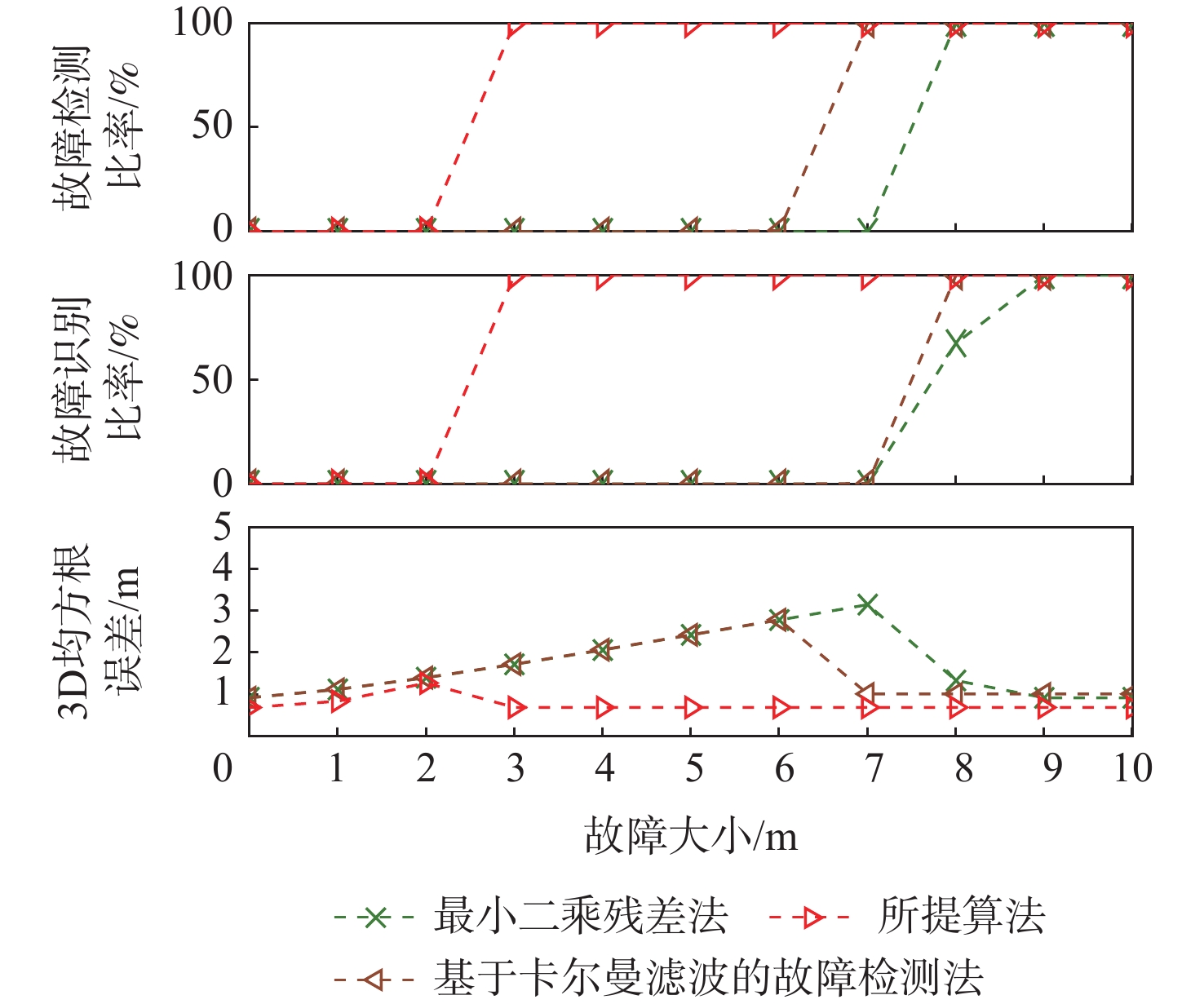
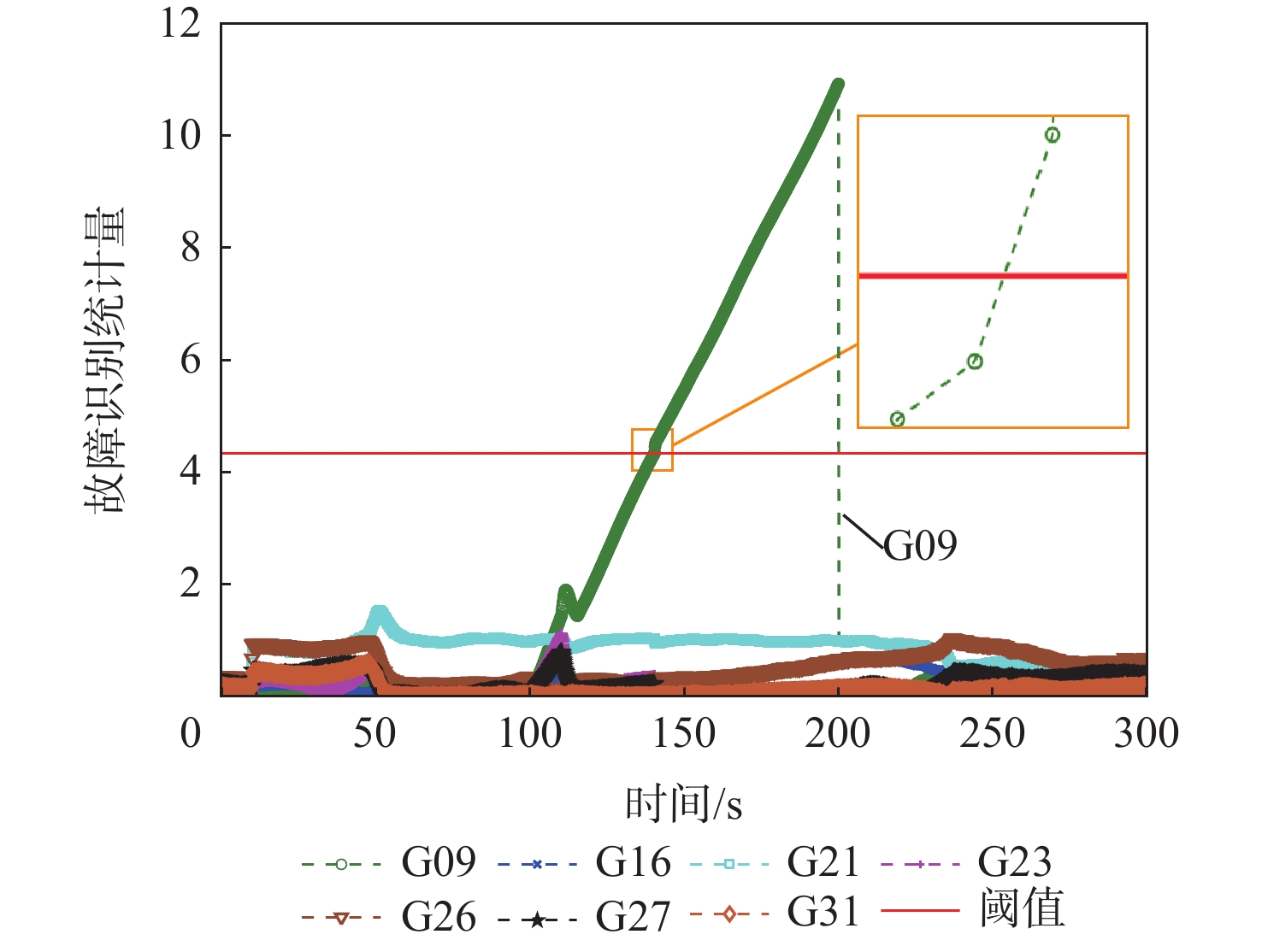
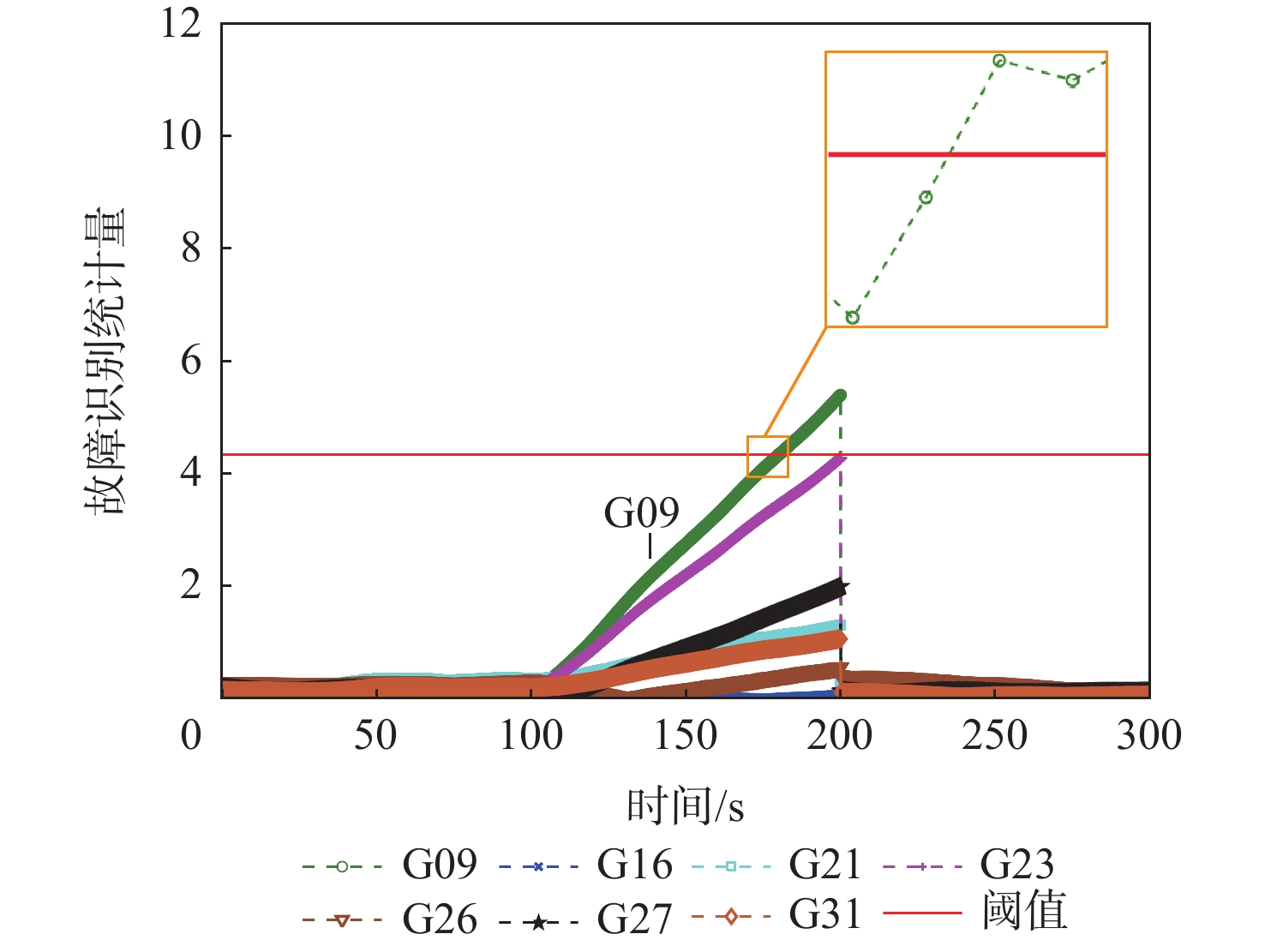
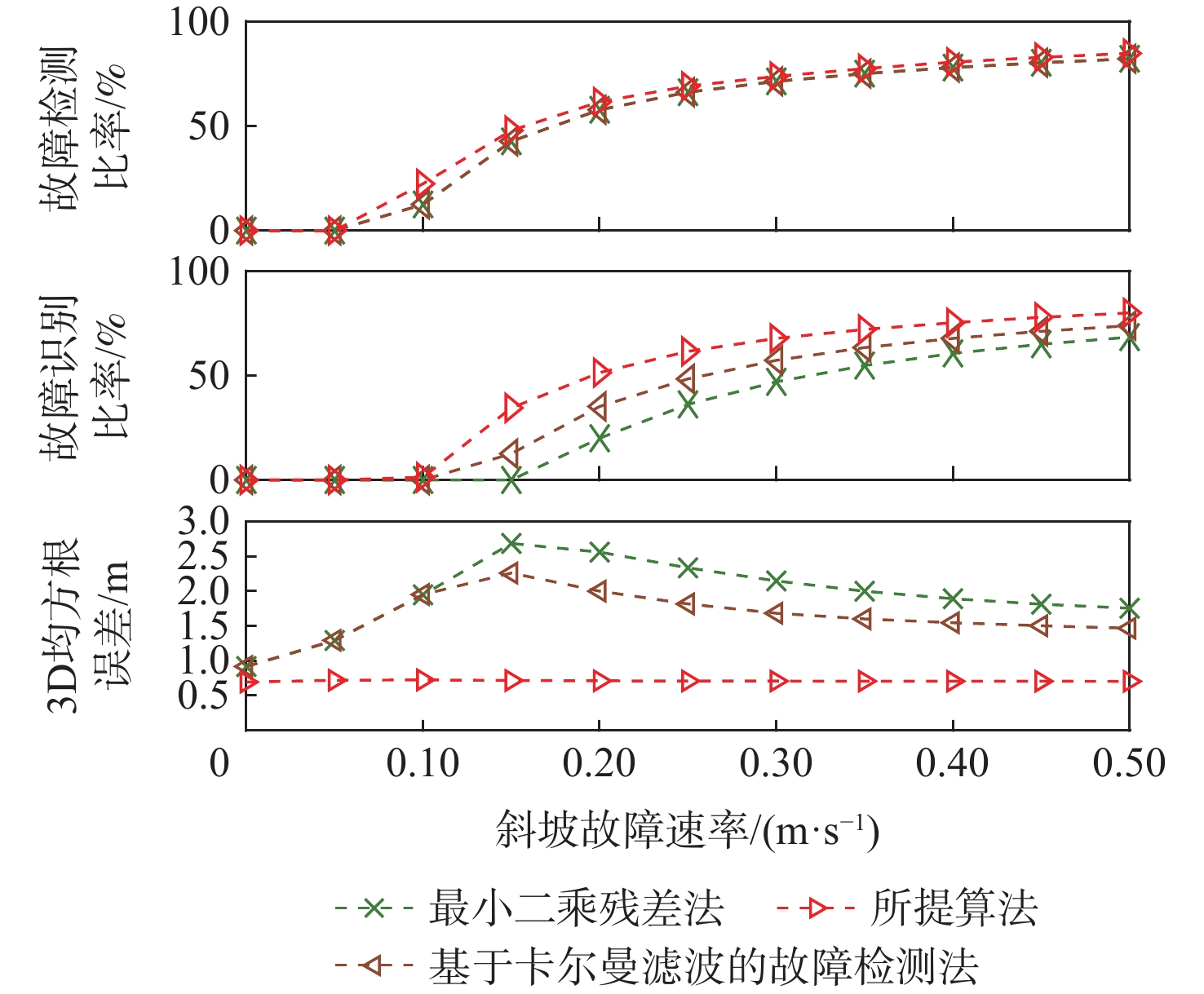
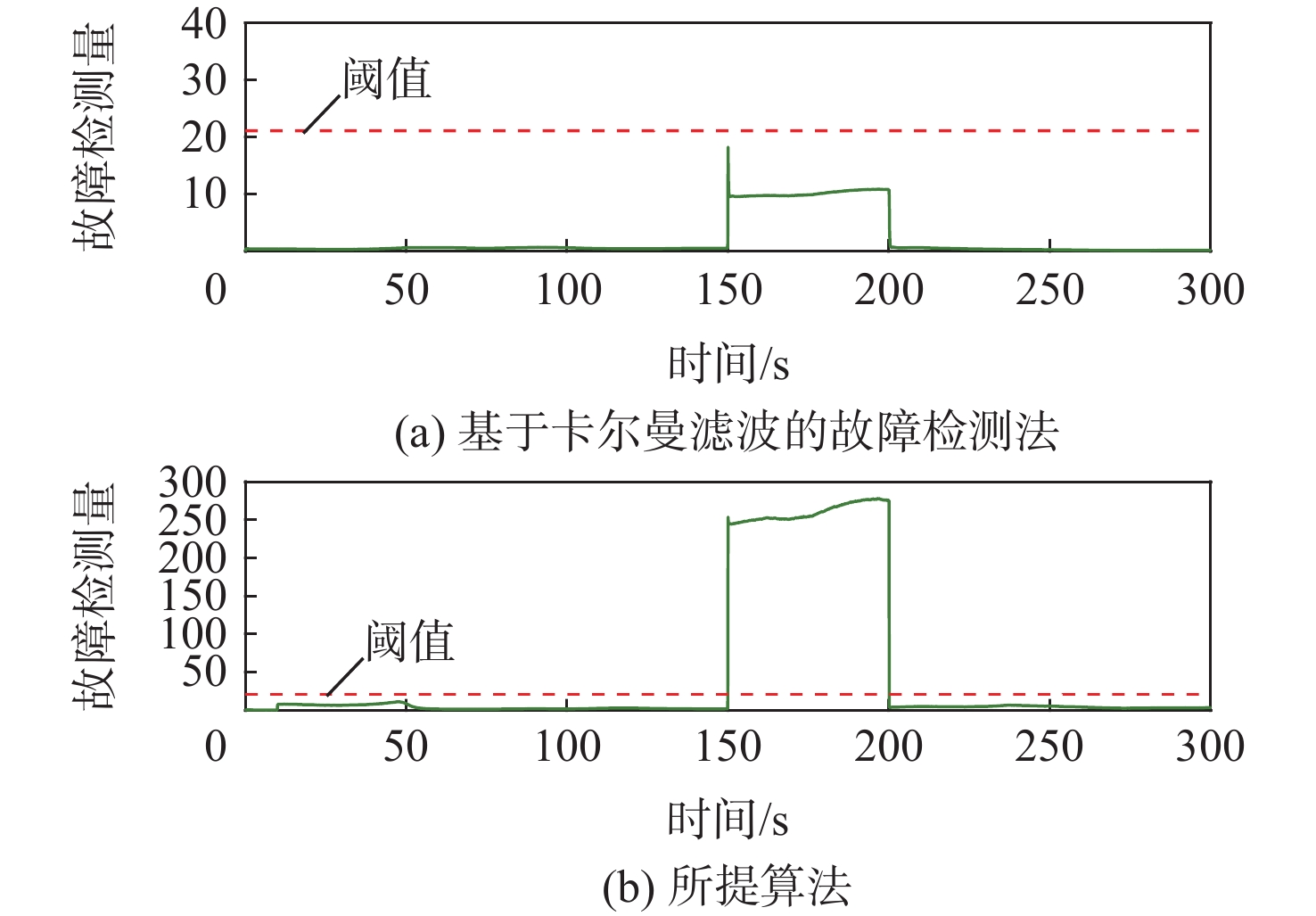
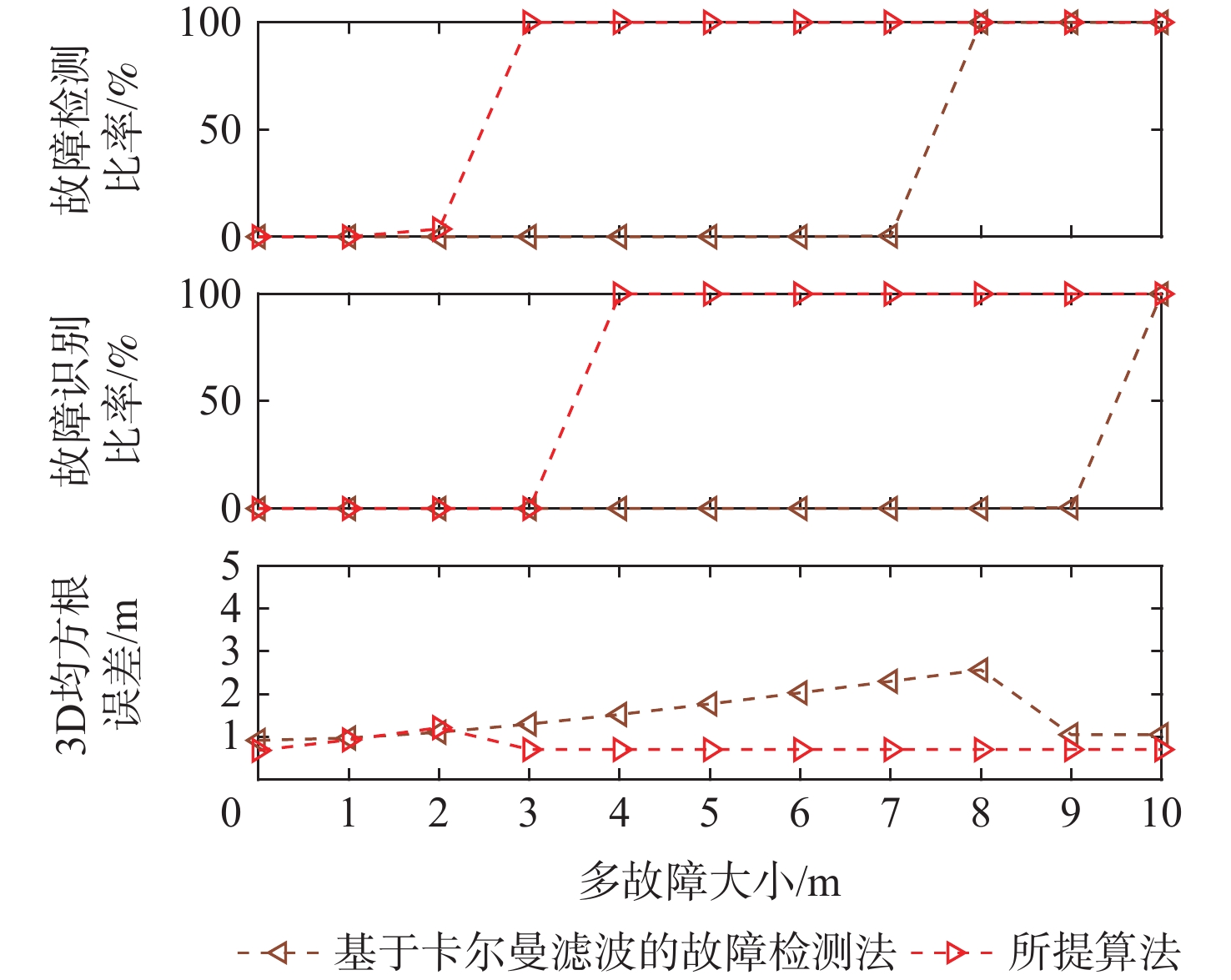
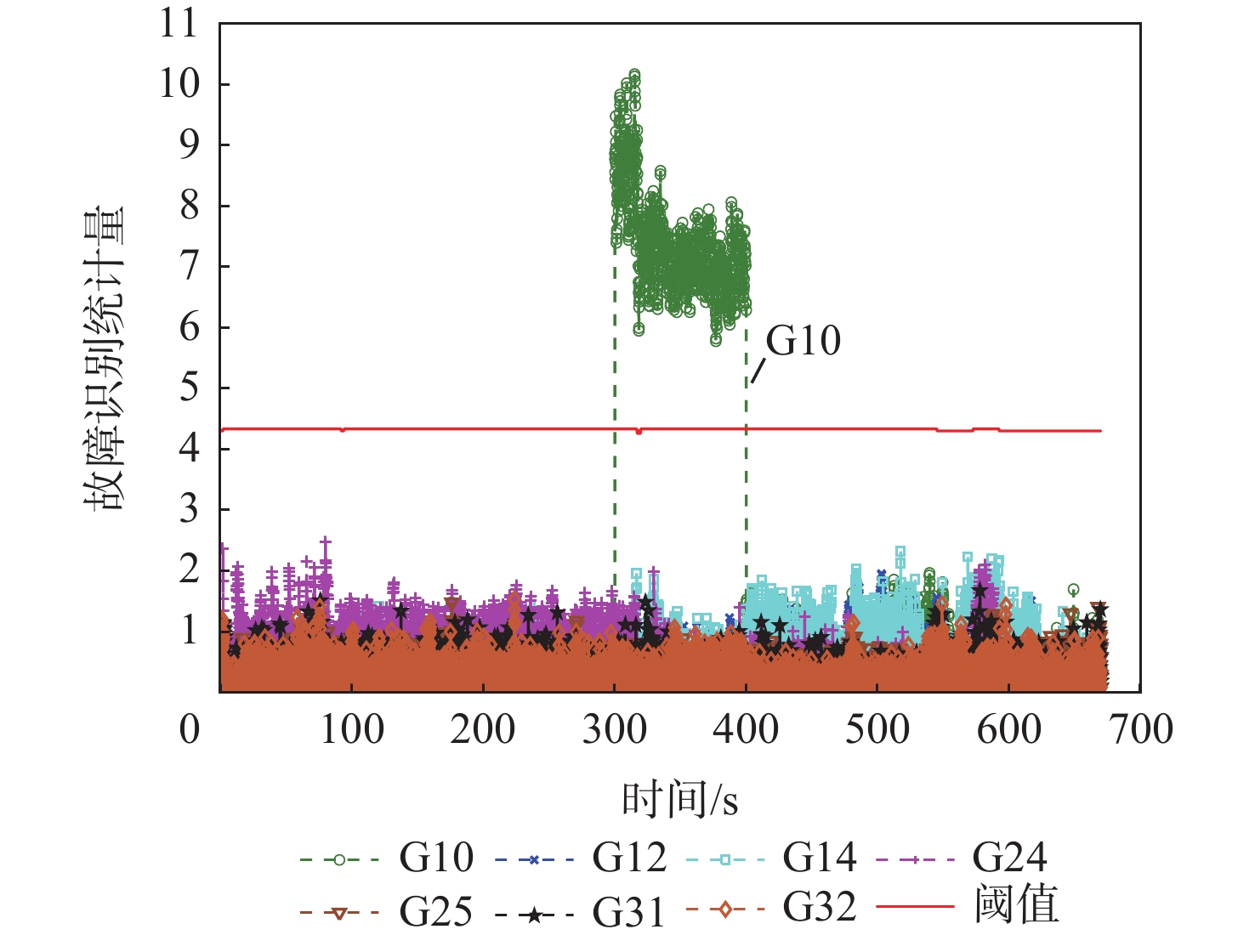
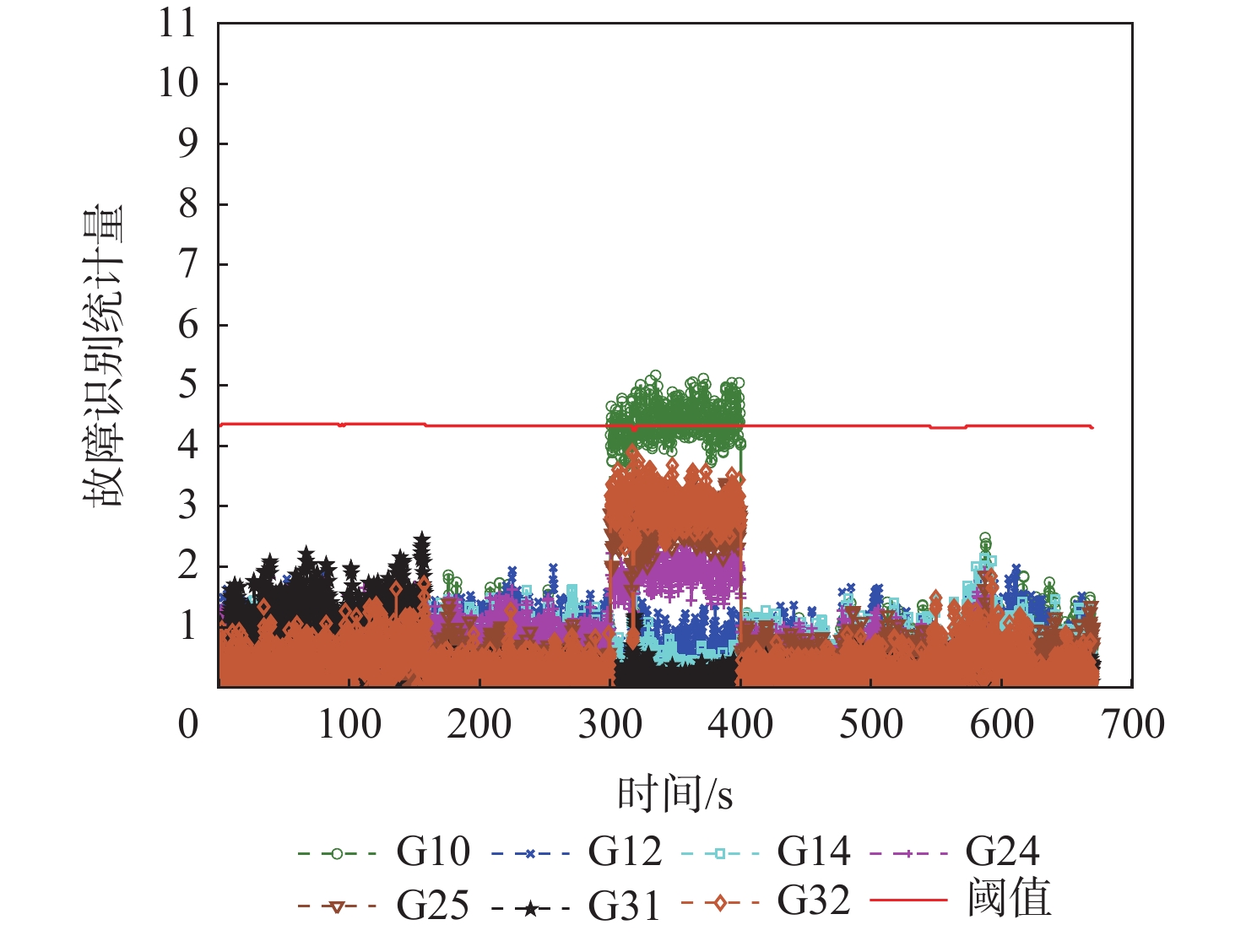
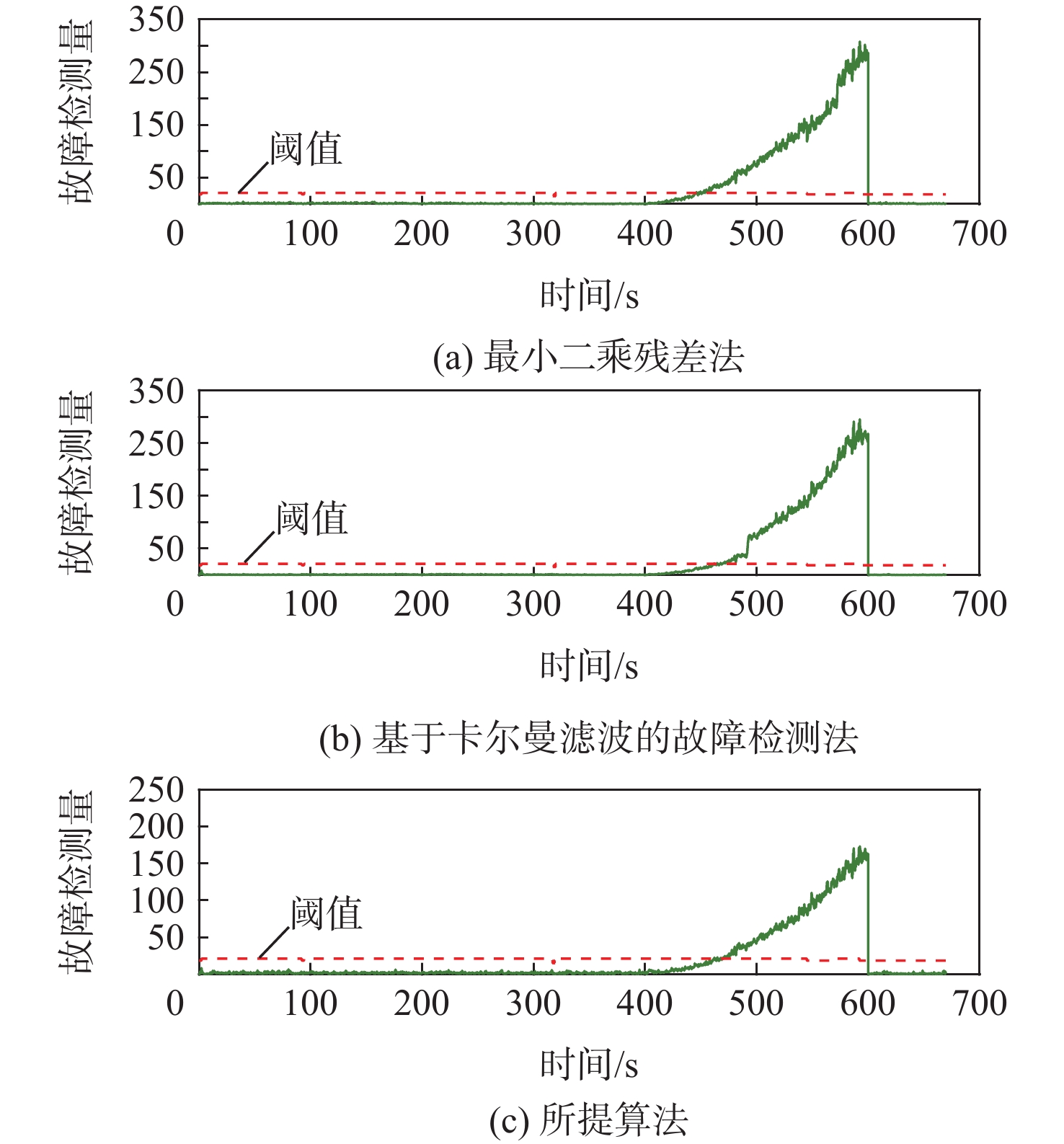
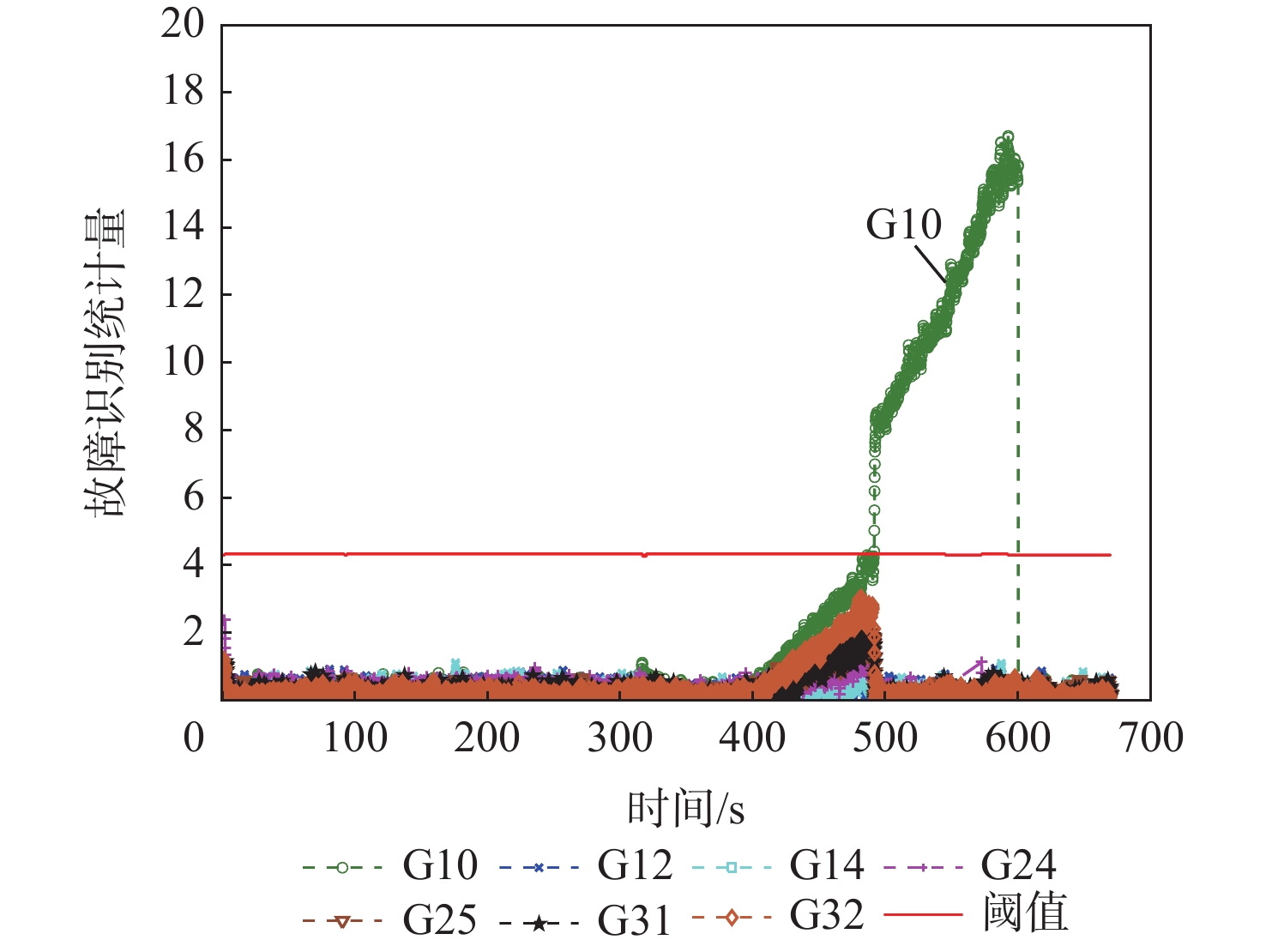
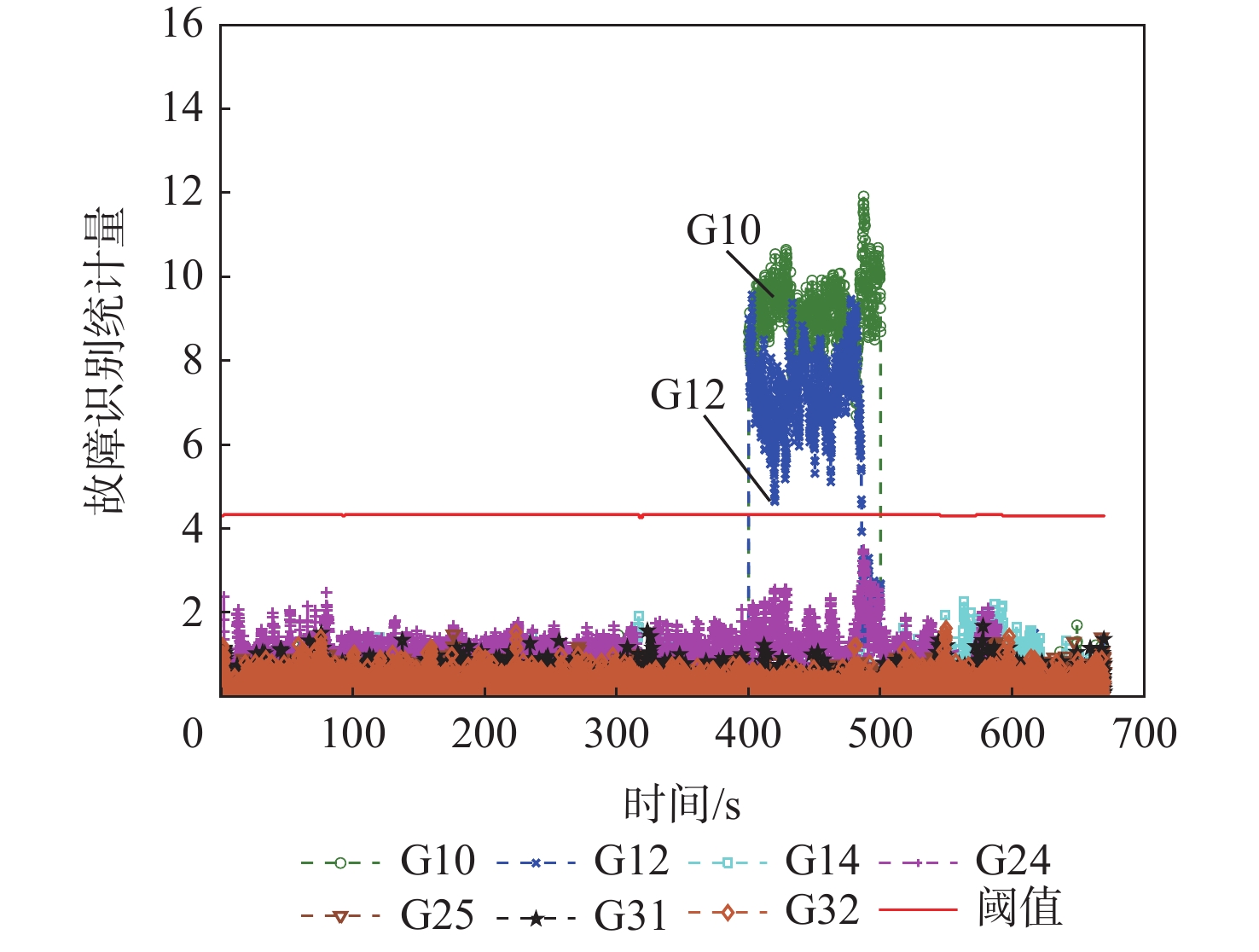
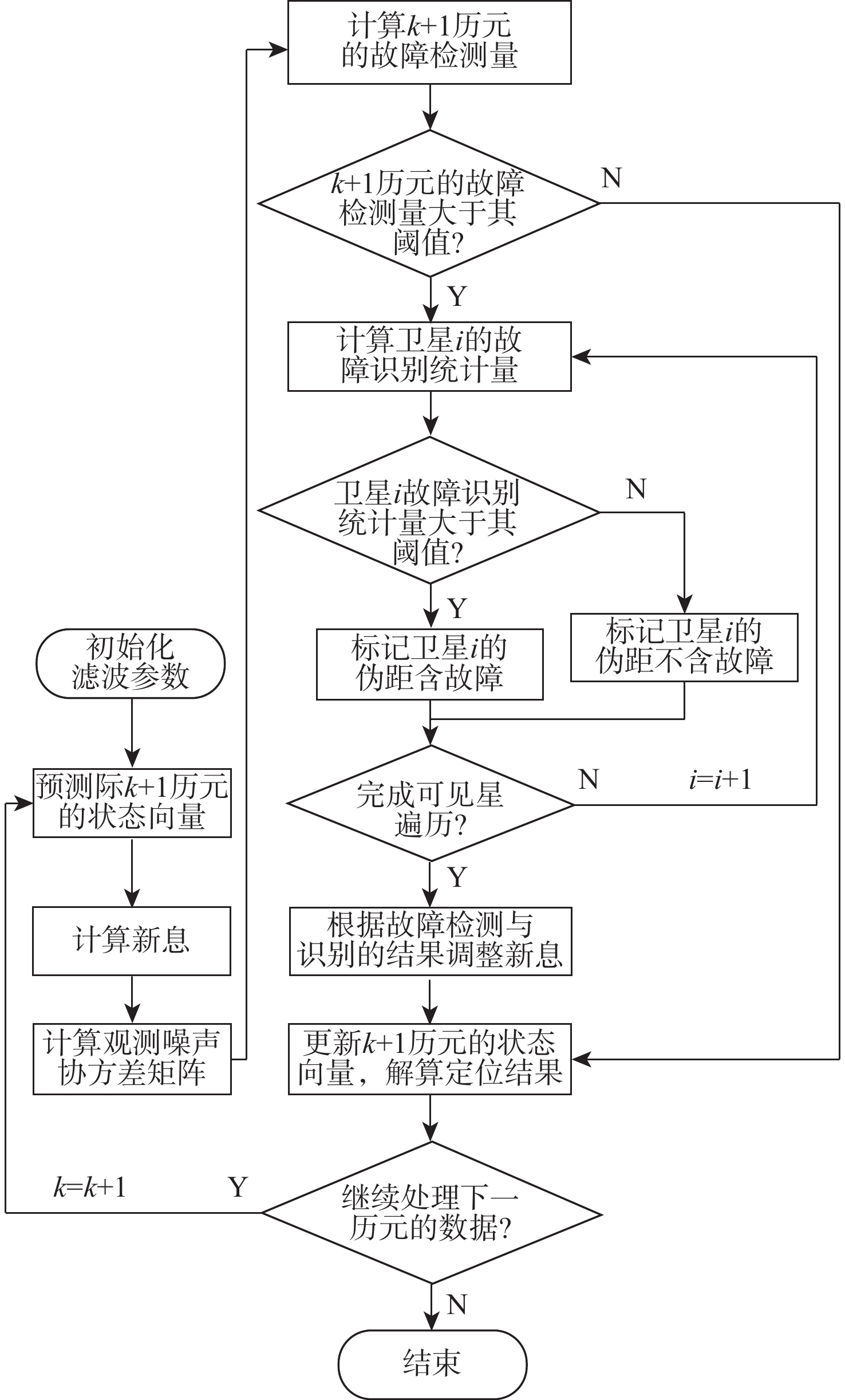
As actual observation noises vary in different environments, the fixed noise variance matrix may degrade the performance of the Kalman filter (KF)-based fault detection method. To deal with this issue, we proposed an adaptive noise variance-based fault detection algorithm. Its fault detection and identification statistics are generated based on the real-time observation noise variance matrix estimated from historical innovations with a sliding window. The innovation without faults will then be used to update the state vector for positioning solutions. Both static and dynamic modes have been tested in the experiment. In the static mode, the proposed algorithm can provide a 100% fault detection rate (FDR) and fault identification rate (FIR) of the minimum single-step error of 3 m, and the FIR for the 0.2 m/s ramp error of 100 s is 51.4%. In addition, it can provide a 100% FDR and FIR of the minimum multiple error of 4 m. In the dynamic mode, the suggested algorithm can deliver a 100% FDR and FIR of the minimum single-step error of 10 m, and a 66.25% FIR for the 0.2 m/s ramp error of 200 s. In addition, it can provide a 100% FDR and FIR of the minimum multiple-error of 12 m. Its performance is superior to the least square residual-based method and the KF-based fault detection method.

| [1] |
MENG Q, HSU L T. Integrity for autonomous vehicles and towards a novel alert limit determination method[J]. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2021, 235(4): 996-1006. doi: 10.1177/0954407020965760
|
| [2] |
HSU L T. GNSS multipath detection using a machine learning approach[C]//2017 IEEE 20th International Conference on Intelligent Transportation Systems. Piscataway: IEEE Press, 2017: 1-6.
|
| [3] |
LEE Y. Analysis of range and position comparison methods as a means to provide GPS integrity in the user receiver[J]. Navigation Journal of the Institute of Navigation, 1986: 1-17.
|
| [4] |
PARKINSON B W, AXELRAD P. Autonomous GPS integrity monitoring using the pseudorange residual[J]. Navigation, 1988, 35(2): 255-274. doi: 10.1002/j.2161-4296.1988.tb00955.x
|
| [5] |
STURZA M A. Navigation system integrity monitoring using redundant measurements[J]. Navigation, 1988, 35(4): 483-501. doi: 10.1002/j.2161-4296.1988.tb00975.x
|
| [6] |
BROWN R G. A baseline GPS RAIM scheme and a note on the equivalence of three RAIM methods[J]. Navigation, 1992, 39(3): 301-316. doi: 10.1002/j.2161-4296.1992.tb02278.x
|
| [7] |
沙海, 黄新明, 刘文祥, 等. 基于非相干积累的微小伪距偏差RAIM方法研究[J]. 宇航学报, 2014, 35(6): 708-712.
SHA H, HUANG X M, LIU W X, et al. Research on the RAIM method based on non-coherent accumulation for tiny pseudo-range bias[J]. Journal of Astronautics, 2014, 35(6): 708-712(in Chinese).
|
| [8] |
沙海, 田丰, 王东会, 等. 用于消除缓变伪距偏差的抗差扩展卡尔曼滤波方法[J]. 国防科技大学学报, 2014, 36(5): 131-135. doi: 10.11887/j.cn.201405022
SHA H, TIAN F, WANG D H, et al. A new robust extended Kalman filter method for eliminating the slowly growing pseudo-range error[J]. Journal of National University of Defense Technology, 2014, 36(5): 131-135(in Chinese). doi: 10.11887/j.cn.201405022
|
| [9] |
BHATTACHARYYA S, GEBRE-EGZIABHER D. Kalman filter–based RAIM for GNSS receivers[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 2444-2459. doi: 10.1109/TAES.2015.130585
|
| [10] |
黄小平, 王岩. 卡尔曼滤波原理及应用: MATLAB仿真[M]. 北京: 电子工业出版社, 2015: 77-79.
HUANG X P, WANG Y. Principle and application of Kalman filter: MATLAB simulation [M]. Beijing: Publishing House of Electronics Industry, 2015: 77-79 (in Chinese).
|
| [11] |
王尔申, 庞涛, 曲萍萍, 等. 基于粒子滤波和似然比的接收机自主完好性监测算法[J]. 南京航空航天大学学报, 2015, 47(1): 46-51. doi: 10.16356/j.1005-2615.2015.01.006
WANG E S, PANG T, QU P P, et al. RAIM algorithm based on particle filter and likelihood ratio method[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2015, 47(1): 46-51(in Chinese). doi: 10.16356/j.1005-2615.2015.01.006
|
| [12] |
王尔申, 曲萍萍, 庞涛, 等. 粒子群优化粒子滤波的接收机自主完好性监测[J]. 北京航空航天大学学报, 2016, 42(12): 2572-2578. doi: 10.13700/j.bh.1001-5965.2016.0362
WANG E S, QU P P, PANG T, et al. Receiver autonomous integrity monitoring based on particle swarm optimization particle filter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(12): 2572-2578(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0362
|
| [13] |
刘江, 蔡伯根, 王剑, 等. 专用短程通信辅助的车辆卫星定位故障检测方法[J]. 中国公路学报, 2021, 34(11): 265-281. doi: 10.3969/j.issn.1001-7372.2021.11.022
LIU J, CAI B G, WANG J, et al. Dedicated short-range-communication-aided fault detection method for satellite-based vehicle positioning[J]. China Journal of Highway and Transport, 2021, 34(11): 265-281(in Chinese). doi: 10.3969/j.issn.1001-7372.2021.11.022
|
| [14] |
吴云. GNSS粗差检测的“快照”法与“滤波”法的比较研究[J]. 武汉大学学报·信息科学版, 2010, 35(6): 649-652. doi: 10.13203/j.whugis2010.06.024
WU Y. GNSS fault detection and identification performance comparison of snapshot and filtering[J]. Geomatics and Information Science of Wuhan University, 2010, 35(6): 649-652(in Chinese). doi: 10.13203/j.whugis2010.06.024
|
| [15] |
许明, 刘建业, 袁信. 自适应卡尔曼滤波在惯导初始对准中的应用研究[J]. 中国惯性技术学报, 1999, 7(3): 15-17. doi: 10.3969/j.issn.1005-6734.1999.03.003
XU M, LIU J Y, YUAN X. The application of adaptive Kalman filter technique in initial alignment of inertial navigation system[J]. Journal of Chinese Inertial Technology, 1999, 7(3): 15-17(in Chinese). doi: 10.3969/j.issn.1005-6734.1999.03.003
|
| [16] |
MOHAMED A H, SCHWARZ K P. Adaptive Kalman filtering for INS/GPS[J]. Journal of Geodesy, 1999, 73(4): 193-203. doi: 10.1007/s001900050236
|
Figures(31) / Tables(15)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: